Projet 12 Voiture Intelligente Suiveuse Ultrasonique
1.Description
Dans ce projet, nous allons détecter la distance entre la voiture intelligente 4WD et les obstacles devant elle grâce à un capteur ultrasonique afin de piloter deux moteurs de manière à faire avancer la voiture et afficher un motif de visage souriant sur la matrice LED 8*8.
2.Diagramme de Flux
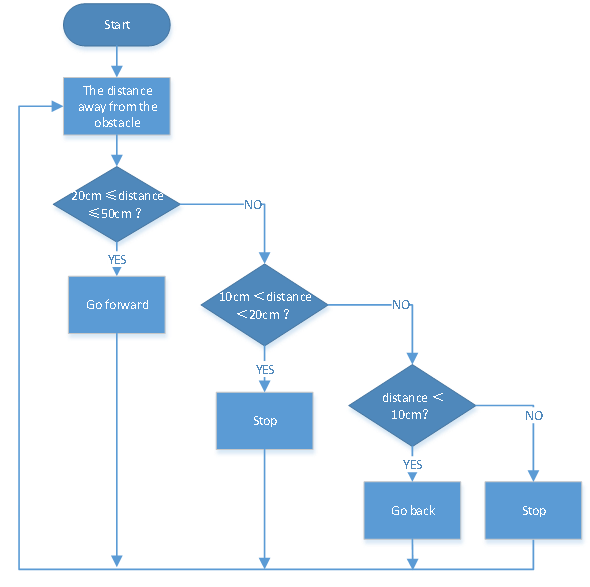
| Détection | Distance mesurée des obstacles devant | distance (unité : cm) |
| Paramétrage | La matrice LED 8*16 affiche un motif souriant. | |
| Positionner le servo à 90° | ||
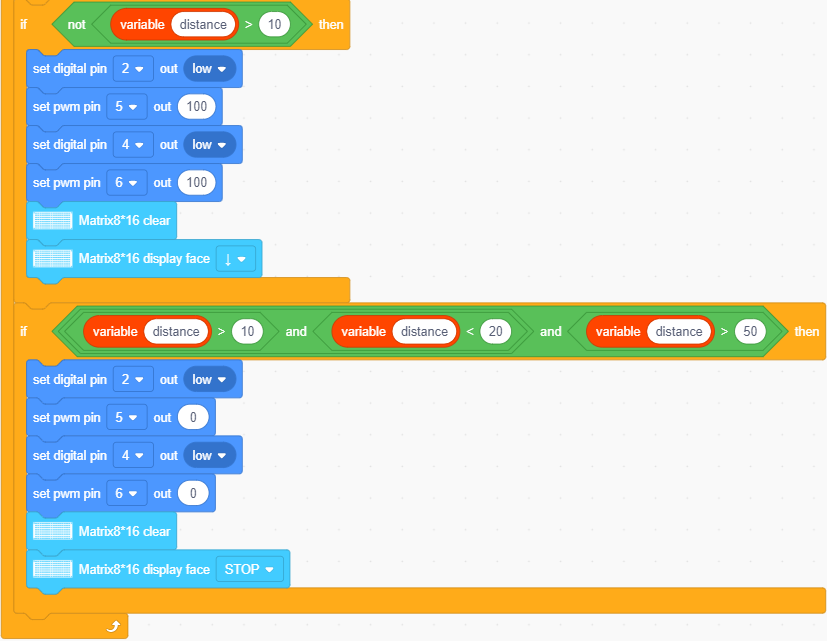
| Condition | distance≥20 et distance≤50 | |
| État | Avancer | |
| Condition | distance>10 et distance<20 | |
| distance>50 | ||
| Condition | arrêt | |
| Condition | distance≤10 | |
| Condition | Reculer |
3.Schéma de Câblage
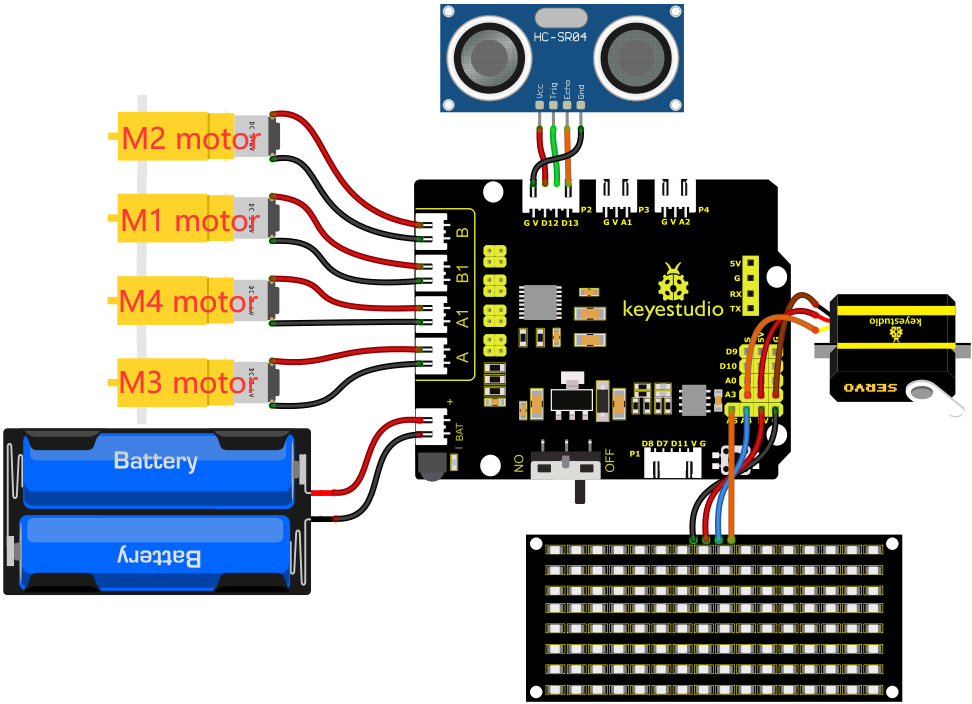
Câblage :
1). GND, VCC, SDA et SCL de la matrice LED 8*8 sont connectés à G (GND), V (VCC), A4 et A5 de la carte d’extension.
2). VCC, Trig, Echo et Gnd du capteur ultrasonique sont connectés à 5V (V), D12 (S), D13 (S) et Gnd (G).
3). Le servo est connecté à G, V et A3. Le fil marron est connecté à Gnd (G), le fil rouge à 5V (V) et le fil orange à A3.
4). L’alimentation est connectée au port BAT.
4.Code de Test
Avant d’écrire le code, il est nécessaire d’importer les fichiers de bibliothèque du capteur ultrasonique, de la matrice LED 8x16 et du servo. Les étapes spécifiques sont les suivantes :
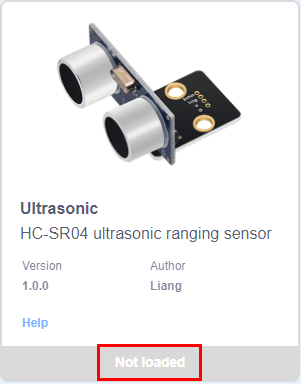
Cliquez sur  pour entrer dans l’interface de la bibliothèque d’extensions des capteurs/modules/composants, puis recherchez le capteur “Ultrasonic”
pour entrer dans l’interface de la bibliothèque d’extensions des capteurs/modules/composants, puis recherchez le capteur “Ultrasonic”  et cliquez dessus.
et cliquez dessus.
Ainsi, “Not loaded” change en “loaded”, indiquant que le capteur “Ultrasonic” a été ajouté avec succès.

Les fichiers de bibliothèque de la matrice LED 8x16 et du servo sont ajoutés de la même manière que pour le capteur ultrasonique.
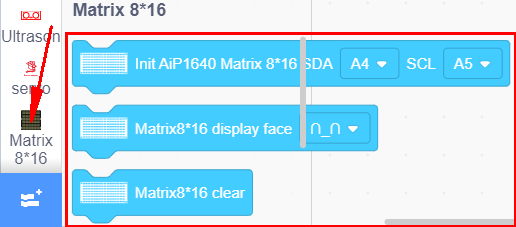
Cliquez sur  pour revenir à l’interface de l’éditeur de code, le bloc d’instructions du capteur “Ultrasonic”, du module “Matrix 8*16 Aip1640” et du composant “Servo” peut être vu dans la zone des modules.
pour revenir à l’interface de l’éditeur de code, le bloc d’instructions du capteur “Ultrasonic”, du module “Matrix 8*16 Aip1640” et du composant “Servo” peut être vu dans la zone des modules.
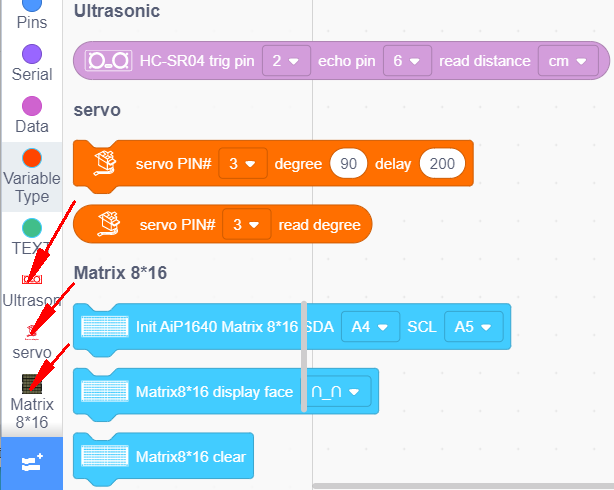
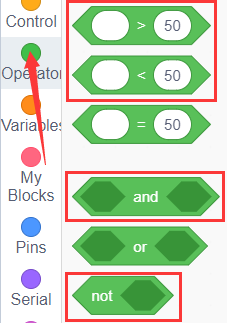
Vous pouvez glisser les blocs pour éditer. Les blocs listés ci-dessous sont pour votre référence
(1).
(2).
(3).
(4).
(5).
(6).
(7).
(8).
(9).
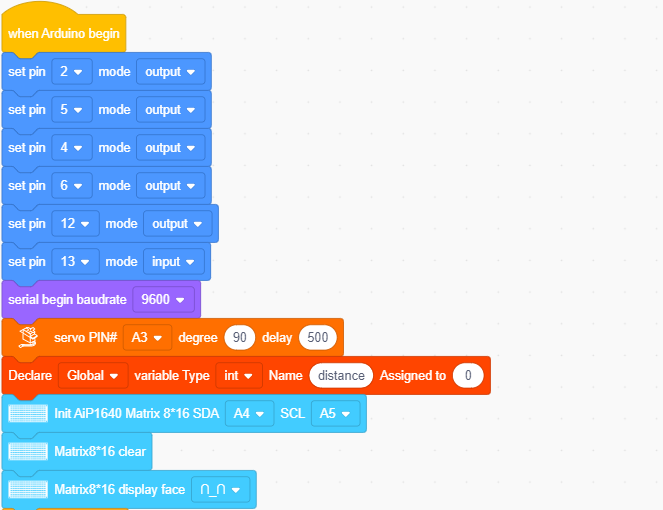
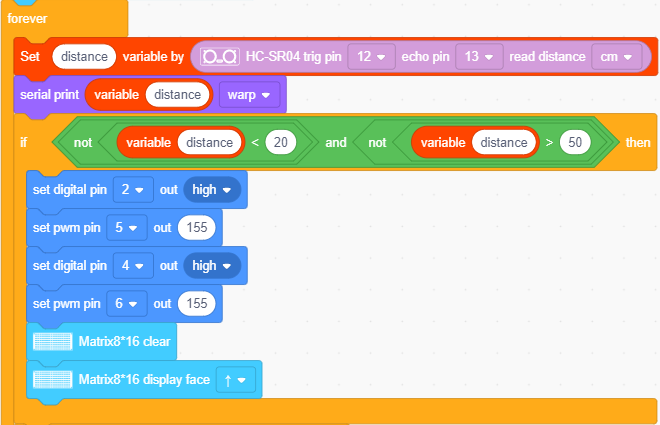
Code de Test Complet
5.Résultat du Test
Après avoir téléchargé avec succès le code sur la carte V4.0, connectez les câblages selon le schéma, alimentez la carte externe puis mettez l’interrupteur DIP sur ON. Positionnez le servo à 90°, la voiture intelligente se déplacera en fonction des obstacles et la matrice LED 8X16 affichera un “sourire”.