Progetto 7:Accelerometer
1. Descrizione
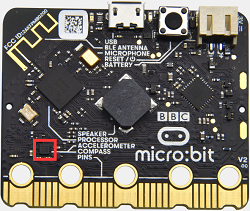
La scheda principale micro: bit main board V2 è dotata di un sensore di accelerazione gravitazionale LSM303AGR integrato, noto anche come accelerometro, con risoluzione di 8/10/12 bit. Nella sezione del codice è possibile impostare la portata a 1g, 2g, 4g e 8g.
Utilizziamo spesso un accelerometro per rilevare lo stato delle macchine.
In questo progetto mostreremo come misurare la posizione della scheda con l’accelerometro. Successivamente esamineremo i dati grezzi triassiali forniti dall’accelerometro.
2. Preparazione
A. Collegate la scheda micro:bit main board al computer tramite il cavo USB.
B. Aprite la versione offline di Mu.
3. Codice di test1
Avviate il software Mu e aprite il file “Three-axis acceleration sensor -1.py“ per importare il codice. Potete anche inserire il codice manualmente nella finestra di editing.
(Nota: Tutte le parole e i simboli devono essere scritti in inglese.)
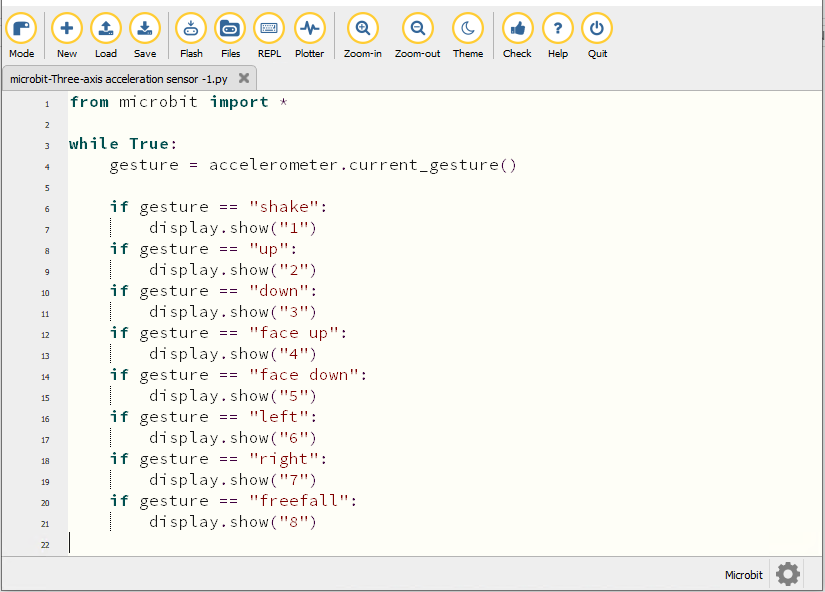
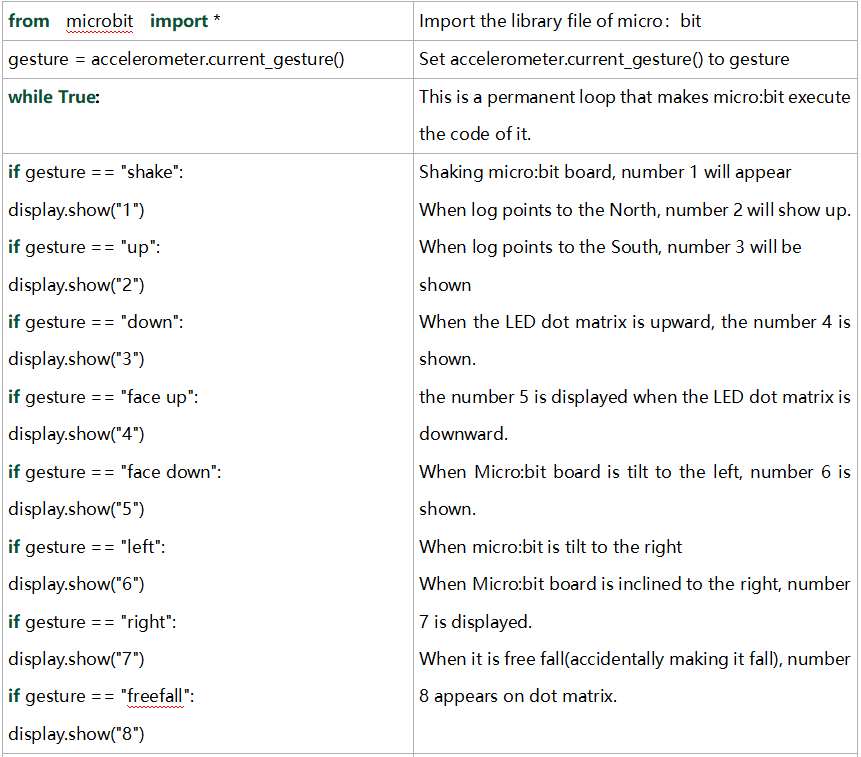
from microbit import *
while True:
gesture = accelerometer.current_gesture()
if gesture == "shake":
display.show("1")
if gesture == "up":
display.show("2")
if gesture == "down":
display.show("3")
if gesture == "face up":
display.show("4")
if gesture == "face down":
display.show("5")
if gesture == "left":
display.show("6")
if gesture == "right":
display.show("7")
if gesture == "freefall":
display.show("8")
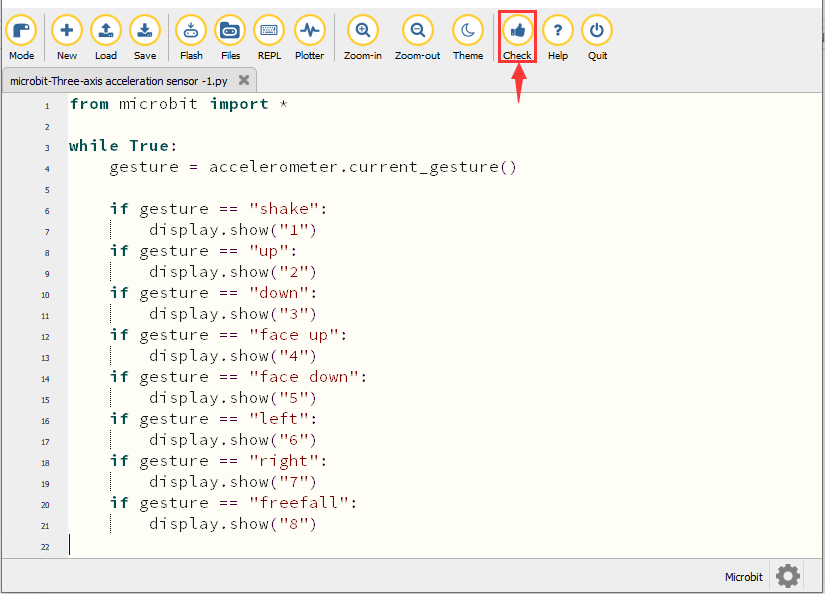
Cliccate su “Check” per verificare la presenza di errori nel codice. Il programma è errato se vengono mostrati sottolineature e cursori.
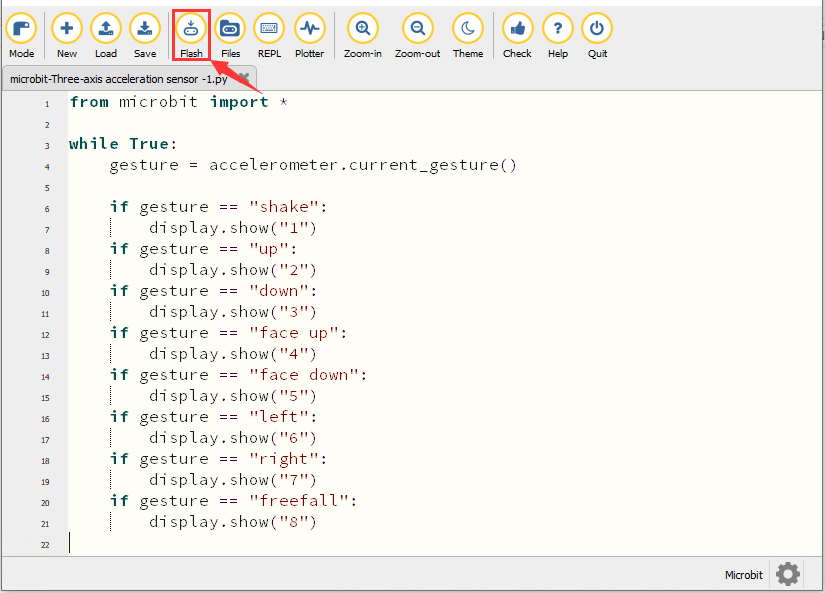
Se il codice è corretto, collegate il micro:bit al computer e cliccate su “Flash” per scaricare il codice sulla scheda micro:bit.
4. Risultato del test1
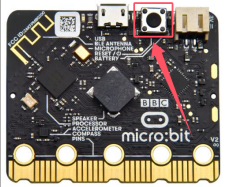
Dopo aver scaricato correttamente il codice sulla scheda, alimentate tramite il cavo micro USB o una fonte di alimentazione esterna (impostare l’interruttore DIP su ON) e premete il pulsante di reset sul micro:bit.
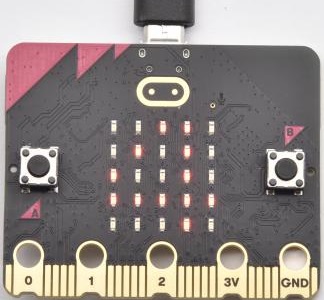
Quando scuotiamo il micro: bit main board, in qualsiasi direzione, la matrice LED visualizza la cifra “1”.
Quando è mantenuto in verticale (con il logo sopra la matrice LED), appare il numero 2.

Quando viene tenuto a testa in giù (con il logo sotto la matrice LED), viene visualizzato come di seguito.

Quando è posizionato fermo sulla scrivania, con il lato anteriore rivolto verso l’alto, compare il numero 4.
Quando è posizionato fermo sulla scrivania, con il lato posteriore rivolto verso l’alto, compare il numero 5.
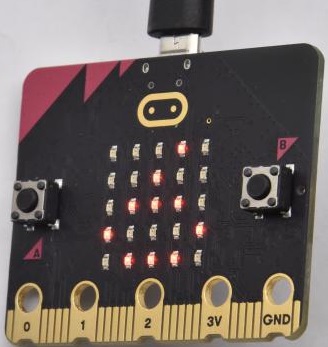
Quando la scheda è inclinata verso sinistra, la matrice LED mostra il numero 6, come mostrato di seguito:
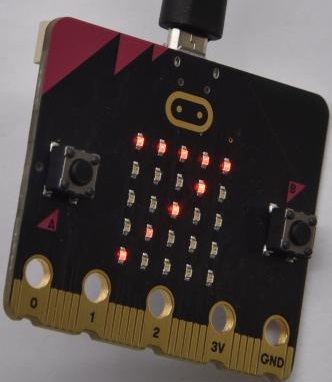
Quando la scheda è inclinata verso destra, la matrice LED visualizza il numero 7, come mostrato di seguito:
Quando la scheda viene colpita a terra, questo processo può essere considerato come una caduta libera e la matrice LED mostra il numero 8. (Si noti che questo test non è raccomandato perché potrebbe danneggiare la scheda principale.)
Attenzione: Se desiderate provare questa funzione, potete anche impostare l’accelerazione a 3g, 6g o 8g.
5. Codice di test2
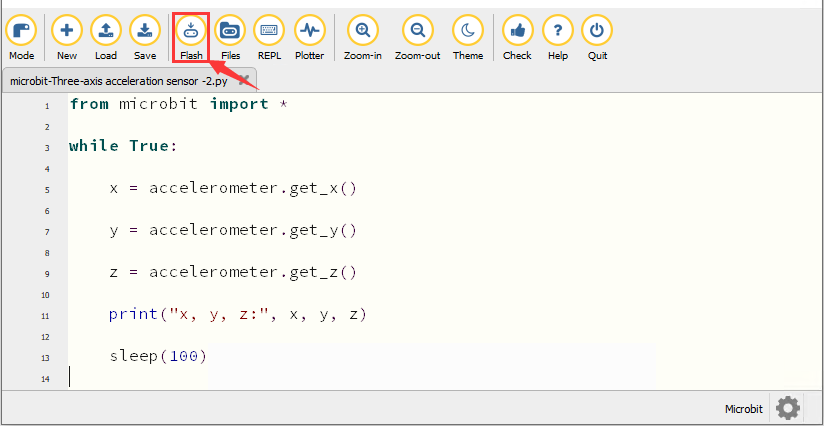
Avviate il software Mu e aprite il file “Three-axis acceleration sensor -2.py“ per importare il codice. Potete anche inserire il codice manualmente nella finestra di editing.
(Nota: Tutte le parole e i simboli devono essere scritti in inglese.)
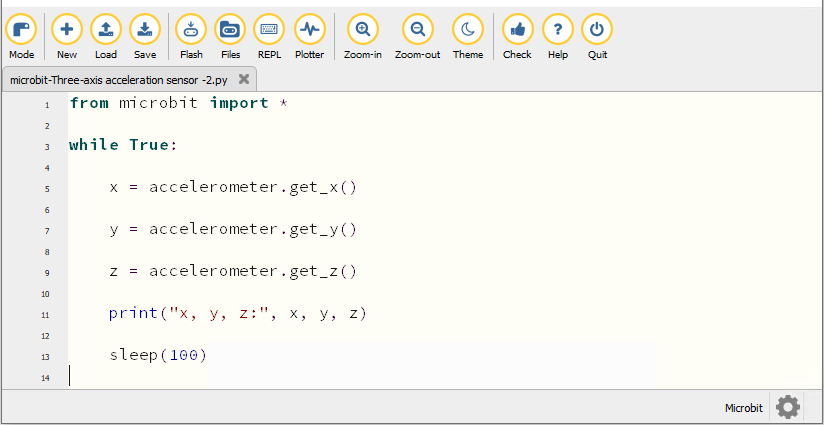
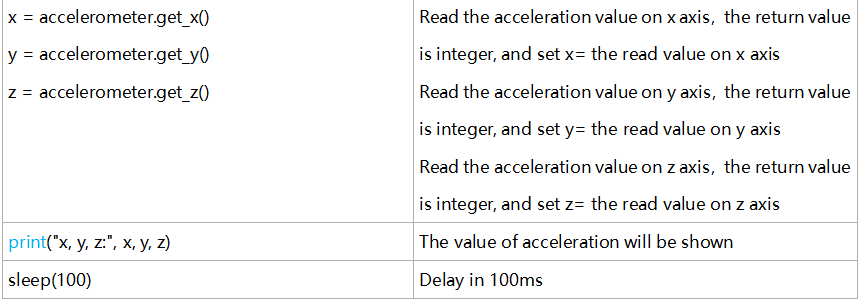
from microbit import *
while True:
x = accelerometer.get_x()
y = accelerometer.get_y()
z = accelerometer.get_z()
print("x, y, z:", x, y, z)
sleep(100)
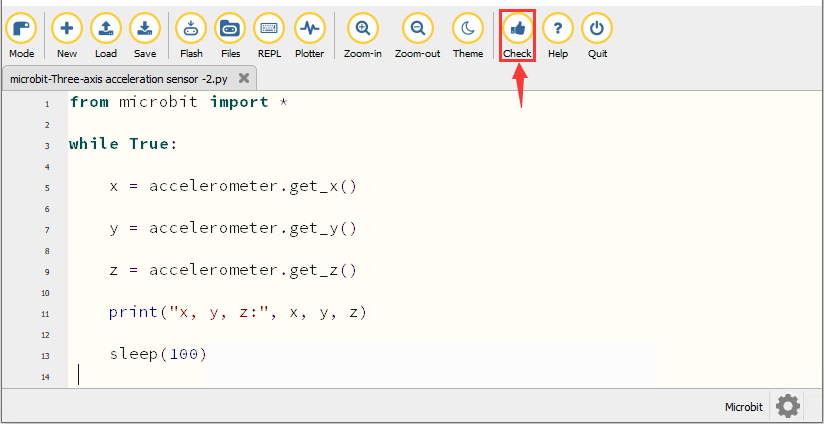
Cliccate su “Check” per verificare la presenza di errori nel codice. Il programma è errato se vengono mostrati sottolineature e cursori.
Se il codice è corretto, collegate il micro:bit al computer e cliccate su “Flash” per scaricare il codice sulla scheda micro:bit.
6. Risultato del test2
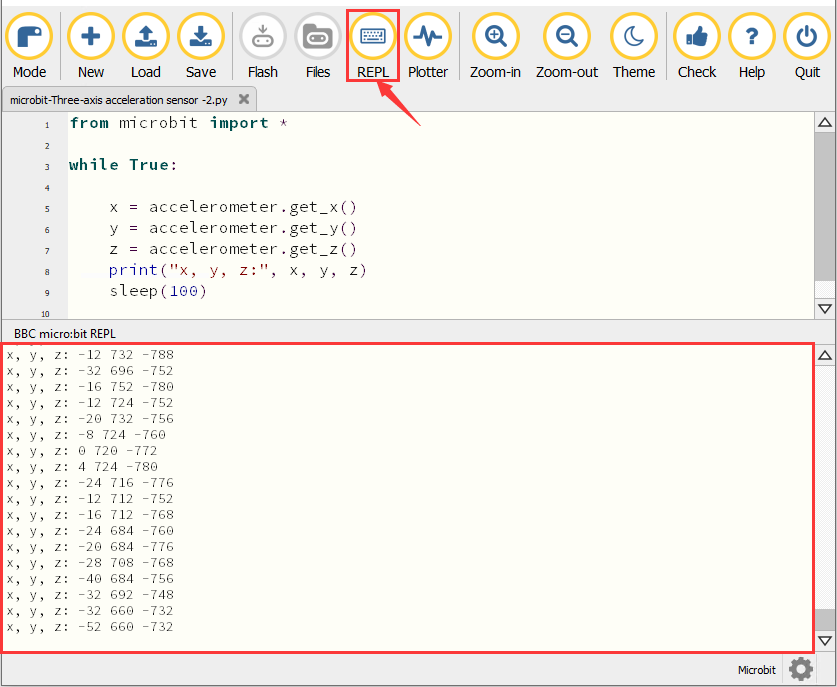
Dopo aver scaricato correttamente il codice sulla scheda, alimentate tramite il cavo micro USB o una fonte di alimentazione esterna (impostare l’interruttore DIP su ON). Cliccate su “REPL” e premete il pulsante di reset sul micro:bit.
Quindi la finestra REPL mostrerà i valori dell’accelerazione sugli assi X, Y e Z come mostrato di seguito:
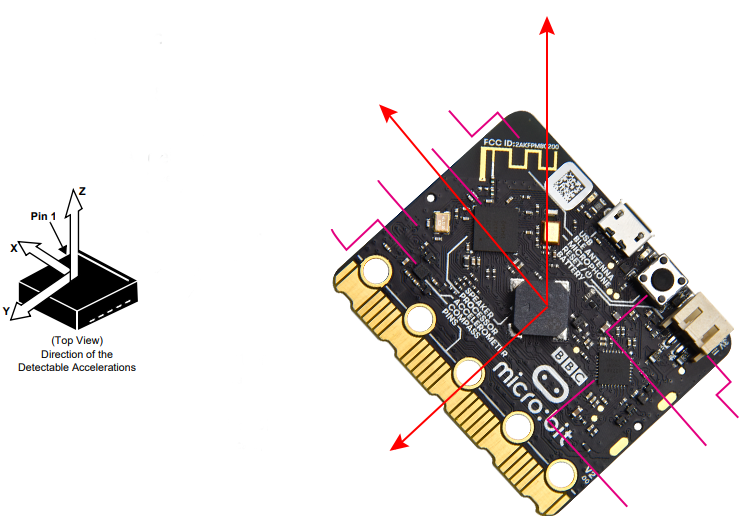
Facendo riferimento al manuale dati MMA8653FC e allo schema hardware del micro: bit main board, le coordinate dell’accelerometro del micro: bit sono riportate nella figura seguente:
7. Spiegazione del codice