Progetto 17: Sensore di tracciamento della linea
Progetto 17.1: Rilevamento del sensore di tracciamento della linea
1. Descrizione
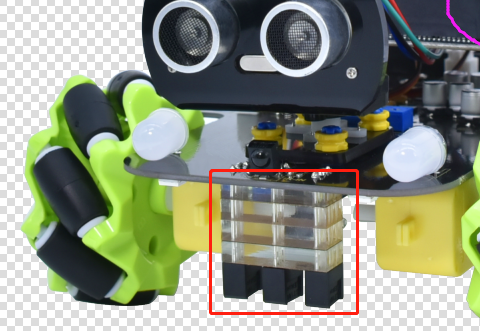
La scheda driver dei motori del Keyestudio 4WD Mecanum Robot Car è dotata di un sensore di tracciamento della linea a 3 canali, che utilizza tubi IR TCRT5000 e 3 potenziometri.
Il tubo IR TCRT5000 contiene un emettitore IR e un ricevitore IR. Quando i segnali infrarossi emessi vengono riflessi e ricevuti dal tubo ricevente, la resistenza del ricevitore cambierà, il che si riflette generalmente nella variazione di tensione sul circuito.
La resistenza varia a seconda dell’intensità dei segnali infrarossi ricevuti dal ricevitore, che dipende spesso dal colore della superficie riflettente e dalla distanza tra la superficie riflettente e il ricevitore. Durante il rilevamento, il nero è attivo ad alto livello e il bianco è attivo a basso livello.
2. Principio di funzionamento
Quando l’auto passa sopra una strada bianca, il tubo emettitore IR installato sotto l’auto emette segnali infrarossi per rilevare la strada e il tubo ricevente riceve i segnali inviando la risposta. Quindi l’uscita fornisce livello basso (0); quando rileva linee nere, fornisce livello alto (1).
La porta integrata del sensore di tracciamento a 3 canali sulla 4WD Mecanum Robot Car è collegata alle porte di raccolta G, 5V, P10, P4 e P3 sulla scheda di espansione micro:bit, e viene controllata da P10, P4 e P3 del micro:bit. La coppia IR TCRT5000 sinistra sul sensore è controllata da P3, quella centrale da P4 e quella destra da P10.
Dopo aver posto un foglio bianco sul fondo della 4WD Mecanum Robot Car, ruoteremo i potenziometri sul sensore di tracciamento a 3 vie. Quando la spia sul modulo sensore è accesa, sollevare l’auto in modo che le due ruote del 4WD Mecanum Robot Car siano sollevate. L’altezza del foglio bianco è di circa 1,5 cm; quando la spia sul modulo sensore si spegne, regolare la sensibilità.
Nota che poiché la matrice a punti 5*5 usa le porte P3P4P6P7P10, dobbiamo disattivare la funzione della matrice a punti quando si usa il sensore di tracciamento della linea.
3. Preparazione
Inserire la scheda micro:bit nello slot del keyestudio 4WD Mecanum Robot Car V2.0
Inserire le batterie nel vano porta batterie
Portare l’interruttore di alimentazione su ON
Collegare il micro:bit al computer tramite un cavo USB
Aprire la versione offline di Mu.
4. Codice di prova
Aprire il software Mu e aprire il file “Line tracking detection.py” per importare il codice. È anche possibile inserire il codice nella finestra di modifica manualmente.
(Nota: Tutte le parole e i simboli in inglese devono essere scritti in inglese.)
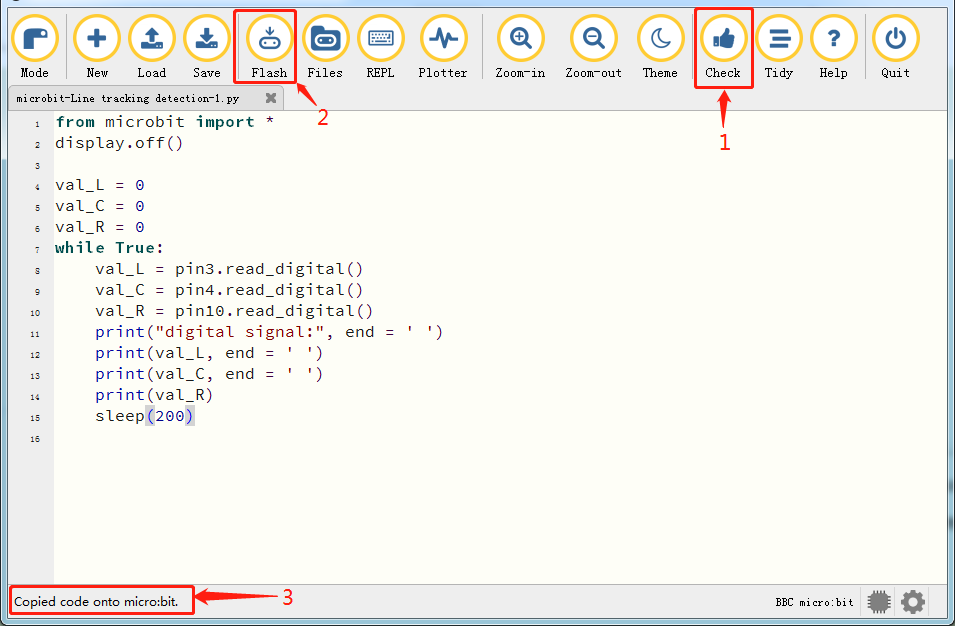
Fare clic su “Check” per verificare errori nel codice. Il programma presenterà errori se vengono mostrati sottolineature e cursori.
Se il codice è corretto, collegare il micro:bit al computer e fare clic su “Flash” per caricare il codice sulla scheda micro:bit.
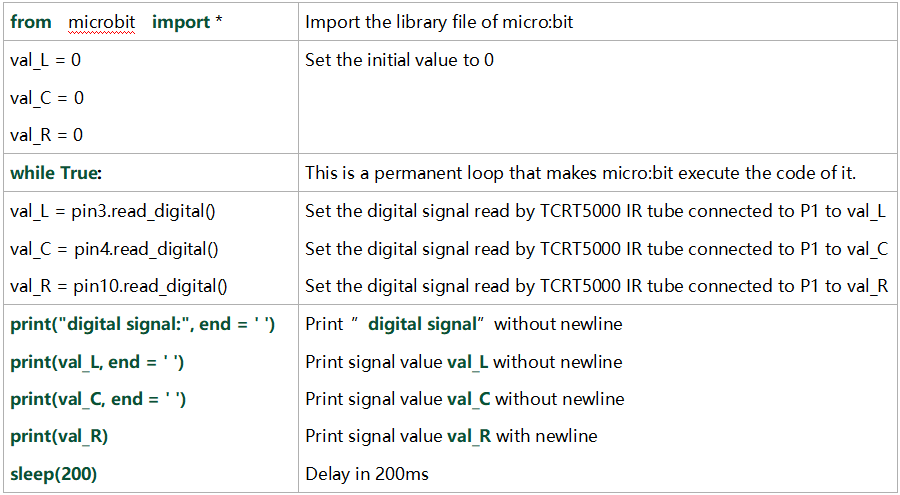
from microbit import *
display.off()
val_L = 0
val_C = 0
val_R = 0
while True:
val_L = pin3.read_digital()
val_C = pin4.read_digital()
val_R = pin10.read_digital()
print("digital signal:", end = ' ')
print(val_L, end = ' ')
print(val_C, end = ' ')
print(val_R)
sleep(200)
5. Risultato del test
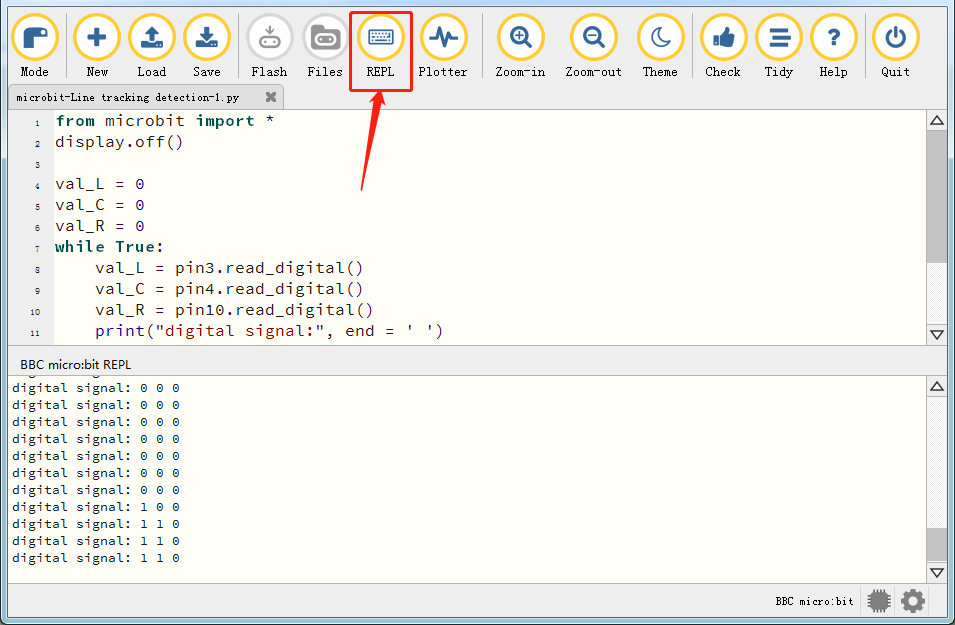
Dopo aver caricato correttamente il codice sulla scheda e senza scollegare il cavo USB, fare clic su “REPL” e poi premere il pulsante di reset.
Le letture rilevate dal tubo IR TCRT5000 sinistro verranno visualizzate nel monitor.
Quando il tubo IR TCRT5000 sinistro rileva un oggetto bianco, verrà mostrato 0 e il relativo indicatore sarà acceso; quando viene rilevato solo un oggetto nero, verrà visualizzato 1 e l’indicatore sarà spento, come mostrato di seguito:
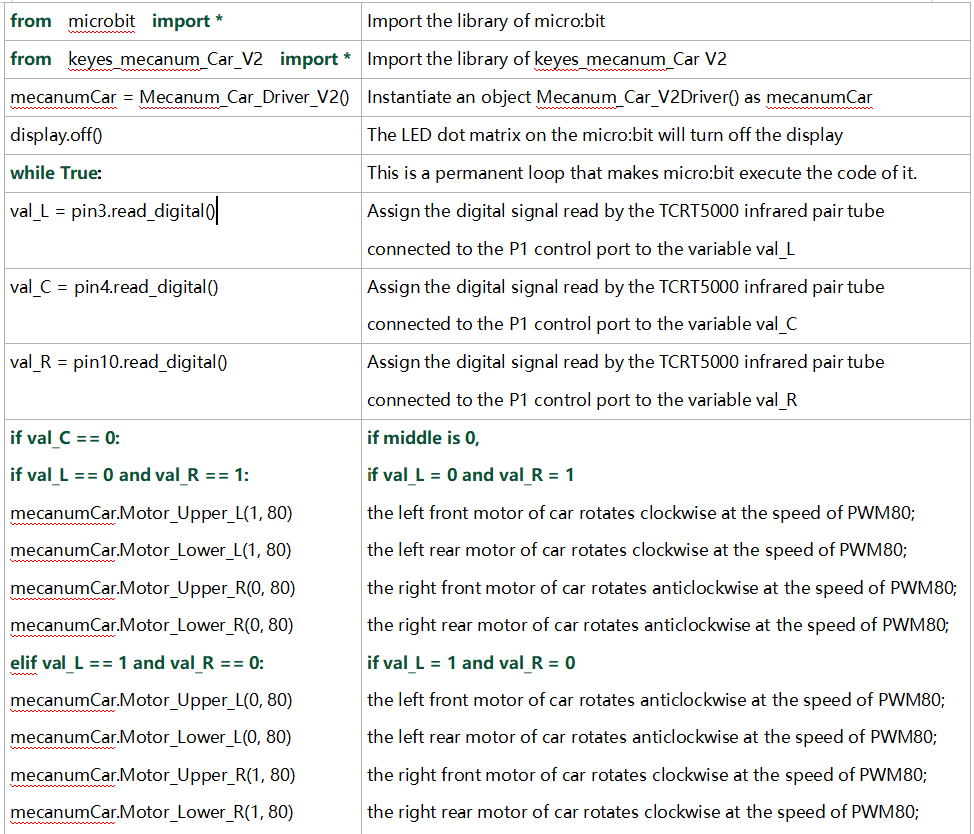
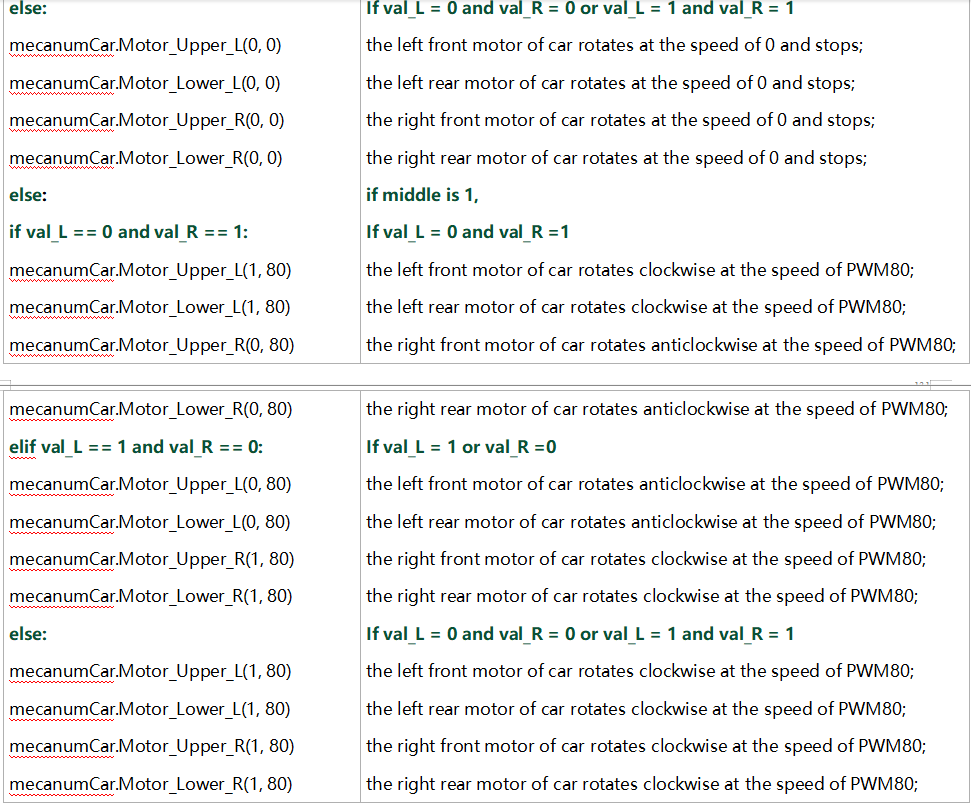
6. Spiegazione del codice
Progetto 17.2: Auto intelligente con tracciamento
1. Descrizione
In questa lezione combineremo un sensore di tracciamento della linea con i motori per realizzare un’auto intelligente che segua una linea.
La scheda micro:bit analizzerà i segnali e controllerà l’auto per implementare la funzione di tracciamento della linea.
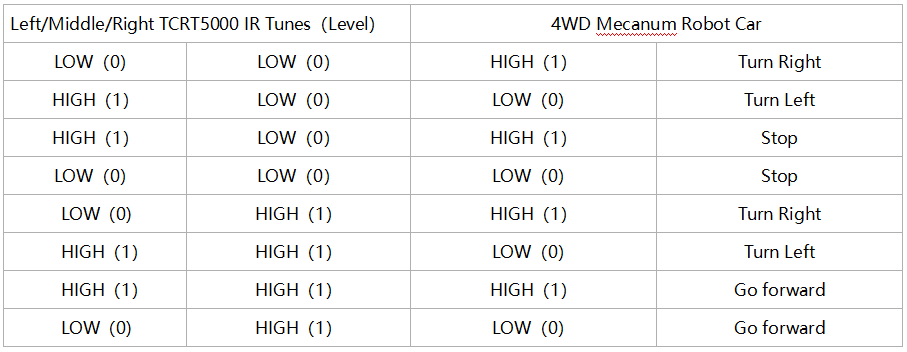
2. Principio di funzionamento
L’auto eseguirà movimenti differenti in base ai valori ricevuti dal sensore di tracciamento della linea a 3 canali.
3. Preparazione
Inserire la scheda micro:bit nello slot del keyestudio 4WD Mecanum Robot Car V2.0
Inserire le batterie nel vano porta batterie
Portare l’interruttore di alimentazione su ON
Collegare il micro:bit al computer tramite un cavo USB
Aprire la versione offline di Mu.
Avvertenza: Il sensore di tracciamento a 3 vie dovrebbe essere usato in un ambiente privo di interferenze infrarosse come la luce solare. La luce solare contiene molta luce invisibile, come infrarossi e ultravioletti. In un ambiente con forte luce solare il sensore a 3 vie potrebbe non funzionare correttamente.
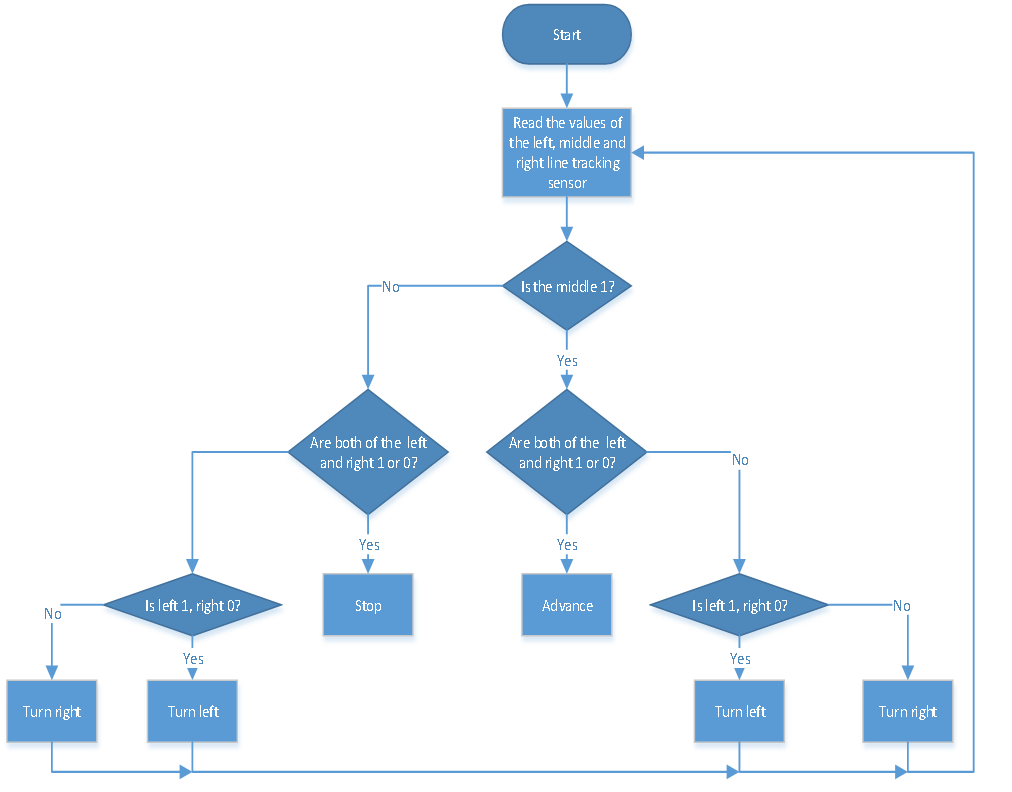
4. Diagramma di flusso
5. Codice di prova
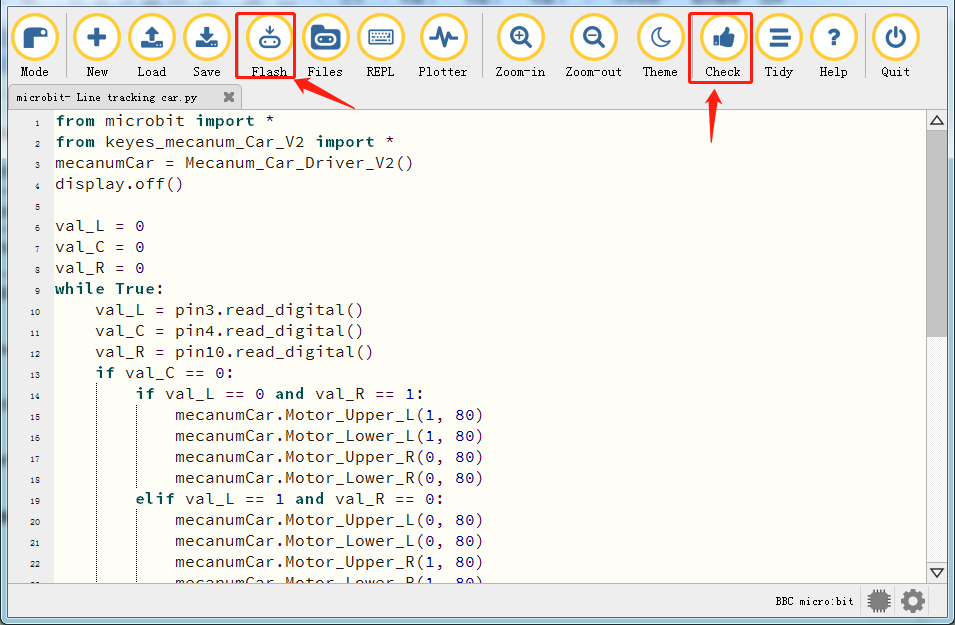
Aprire il software Mu e aprire il file “Line tracking car.py” per importare il codice. È anche possibile inserire il codice nella finestra di modifica manualmente.
(Nota: Tutte le parole e i simboli in inglese devono essere scritti in inglese.)
Fare clic su “Files” per importare il file libreria “keyes_mecanum_Car.py” nella micro:bit.
Fare clic su “Check” per verificare errori nel codice. Il programma presenterà errori se vengono mostrati sottolineature e cursori.
Se il codice è corretto, collegare il micro:bit al computer e fare clic su “Flash” per caricare il codice sulla scheda micro:bit.
from microbit import *
from keyes_mecanum_Car_V2 import *
mecanumCar = Mecanum_Car_Driver_V2()
display.off()
val_L = 0
val_C = 0
val_R = 0
while True:
val_L = pin3.read_digital()
val_C = pin4.read_digital()
val_R = pin10.read_digital()
if val_C == 0:
if val_L == 0 and val_R == 1:
mecanumCar.Motor_Upper_L(1, 80)
mecanumCar.Motor_Lower_L(1, 80)
mecanumCar.Motor_Upper_R(0, 80)
mecanumCar.Motor_Lower_R(0, 80)
elif val_L == 1 and val_R == 0:
mecanumCar.Motor_Upper_L(0, 80)
mecanumCar.Motor_Lower_L(0, 80)
mecanumCar.Motor_Upper_R(1, 80)
mecanumCar.Motor_Lower_R(1, 80)
else:
mecanumCar.Motor_Upper_L(0, 0)
mecanumCar.Motor_Lower_L(0, 0)
mecanumCar.Motor_Upper_R(0, 0)
mecanumCar.Motor_Lower_R(0, 0)
else :
if val_L == 0 and val_R == 1:
mecanumCar.Motor_Upper_L(1, 80)
mecanumCar.Motor_Lower_L(1, 80)
mecanumCar.Motor_Upper_R(0, 80)
mecanumCar.Motor_Lower_R(0, 80)
elif val_L == 1 and val_R == 0:
mecanumCar.Motor_Upper_L(0, 80)
mecanumCar.Motor_Lower_L(0, 80)
mecanumCar.Motor_Upper_R(1, 80)
mecanumCar.Motor_Lower_R(1, 80)
else:
mecanumCar.Motor_Upper_L(1, 80)
mecanumCar.Motor_Lower_L(1, 80)
mecanumCar.Motor_Upper_R(1, 80)
mecanumCar.Motor_Lower_R(1, 80)
6. Risultato del test
Dopo aver caricato correttamente il codice sulla scheda, fornire alimentazione esterna (portare l’interruttore DIP su ON) e premere il pulsante di reset sul micro:bit.
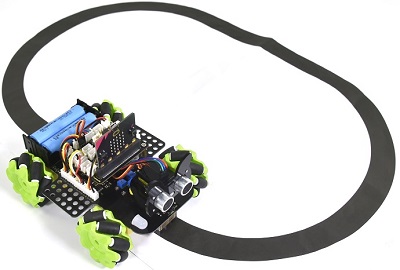
L’auto di tracciamento si muove in avanti seguendo la linea nera.
Nota: (1)La larghezza della linea nera dovrebbe essere uguale o maggiore della larghezza del sensore di tracciamento della linea durante il tracciamento.
(2)Evitare di testare l’auto intelligente sotto luce intensa.
7. Spiegazione del codice