Proyecto 12 Coche Inteligente Seguidor Ultrasónico
1. Descripción
En este proyecto, buscaremos detectar la distancia entre el coche inteligente 4WD y los obstáculos delante mediante un sensor ultrasónico para controlar dos motores de manera que el coche se mueva y el tablero LED 8*8 muestre un patrón facial sonriente.
2. Diagrama de Flujo
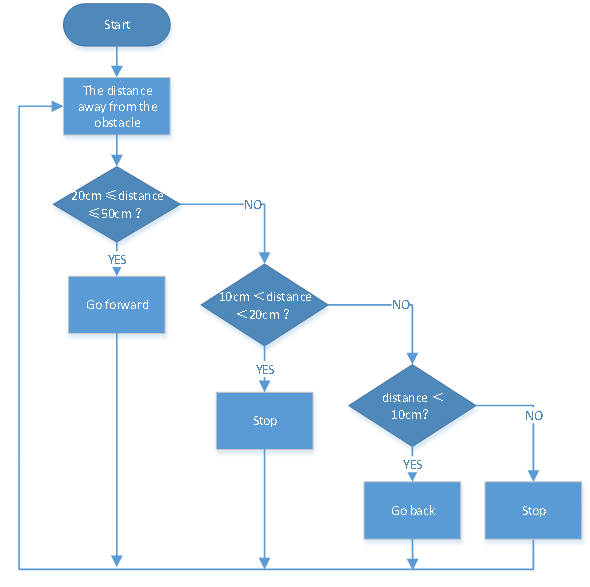
| Detección | Distancia medida de los obstáculos frontales | distancia (unidad: cm) |
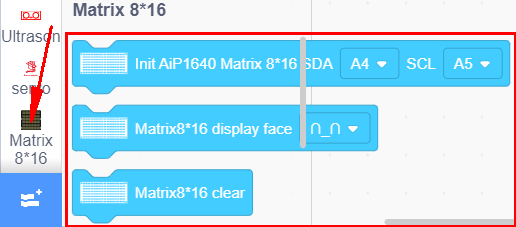
| Configuración | El tablero LED 8*16 muestra un patrón de sonrisa. | |
| Configurar servo a 90° | ||
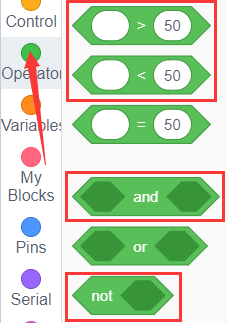
| Condición | distancia≥20 y distancia≤50 | |
| Estado | Avanzar | |
| Condición | distancia>10 y distancia<20 | |
| distancia>50 | ||
| Condición | detener | |
| Condición | distancia≤10 | |
| Condición | Retroceder |
3. Diagrama de Conexiones
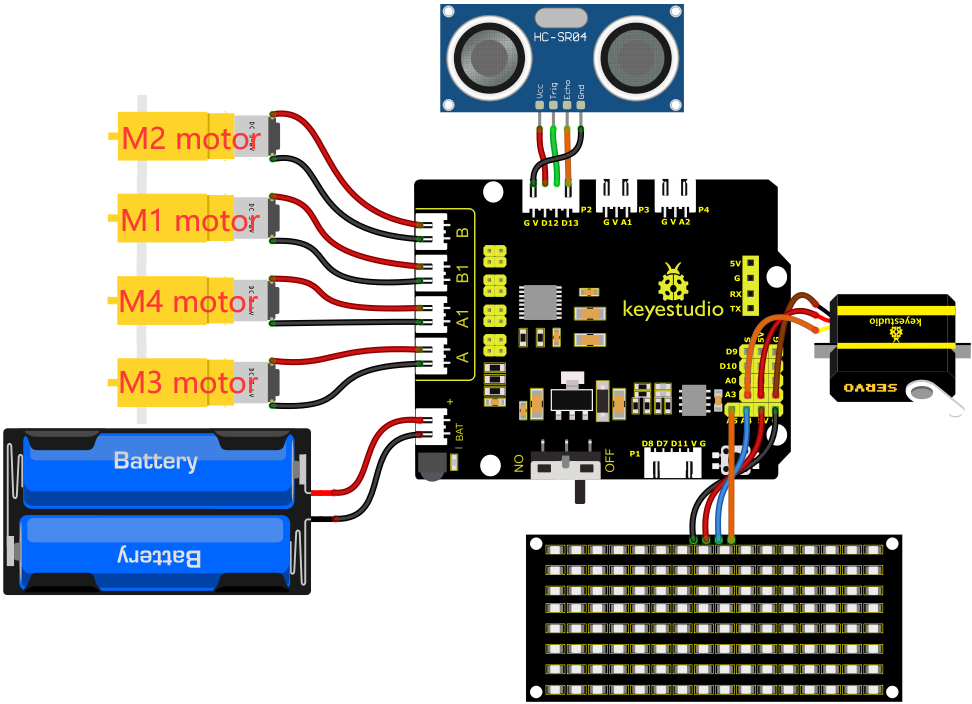
Conexiones:
1). GND, VCC, SDA y SCL del tablero LED 8*8 están conectados a G (GND), V (VCC), A4 y A5 de la placa de expansión.
2). VCC, Trig, Echo y Gnd del sensor ultrasónico están conectados a 5V (V), D12 (S), D13 (S) y Gnd (G).
3). El servo está conectado a G, V y A3. El cable marrón está conectado a Gnd (G), el cable rojo a 5V (V) y el cable naranja a A3.
4). La alimentación está conectada al puerto BAT.
4. Código de Prueba
Antes de escribir el código, es necesario importar los archivos de biblioteca del sensor ultrasónico, el tablero LED 8x16 y el servo. Los pasos específicos son los siguientes:
Haz clic en  para entrar en la interfaz de biblioteca de extensiones de sensores/módulos/componentes, luego busca el sensor “Ultrasonic”
para entrar en la interfaz de biblioteca de extensiones de sensores/módulos/componentes, luego busca el sensor “Ultrasonic”  y haz clic en él.
y haz clic en él.
De esta manera, “Not loaded” cambia a “loaded”, indicando que el sensor “Ultrasonic” fue añadido con éxito.


Los archivos de biblioteca del tablero LED 8x16 y del servo se añaden de la misma forma que el sensor ultrasónico.
Haz clic en  para volver a la interfaz del editor de código, se pueden ver los bloques de instrucciones del sensor “Ultrasonic”, el módulo “Matrix 8*16 Aip1640” y el componente “Servo” en el área de módulos.
para volver a la interfaz del editor de código, se pueden ver los bloques de instrucciones del sensor “Ultrasonic”, el módulo “Matrix 8*16 Aip1640” y el componente “Servo” en el área de módulos.
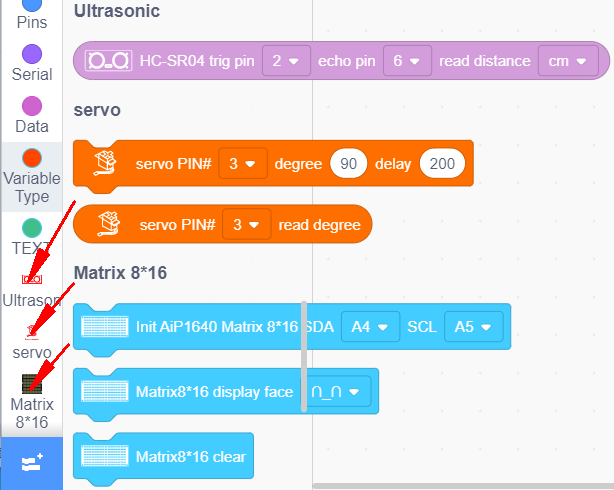
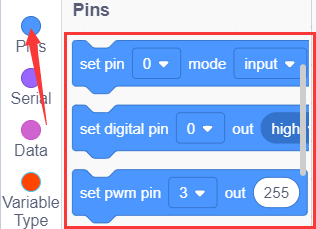
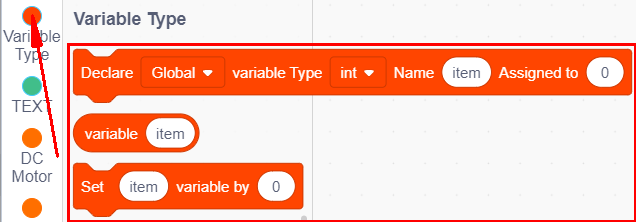
Puedes arrastrar bloques para editar. Los bloques listados a continuación son para tu referencia
(1).
(2).
(3).
(4).
(5).
(6).
(7).
(8).
(9).
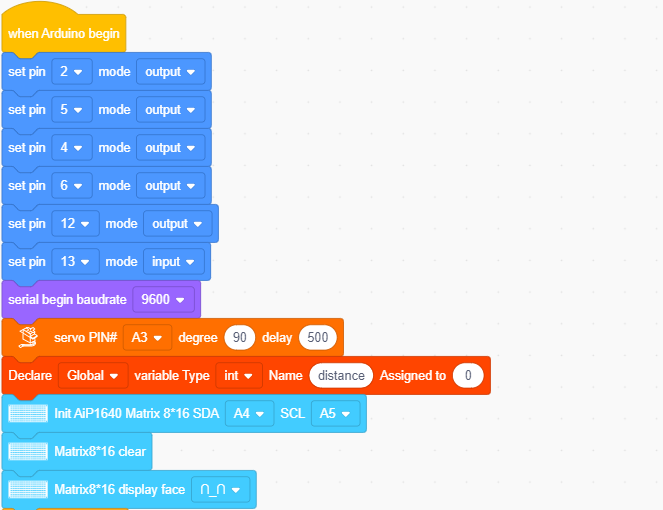
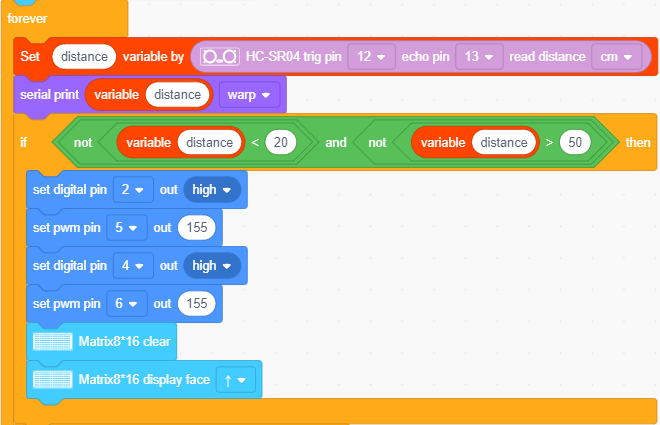
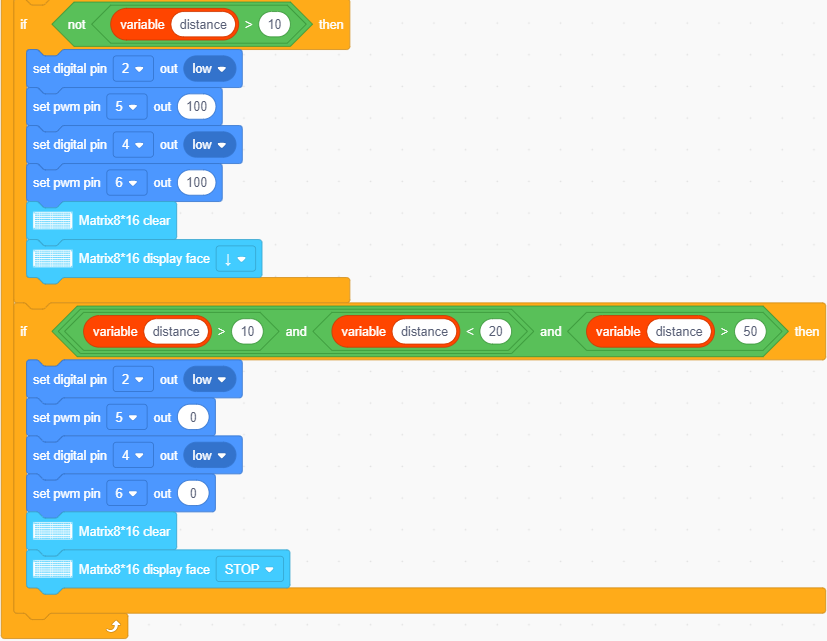
Código Completo de Prueba
5. Resultado de la Prueba
Después de subir el código con éxito a la placa V4.0, conecta las conexiones según el diagrama de conexiones, enciende la alimentación externa y luego gira el interruptor DIP a ON. Configura el servo a 90°, el coche inteligente se moverá con los obstáculos y el tablero LED 8X16 mostrará una “sonrisa”.