4.6 Body Detection
4.6.1 Algorithm
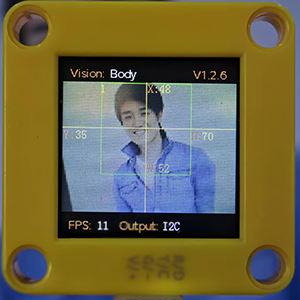
It determines whether there is a person in the image according to the outlines of the head and shoulders. If yes, it returns its coordinates and size.
4.6.2 Returned Values
When the controller acquires the recognition result, the algorithm will return the followings:
Parameter |
Definition |
|---|---|
kXValue |
Central coordinate x |
kYValue |
Central coordinate y |
kWidthValue |
Width w |
kHeightValue |
Height h |
Code:
// If a body is detected
if (obj_num) {
Serial.print("Totally ");
Serial.print(obj_num);
Serial.println(" persons detected");
// Traverse all the detected bodies
for (int i = 1; i <= obj_num; ++i) {
// Obtain detailed information about each human body
int x = sengo.GetValue(VISION_TYPE, kXValue, i); // x-coordinate (central position of the human body)
int y = sengo.GetValue(VISION_TYPE, kYValue, i); // y-coordinate (central position of the human body)
int w = sengo.GetValue(VISION_TYPE, kWidthValue, i); // The width of the human body detection box
int h = sengo.GetValue(VISION_TYPE, kHeightValue, i); // The height of the human body detection box
// Output human body information to the serial port
Serial.print(" Person ");
Serial.print(i);
Serial.print(": ");
Serial.print("x=");
Serial.print(x);
Serial.print(", y=");
Serial.print(y);
Serial.print(", width=");
Serial.print(w);
Serial.print(", height=");
Serial.print(h);
}
4.6.3 Tips of Body Algorithm
Compared with a human facing from the side and back, the detection results will be more accurate when the person faces Sengo1 head-on.
The detection results will be more accurate when the color of the background is simple and obviously difference from that of the body dress.
4.6.4 Test Code
#include <Arduino.h> // Arduino core library
#include <Sentry.h> // Sentry machine vision sensor library
// Create an alias Sengo for the Sengo1 type to simplify subsequent usage
typedef Sengo1 Sengo;
// Communication method (choose one).
#define SENGO_I2C
// #define SENGO_UART // UART serial communication solution (here annotated as disabled)
// Include the corresponding library according to the selected communication mode
#ifdef SENGO_I2C
#include <Wire.h> // Arduino I2C library
#endif
#ifdef SENGO_UART
#include <SoftwareSerial.h> // Soft serial library
#define TX_PIN 11 // Customize the TX pin
#define RX_PIN 10 // Customize the RX pin
SoftwareSerial mySerial(RX_PIN, TX_PIN); // Create a soft serial port object
#endif
// Define the type of visual recognition as human body detection
#define VISION_TYPE Sengo::kVisionBody
Sengo sengo; // Create a Sengo sensor object
// Initialization function - Runs once when the device starts up
void setup() {
sentry_err_t err = SENTRY_OK; // Define the error state variable and initialize it to be error-free
// Initialize the serial port for debugging the output
Serial.begin(9600);
Serial.println("Waiting for sengo initialize...");
// Initialize the sensor according to the selected communication mode
#ifdef SENGO_I2C
Wire.begin(); // Initialize the I2C bus
// Keep trying to connect until succeed
while (SENTRY_OK != sengo.begin(&Wire)) {
yield(); // Give up CPU time during the waiting period to prevent the watchdog from resetting
}
#endif // SENGO_I2C
#ifdef SENGO_UART
mySerial.begin(9600); // Initialize the soft serial port
// Keep trying to connect until succeed
while (SENTRY_OK != sengo.begin(&mySerial)) {
yield();
}
#endif // SENGO_UART
Serial.println("Sengo begin Success."); // sensor initialization
// Set the visual recognition mode to human body detection
err = sengo.VisionBegin(VISION_TYPE);
Serial.print("sengo.VisionBegin(kVisionBody) ");
// Check if the Settings are successful and output the results
if (err) {
Serial.print("Error: 0x");
} else {
Serial.print("Success: 0x");
}
Serial.println(err, HEX); // Print the error code in hexadecimal format
}
// The main loop function - runs repeatedly after initialization
void loop() {
// Obtain the number of detected human bodies
int obj_num = sengo.GetValue(VISION_TYPE, kStatus);
// If a body is detected
if (obj_num) {
Serial.print("Totally ");
Serial.print(obj_num);
Serial.println(" persons detected");
// Traverse all the detected bodies
for (int i = 1; i <= obj_num; ++i) {
// Obtain detailed information about each human body
int x = sengo.GetValue(VISION_TYPE, kXValue, i); // x-coordinate (central position of the human body)
int y = sengo.GetValue(VISION_TYPE, kYValue, i); // y-coordinate (central position of the human body)
int w = sengo.GetValue(VISION_TYPE, kWidthValue, i); // The width of the human body detection box
int h = sengo.GetValue(VISION_TYPE, kHeightValue, i); // The height of the human body detection box
// Output human body information to the serial port
Serial.print(" Person ");
Serial.print(i);
Serial.print(": ");
Serial.print("x=");
Serial.print(x);
Serial.print(", y=");
Serial.print(y);
Serial.print(", width=");
Serial.print(w);
Serial.print(", height=");
Serial.println(h);
}
}
}
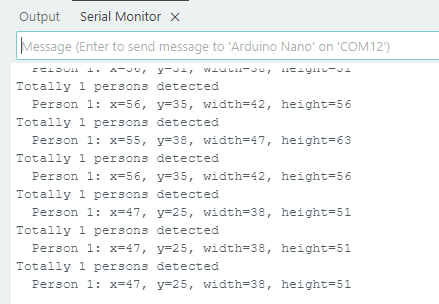
4.6.5 Test Result
After uploading the code, the AI vision module will scan the area captured by the camera. If there is a human body, it will be recognized and its coordinates, width and height will be printed on the monitor.