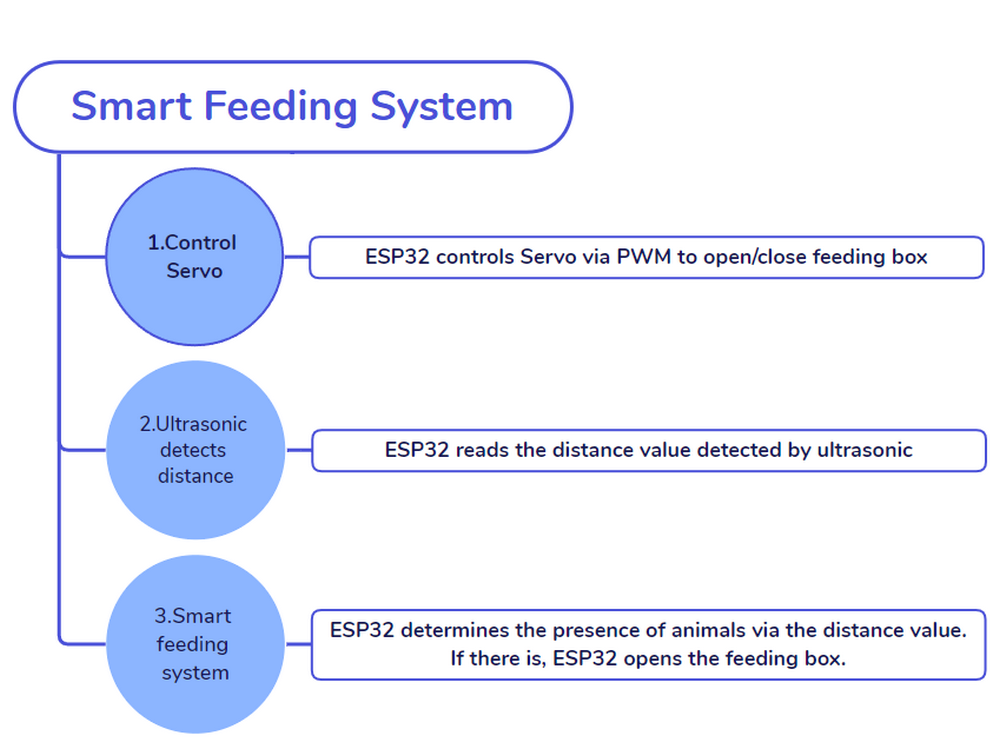
4.6 Proyecto: Sistema de Alimentación Inteligente
En este proyecto, el módulo ultrasónico detecta si los animales están en el área de alimentación, y el Servo abre automáticamente la caja de alimentación para las aves de corral. Además, la incorporación de IOT permite la monitorización remota de dichos sistemas de alimentación, lo que proporciona mucha comodidad.
En general, la automatización y el funcionamiento remoto están optimizando el proceso de alimentación para este sistema.

4.6.1 Diagrama de Flujo
4.6.2 Servo
Descripción:
El Servo, también llamado Dispositivo Servo RC, es un motor con retroalimentación. Comúnmente, el Servo realiza un control de posición preciso y emite un alto par, lo que a menudo aparece en proyectos de robótica, coches RC, aviones y aeronaves.
Estructura Interna:
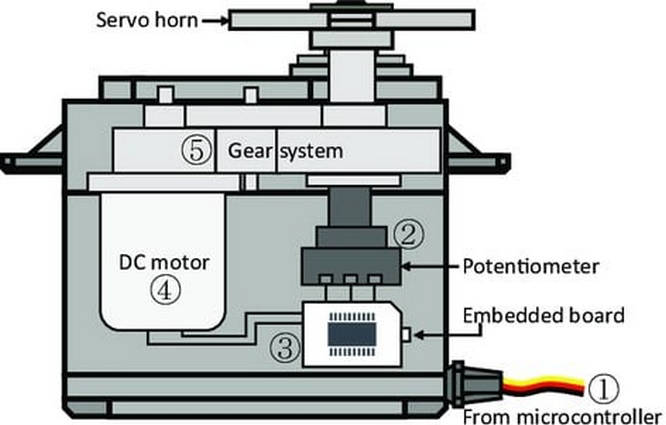
① Señal (S): Recibe la señal de control del microcontrolador.
② Potenciómetro: la parte de retroalimentación del Servo. Mide la posición del eje de salida.
③ Placa integrada (Controlador interno): el núcleo del Servo. Procesa la señal de control externa y la señal de retroalimentación de posición y acciona el Servo.
④ Motor de CC: la parte de ejecución. Emite velocidad, par y posición.
⑤ Sistema de engranajes: Escala las salidas del motor al ángulo de salida final de acuerdo con una cierta relación de transmisión.
Accionar el Servo:
La Señal (S) recibe PWM para controlar la salida del Servo, y la posición del eje de salida depende directamente del ciclo de trabajo del PWM.
Por ejemplo:
Si enviamos una señal con un ancho de pulso de 1.5ms al Servo, su eje (cuerno) girará a la posición media (90°);
Si el ancho de pulso =
0.5ms, el eje gira a su mínimo (0°);Si el ancho de pulso =
2.5ms, el eje gira a su máximo (180°).
NOTA: El ángulo máximo varía según el tipo de Servos. Algunos son de 170° mientras que otros son solo de 90°. A pesar de esto, los Servos generalmente se moverán la mitad (del máximo) si reciben una señal con un ancho de pulso de 1.5ms.
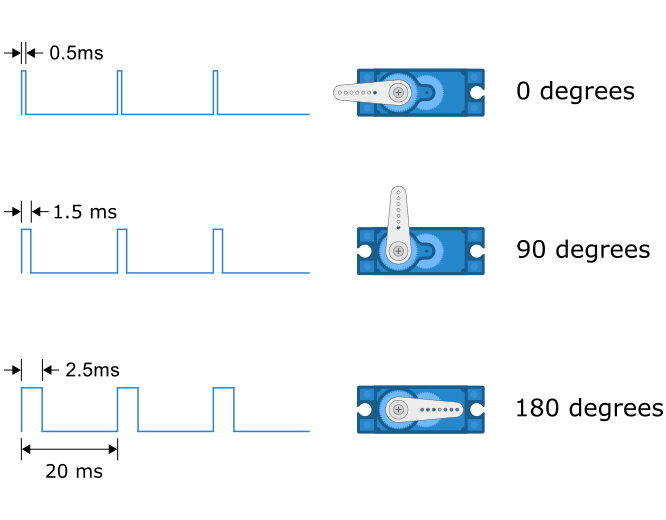
El período de un Servo suele durar 20ms y produce pulsos a una frecuencia de 50Hz. La mayoría de los servos funcionan normalmente a 40~200Hz.
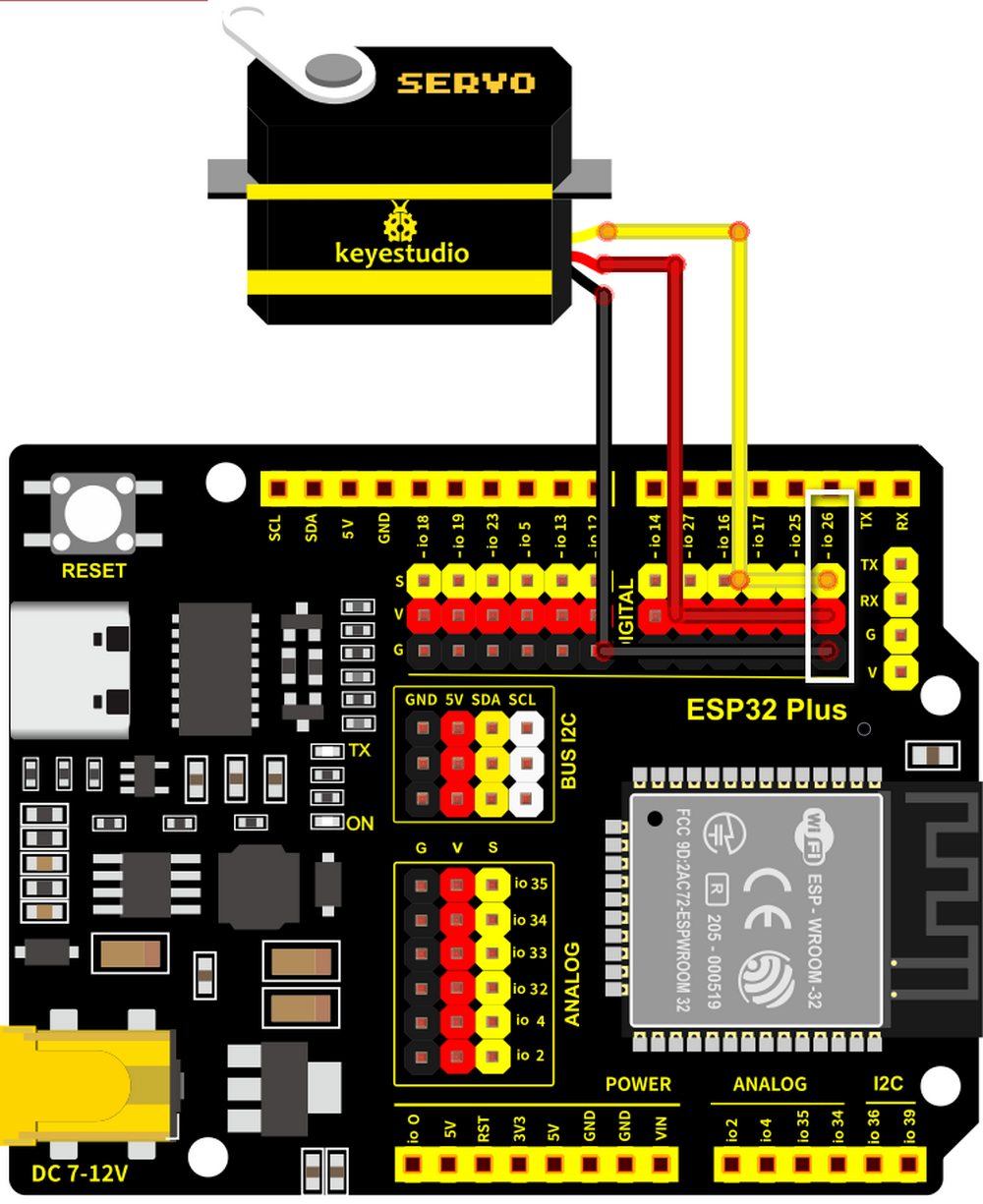
Diagrama de Cableado:
Conecte el Servo a io26.
Atención: Conecte el amarillo a S (Señal), el rojo a V (Alimentación) y el negro a GND. ¡No los invierta!
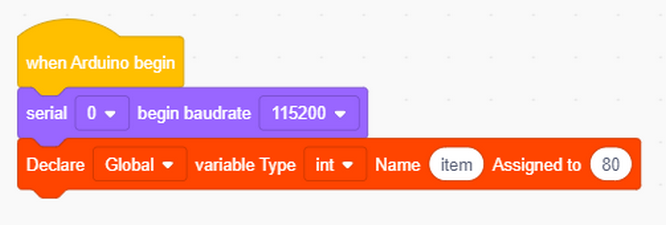
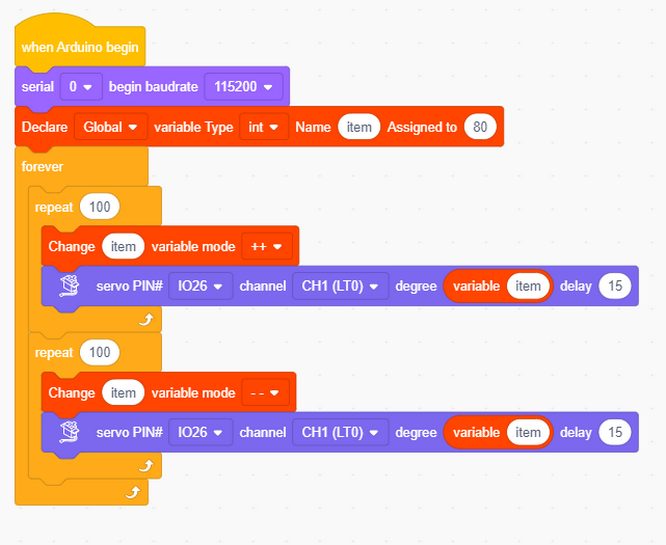
Código de Prueba:
Inicialice el puerto serie y defina una variable item con una asignación de 80.
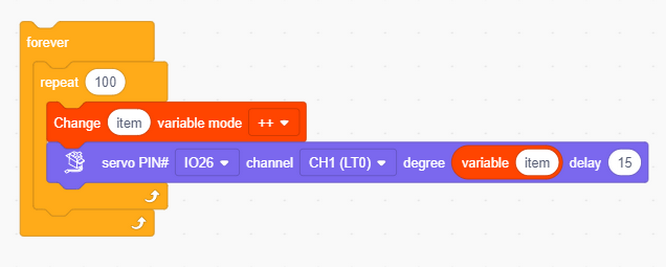
Establezca item en el ángulo del Servo de 80° a 180°, girando 1° cada 15ms.
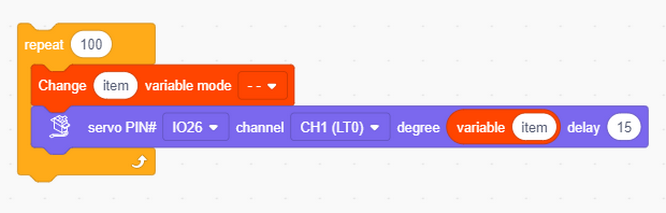
El Servo gira 1° cada 15ms, de 180° a 80°.
Código completo:
Resultado de la Prueba:
La caja de alimentación se abre y se cierra lentamente, lo cual es controlable.
NOTA: El servo SG90 puede girar 180°. Como la caja de alimentación es pequeña, 100° de rotación son suficientes para cerrar completamente la caja.
80°: completamente abierto
120°: medio abierto
180°: cerrado
ATENCIÓN
¡No meta los dedos en la caja para evitar pellizcos!
¡No bloquee la puerta con algo para evitar dañar el servo!
4.6.3 Sensor Ultrasónico
Descripción:

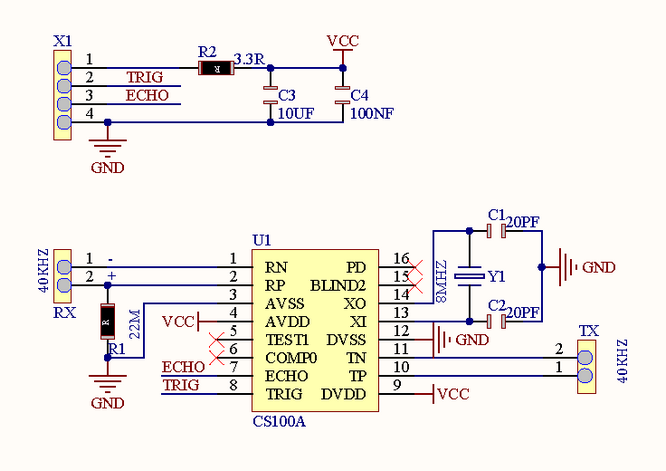
Diagrama Esquemático:
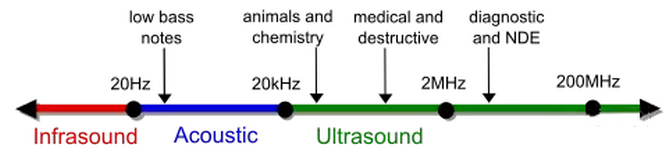
La frecuencia de las ondas sonoras que el ser humano puede oír es de 20Hz ~ 20KHz, mientras que las ondas ultrasónicas están fuera de ese rango.
Ultrasónico:
El módulo ultrasónico convierte la electricidad y la onda ultrasónica entre sí por efecto piezoeléctrico, y también transmite y recibe ondas ultrasónicas.
Este tipo de onda se caracteriza por su directividad, fuerte penetración y fácil concentración de energía sonora.
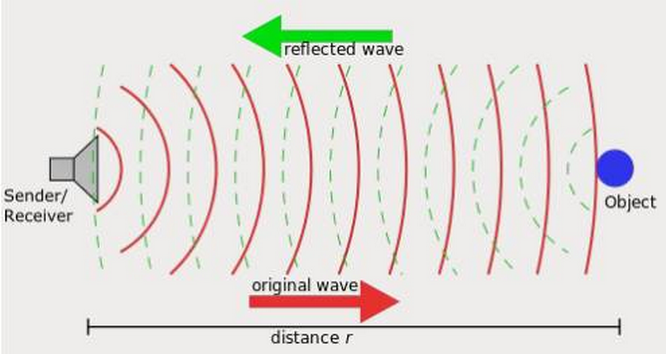
En este sistema de medición de distancia ultrasónico, primero programamos en la MCU (placa de desarrollo ESP32) para generar una onda cuadrada original a 40KHz y accionamos el módulo ultrasónico para que la emita. Inmediatamente, el módulo calcula la distancia al objeto después de recibir la onda reflejada (Eco) amplificada y conformada por el circuito. Aquí, registra la duración de la emisión y la reflexión y calcula la distancia según la diferencia de tiempo.
Simplemente, la MCU controla el módulo para emitir ondas ultrasónicas que rebotan después de encontrar obstáculos y son recibidas por el módulo. La diferencia de tiempo entre ellas es un factor importante para calcular la distancia (la velocidad de propagación del sonido en el aire es de 340m/s).
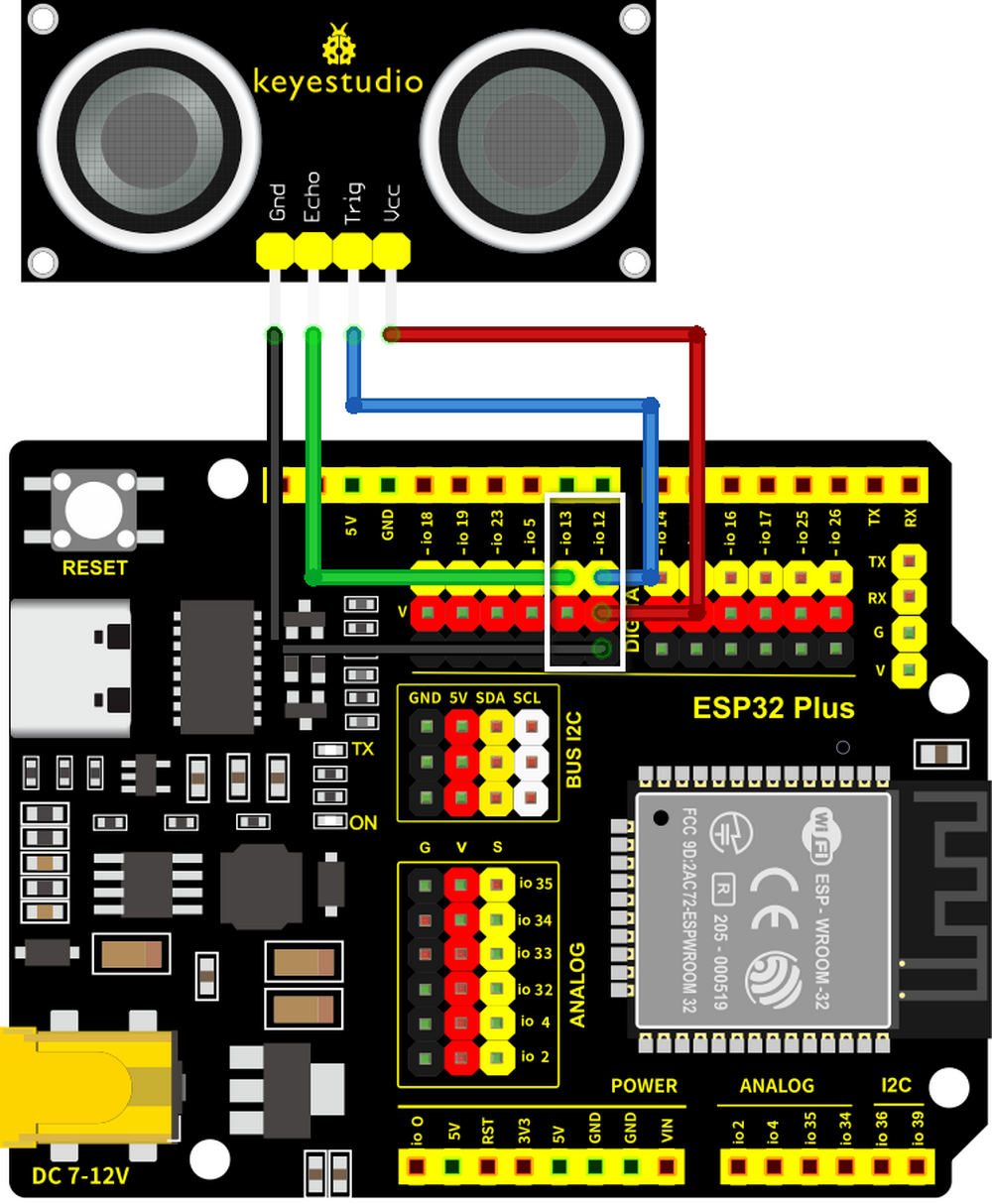
Diagrama de Cableado:
Conecte el Echo del módulo ultrasónico a io13 y Trig a io12.
Atención: Conecte el amarillo a S (Señal) y el rojo a V (Alimentación). ¡No los invierta!
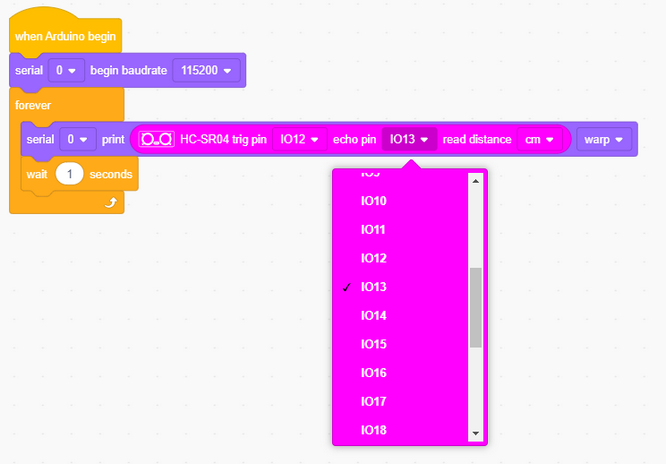
Código de Prueba:
Establezca el pin correcto: Trig al pin io12; Echo al pin io13.
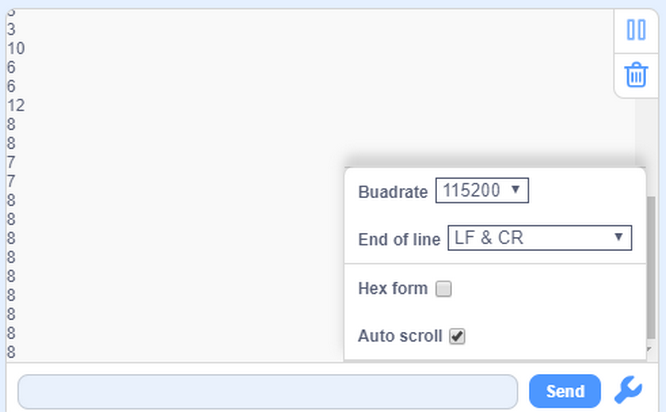
Resultado de la Prueba:
En este kit, el rango de detección está dentro de 3~8cm.
Abra el monitor serie y observe.
4.6.4 Sistema de Alimentación Inteligente
Descripción:
El sistema de alimentación inteligente alimenta de forma inteligente a las aves de corral domésticas mediante un módulo ultrasónico y un servo. El primero detecta la distancia a los animales mientras que el segundo controla la apertura o el cierre de la caja de alimentación. Cuando se detecta una mascota cerca de la caja, el servo la abre para alimentarla.
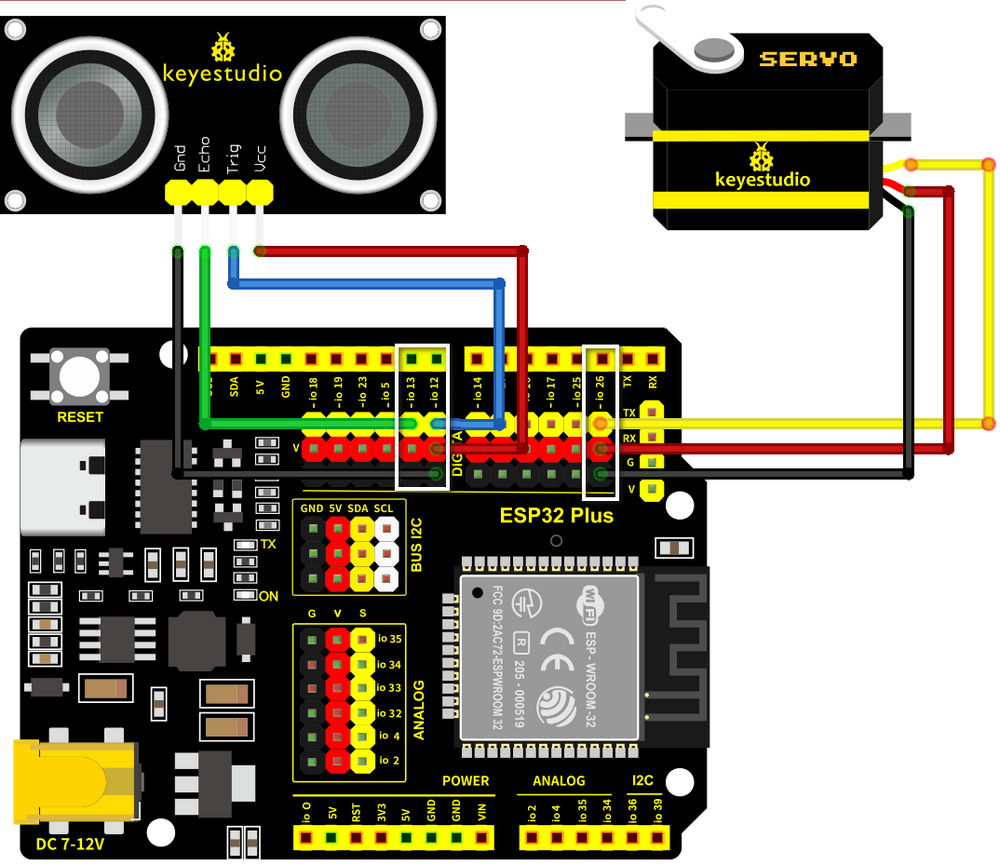
Diagrama de Cableado:
Conecte el Echo del módulo ultrasónico a io13 y Trig a io12; conecte el servo a io26.
Atención: Conecte el amarillo a S (Señal), el rojo a V (Alimentación) y el negro a GND. ¡No los invierta!
Código de Prueba:
Flujo de código:

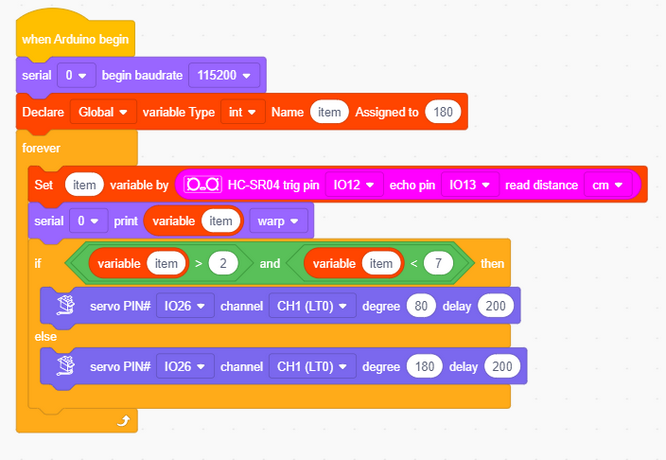
Código:
Inicialice el puerto serie. Defina una variable y asígnele 180.
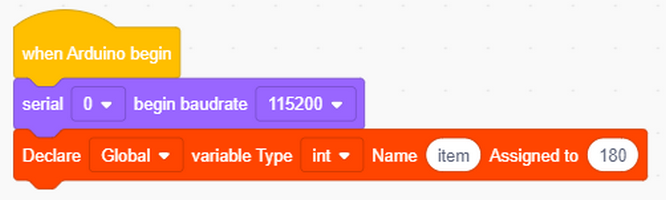
Configure el pin correctamente e imprima el valor recibido.

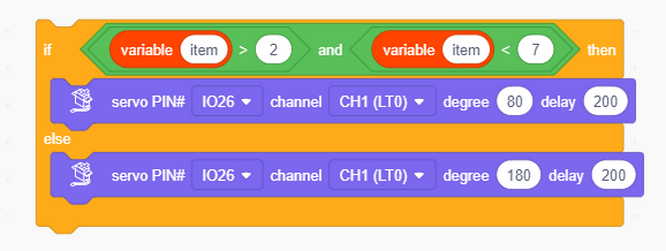
Determine el valor de distancia detectado. Si está dentro de 2cm ~ 7cm, la caja de alimentación se abrirá.
Código completo:
Resultado de la Prueba:
Cuando se detecta un animal, se abre la caja de alimentación.
ATENCIÓN
¡No meta los dedos en la caja para evitar pellizcos!
¡No bloquee la puerta con algo para evitar dañar el servo!
4.6.5 Preguntas Frecuentes
P: El Servo no funciona.
R: Puede que esté atascado por sí mismo o por los cables al montar la placa inferior. Antes de instalar, ajuste el servo a 180° primero. Para saber cómo, consulte la guía de instalación.
P: La distancia detectada es inexacta.
R: Al detectar, mida desde el cabezal transmisor. En este caso, este módulo no es un detector de alta