4.3 Ball Recognition
4.3.1 Algorithm

It determines whether there is an orange ping-pong ball or a green tennis ball in the image. If yes, it returns their coordinates, size and label value.
4.3.2 Classification Label
Label ID |
Definition |
|---|---|
1 |
ping pong (orange) |
2 |
tennis (green) |
Ping pong:

Tennis:

4.3.3 Returned Values
When the controller acquires the recognition result, the algorithm will return the followings:
Parameters |
Definition |
|---|---|
kXValue |
label central coordinate x |
kYValue |
label central coordinate y |
kWidthValue |
label width w |
kHeightValue |
label height h |
kLabel |
label ID |
Code:
// Traverse all the detected labels
for (int i = 1; i <= obj_num; ++i) {
// Get detailed information about each object
int x = sengo.GetValue(VISION_TYPE, kXValue, i); // x-coordinate
int y = sengo.GetValue(VISION_TYPE, kYValue, i); // y-coordinate
int w = sengo.GetValue(VISION_TYPE, kWidthValue, i); // Width
int h = sengo.GetValue(VISION_TYPE, kHeightValue, i); // Height
int l = sengo.GetValue(VISION_TYPE, kLabel, i); // Label(object type)
// Output object information to the serial port
Serial.print(" obj");
Serial.print(i);
Serial.print(": ");
Serial.print("x=");
Serial.print(x);
Serial.print(",y=");
Serial.print(y);
Serial.print(",w=");
Serial.print(w);
Serial.print(",h=");
Serial.print(h);
Serial.print(",label=");
Serial.println(l);
}
4.3.4 Test Code
#include <Arduino.h> // Arduino library
#include <Sentry.h> // Sengo vision sensor library
// Create an alias Sengo for the Sengo1 type to simplify subsequent usage
typedef Sengo1 Sengo;
// Communication method (currently enabled I2C)
#define SENGO_I2C
// #define SENGO_UART // UART alternative options (annotated)
// Include the corresponding libraries according to the selected communication method
#ifdef SENGO_I2C
#include <Wire.h> // Arduino I2C library
#endif
#ifdef SENGO_UART
#include <SoftwareSerial.h> // Software serial port library (for non-hardware serial ports)
#define TX_PIN 11 // Define the serial port sending pin of the software
#define RX_PIN 10 // Define the serial port transmitting pin of the software
SoftwareSerial mySerial(RX_PIN, TX_PIN); // Create a software serial port object
#endif
// Define the visual recognition type as ball detection
#define VISION_TYPE Sengo::kVisionBall
Sengo sengo; // Create a Sengo sensor object
// Initialization
void setup() {
sentry_err_t err = SENTRY_OK; // Error status variable
// Initialize the serial port for debugging the output
Serial.begin(9600);
Serial.println("Waiting for sengo initialize...");
// Initialize the sensor according to the selected communication method
#ifdef SENGO_I2C
Wire.begin(); // Initialize the I2C bus
// Keep trying to connect until succeed
while (SENTRY_OK != sengo.begin(&Wire)) {
yield(); // Give up CPU time during the waiting period to prevent the watchdog from resetting
}
#endif // SENGO_I2C
#ifdef SENGO_UART
mySerial.begin(9600); // Initialize the software serial port
// Try to initialize the sensor until it succeeds
while (SENTRY_OK != sengo.begin(&mySerial)) {
yield();
}
#endif // SENGO_UART
Serial.println("Sengo begin Success."); // The sensor is initialized
// Set the visual recognition mode to ball detection
err = sengo.VisionBegin(VISION_TYPE);
Serial.print("sengo.VisionBegin(kVisionBall) ");
// Check if the settings are set and output the results
if (err) {
Serial.print("Error: 0x");
} else {
Serial.print("Success: 0x");
}
Serial.println(err, HEX); // Output the error code in hexadecimal format
}
// loop
void loop() {
// Obtain the number of detected objects
int obj_num = sengo.GetValue(VISION_TYPE, kStatus);
// If an object is detected
if (obj_num) {
Serial.print("Totally ");
Serial.print(obj_num);
Serial.println(" objects");
// Traverse all the detected labels
for (int i = 1; i <= obj_num; ++i) {
// Get detailed information about each object
int x = sengo.GetValue(VISION_TYPE, kXValue, i); // X-coordinate
int y = sengo.GetValue(VISION_TYPE, kYValue, i); // Y-coordinate
int w = sengo.GetValue(VISION_TYPE, kWidthValue, i); // Width
int h = sengo.GetValue(VISION_TYPE, kHeightValue, i); // Height
int l = sengo.GetValue(VISION_TYPE, kLabel, i); // Label
// Output object information to the serial port
Serial.print(" obj");
Serial.print(i);
Serial.print(": ");
Serial.print("x=");
Serial.print(x);
Serial.print(",y=");
Serial.print(y);
Serial.print(",w=");
Serial.print(w);
Serial.print(",h=");
Serial.print(h);
Serial.print(",label=");
Serial.println(l);
}
}
}
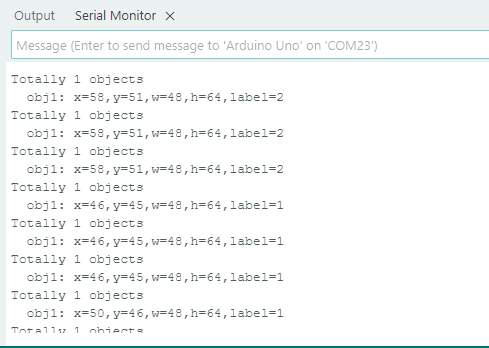
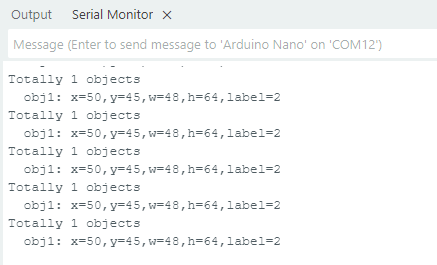
4.3.5 Test Result
After uploading the code, the module will detect the area captured by the camera. If an orange ping pong or a green tennis is detected, it will be recognized, and its coordinate x and y, width, height and the label value will be displayed on the serial monitor.