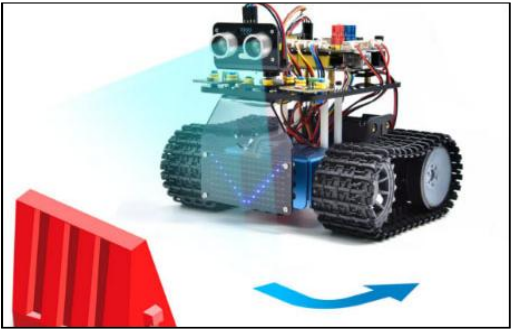
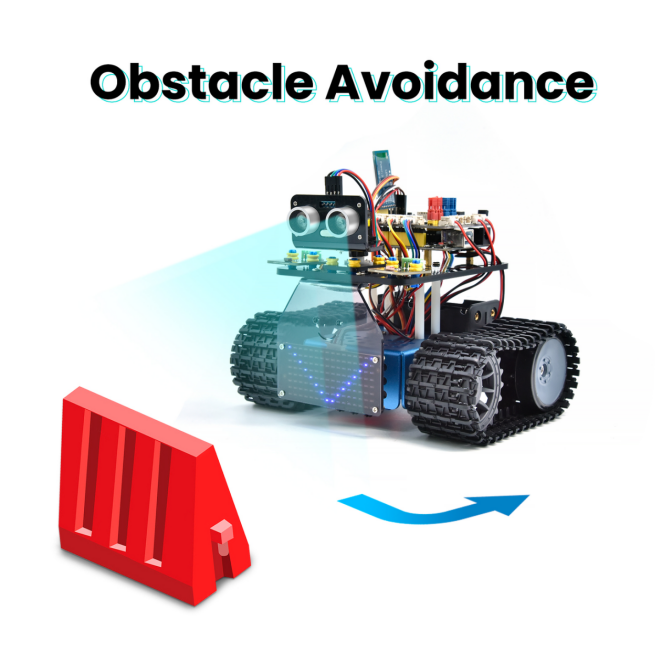
Project 12: Ultrasonic Hindernisvermijdende Tank
(1)Beschrijving:
In het vorige project maakten we een ultrasone geluidvolgende slimme auto. In feite kunnen we met dezelfde componenten en dezelfde bedradingsmethode, door alleen de testcode te veranderen, er een ultrasone hindernisvermijdende slimme auto van maken. Deze slimme auto kan meebewegen met de beweging van de menselijke handen.
We gebruiken ultrasone sensoren om de afstand te meten tussen de slimme auto en het obstakel aan de voorkant, en besturen vervolgens de rotatie van de twee motoren op basis van deze gegevens om zo de bewegingen van de slimme auto te regelen.
Detectie |
|
|---|---|
Afstand gemeten door de ultrasone sensor tussen de auto en het obstakel aan de voorkant |
a(cm) |
Afstand gemeten door de ultrasone sensor tussen de auto en het obstakel aan de rechterkant |
a2(cm) |
Afstand gemeten door de ultrasone sensor tussen de auto en het obstakel aan de linkerkant |
a1(cm) |
Instelling: stel de beginhoek van de servo in op 90° |
Conditie 1 |
Conditie 2 |
Conditie 3 |
Beweging |
|---|---|---|---|
a<20 |
Stop gedurende 500ms; |
||
a1<50 |
Vergelijk a1 met a2 |
||
a1>a2 |
Stel de hoek van de servo in op 90°, draai links voor 700ms (stel PWM in op 255) |
||
a1<a2 |
Stel de hoek van de servo in op 90°, draai rechts voor 700ms (stel PWM in op 255) |
||
Conditie 1 |
Conditie 2 |
Beweging |
|
a<20 |
a1≥50 |
Willekeurig |
stel de hoek van de servo in op 90°, draai links voor 500ms (stel PWM in op 255) |
Conditie |
Beweging |
||
a≥20 |
beweeg vooruit (stel PWM in op 100) |
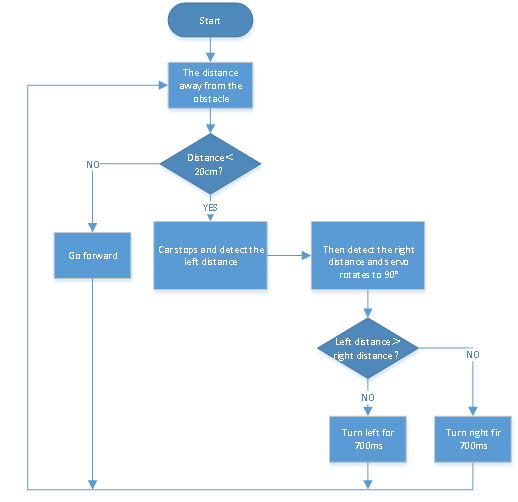
(2)Stroomdiagram:
(3)Aansluitingsdiagram:
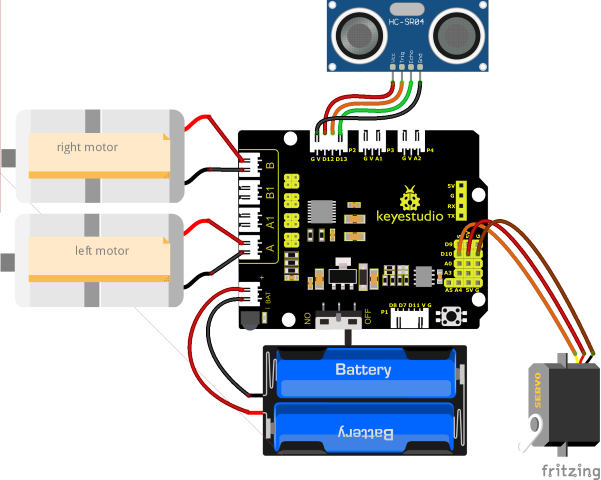
(Opmerking: de bruine, rode en oranje draden van de servo zijn respectievelijk verbonden met G (GND), V(5V)en D10 van de uitbreidingskaart;en voor de ultrasone sensor is de VCC-pin verbonden met 5v (V), de Trig-pin met digitaal 12 (S), de Echo-pin met digitaal 13 (S), en de Gnd-pin met Gnd (G); hetzelfde als het vorige project.)
(4)Testcode:
(Opmerking: Sluit de Bluetooth-module niet aan voordat u de code uploadt, omdat het uploaden van de code ook gebruik maakt van seriële communicatie, en er mogelijk conflicten kunnen optreden met de Bluetooth seriële communicatie, waardoor het uploaden kan mislukken.)
/*
Keyestudio Mini Tank Robot V3 (Popular Edition)
lesson 12
Ultrasonic avoid tank
http://www.keyestudio.com
*/
#define servoPin 10 //De pin van de servo
int a, a1, a2;
#define ML_Ctrl 4 //Definieer de richtingsbesturingspin van de linkermotor
#define ML_PWM 6 //Definieer de PWM-besturingspin van de linkermotor
#define MR_Ctrl 2 //Definieer de richtingsbesturingspin van de rechtermotor
#define MR_PWM 5 //Definieer de PWM-besturingspin van de rechtermotor
#define Trig 12
#define Echo 13
float distance;
void setup()
{
Serial.begin(9600);
pinMode(servoPin, OUTPUT);
pinMode(Trig, OUTPUT);
pinMode(Echo, INPUT);
pinMode(ML_Ctrl, OUTPUT);
pinMode(ML_PWM, OUTPUT);
pinMode(MR_Ctrl, OUTPUT);
pinMode(MR_PWM, OUTPUT);
procedure(90); //Stel de hoek van de servo in op 90°
delay(500); //vertraging van 500ms
}
void loop()
{
a = checkdistance(); //Wijs de door de ultrasone sensor gedetecteerde afstand aan de voorkant toe aan de variabele a
if (a < 20) //Wanneer de afstand aan de voorkant kleiner is dan 20cm
{
Car_Stop(); //De robot stopt
delay(500); //vertraging van 500ms
procedure(180); //Ultrasone pan-tilt draait naar links
delay(500); //vertraging van 500ms
a1 = checkdistance(); //Wijs de door de ultrasone sensor gedetecteerde afstand aan de linkerkant toe aan de variabele a1
delay(100); //waarde lezen
procedure(0); //Ultrasone pan-tilt draait naar rechts
delay(500); //vertraging van 500ms
a2 = checkdistance(); //Wijs de door de ultrasone sensor gedetecteerde afstand aan de rechterkant toe aan de variabele a2
delay(100); //waarde lezen
procedure(90); //Terug naar 90°
delay(500);
if (a1 > a2)
{ //Wanneer de afstand aan de linkerkant groter is dan aan de rechterkant
Car_left(); //De robot draait naar links
delay(700); //700ms naar links draaien
}
else
{
Car_right(); //700ms naar links draaien
delay(700);
}
}
else//Wanneer de afstand aan de voorkant >=20cm is, beweegt de robot vooruit
{
Car_front(); //vooruit rijden
}
}
void Car_front()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 55);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 55);
}
void Car_back()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 200);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 200);
}
void Car_left()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 55);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 200);
}
void Car_right()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 200);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 55);
}
void Car_Stop()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 0);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 0);
}
//De functie bestuurt servo's
void procedure(byte myangle)
{
int pulsewidth;
for (int i = 0; i < 5; i++)
{
pulsewidth = myangle * 11 + 500; //Bereken de waarde van de pulsbreedte
digitalWrite(servoPin, HIGH);
delayMicroseconds(pulsewidth); //De tijd in hoog niveau vertegenwoordigt de pulsbreedte
digitalWrite(servoPin, LOW);
delay((20 - pulsewidth / 1000)); //Omdat de cyclus 20ms is, is de resterende tijd op laag niveau
}
}
//De functie bestuurt ultrasoon geluid
float checkdistance()
{
float distance;
digitalWrite(Trig, LOW);
delayMicroseconds(2);
digitalWrite(Trig, HIGH);
delayMicroseconds(10);
digitalWrite(Trig, LOW);
distance = pulseIn(Echo, HIGH) / 58.20; //De 58.20 hier komt van 2*29.1=58.2
delay(10);
return distance;
}
(5)Testresultaat:
Na het succesvol uploaden van de testcode, de bedrading aansluiten, de DIP-schakelaar naar de ON-stand zetten en de stroom inschakelen, beweegt de slimme auto vooruit en vermijdt automatisch obstakels.