Projet 15 Voiture Intelligente Contrôlée par Bluetooth

1.Description
Nous avons appris les connaissances de base sur le Bluetooth. Dans cette leçon, nous allons fabriquer une voiture intelligente contrôlée par Bluetooth. Dans ce projet, nous considérons le téléphone mobile comme l’émetteur (hôte), et la voiture intelligente connectée au module Bluetooth BT24 (esclave) comme le récepteur, et utilisons l’application mobile pour contrôler la voiture intelligente via le Bluetooth.
2.Boutons de Contrôle de l’APP
Touche |
Fonction |
|---|---|
|
Jumeler le module Bluetooth DX-BT24 5.1 |
|
Déconnecter le Bluetooth |


Caractère de contrôle |
Fonction |
|
|---|---|---|
|
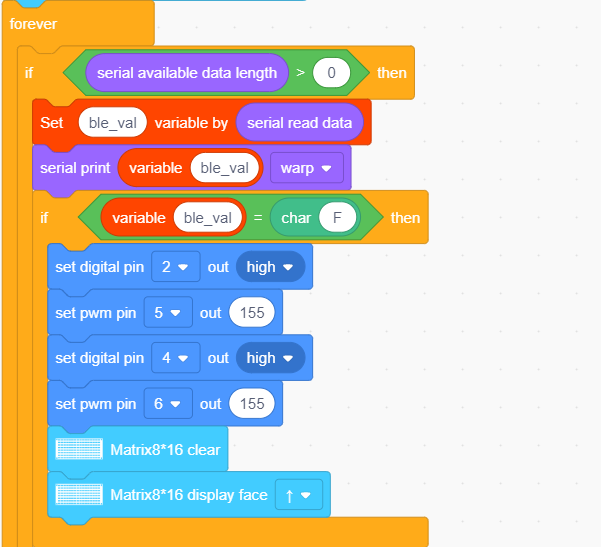
Appuyer : F |
Appuyer sur le bouton, la voiture avance ; |
|
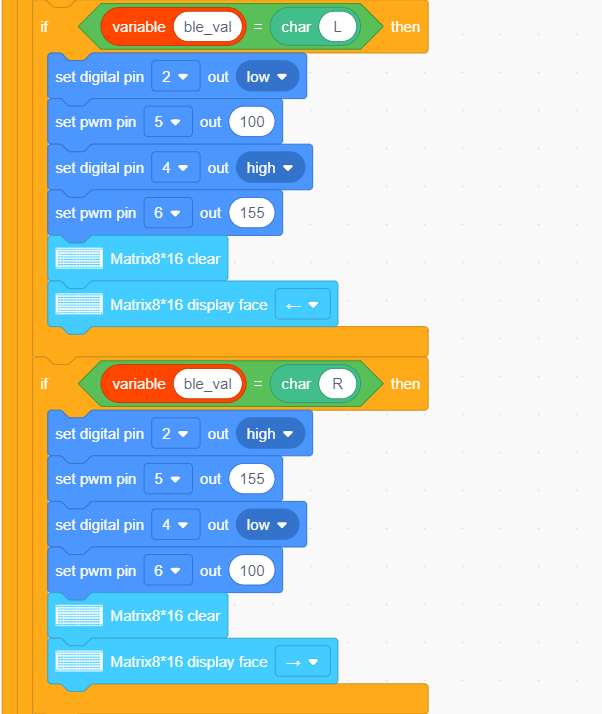
Appuyer : L |
Appuyer sur le bouton, la voiture tourne à gauche ; |
|
Appuyer : R |
Appuyer sur le bouton, la voiture tourne à droite ; |
|
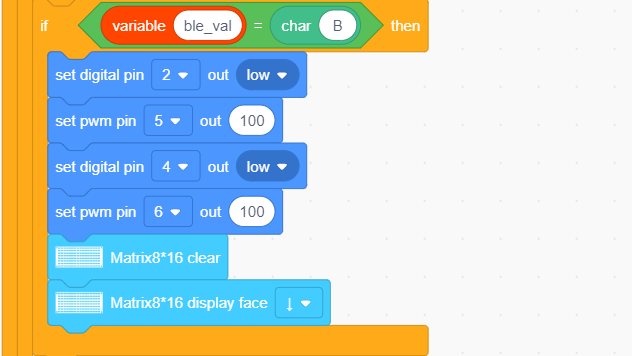
Appuyer : B |
Appuyer sur le bouton, la voiture recule ; |
|
Appuyer : “a” |
Cliquer pour accélérer (maximum : 255) |
|
Appuyer : “d” |
Cliquer pour ralentir (minimum : 0) |
|
Cliquer pour démarrer la fonction de détection de gravité du téléphone mobile : cliquer à nouveau pour quitter le contrôle par gravité |
|
|
Cliquer pour envoyer “X”, |
Démarrer la fonction de suivi de ligne ; |
|
Cliquer pour envoyer “Y”, |
Démarrer la fonction d’évitement ultrasonique ; |
|
Cliquer pour envoyer “U”, |
Démarrer la fonction de suivi ultrasonique ; |
|
Cliquer pour envoyer “G”, |
Démarrer la fonction de restriction ; |











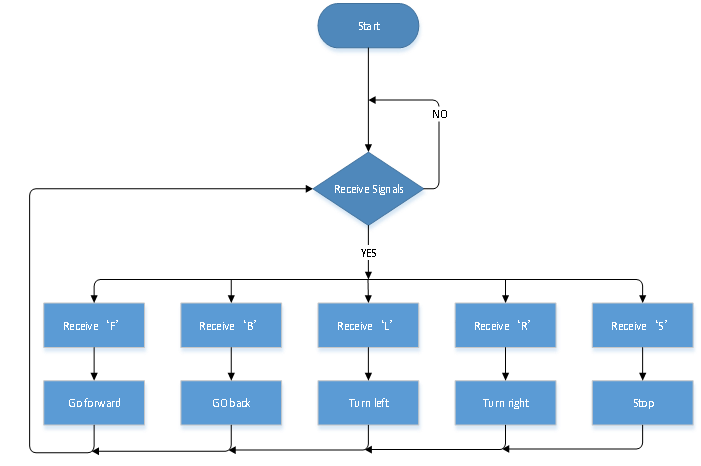
3.Diagramme de Flux
4.Schéma de Câblage
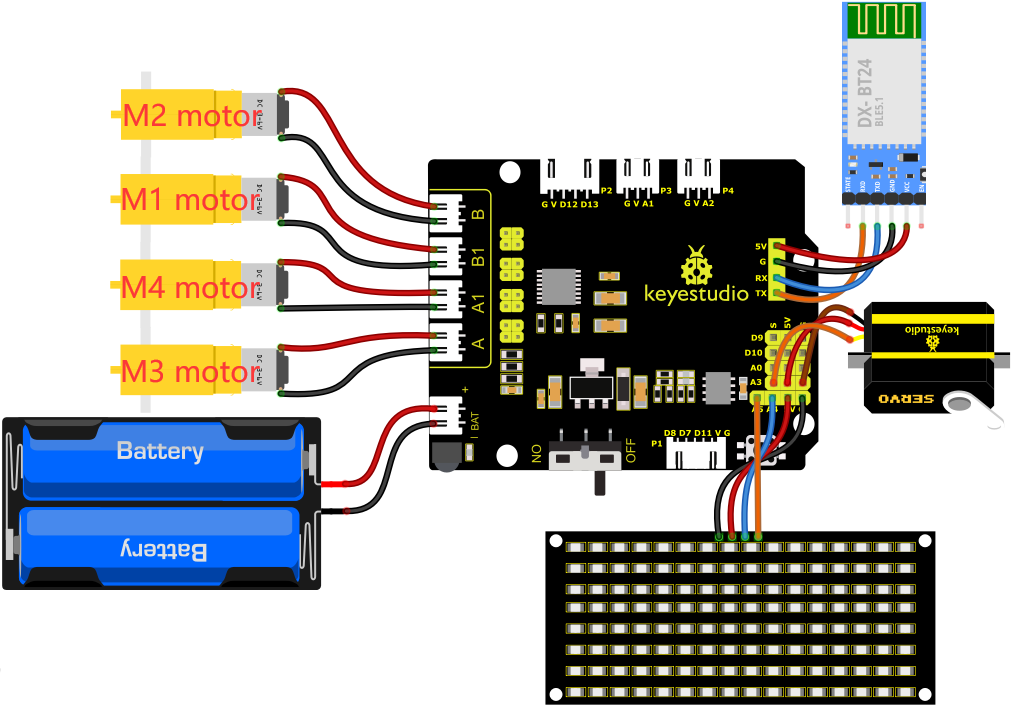
1). GND, VCC, SDA et SCL de la carte LED 8*8 sont connectés respectivement à G (GND), V (VCC), A4 et A5 de la carte d’extension.
2). Les broches RXD, TXD, GND et VCC du module Bluetooth sont respectivement connectées à TX, RX, G et 5V sur la carte d’extension du driver moteur 8833, tandis que les broches STATE et BRK du module Bluetooth n’ont pas besoin d’être connectées.
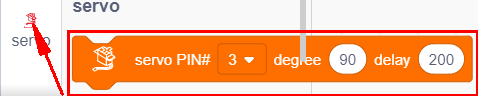
3). Le servo est connecté à G, V et A3. Le fil marron est connecté à Gnd (G), le fil rouge est connecté à 5V (V) et le fil orange est connecté à A3.
4). L’alimentation est connectée au port BAT
5.Code de Test
Avant d’écrire le code, il est nécessaire d’importer les fichiers de bibliothèque de la carte LED 8x16 et du servo. Les étapes spécifiques sont les suivantes :
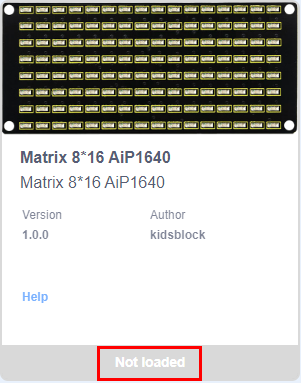
Cliquez sur  pour entrer dans l’interface de la bibliothèque d’extensions des capteurs/modules/composants, puis recherchez le module “Matrix 8*16 Aip1640”
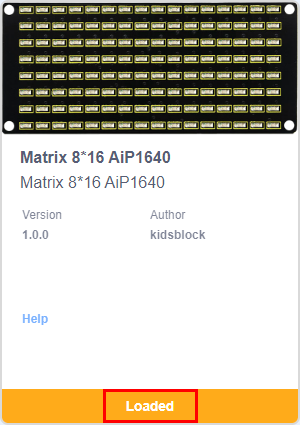
pour entrer dans l’interface de la bibliothèque d’extensions des capteurs/modules/composants, puis recherchez le module “Matrix 8*16 Aip1640”  et cliquez dessus. Ainsi, “Not loaded” change en “loaded”, indiquant que le module “Matrix 8*16 Aip1640” a été ajouté avec succès.
et cliquez dessus. Ainsi, “Not loaded” change en “loaded”, indiquant que le module “Matrix 8*16 Aip1640” a été ajouté avec succès.
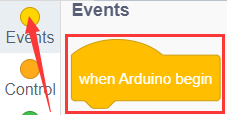
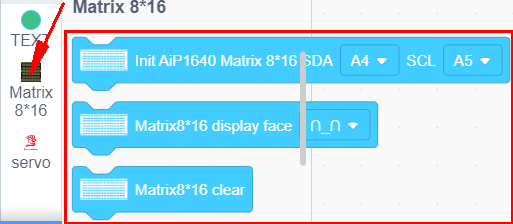
Cliquez sur  pour revenir à l’interface de l’éditeur de code, le bloc d’instructions du module “Matrix 8*16 Aip1640” ajouté et du composant “Servo” peut être vu dans la zone des modules.
pour revenir à l’interface de l’éditeur de code, le bloc d’instructions du module “Matrix 8*16 Aip1640” ajouté et du composant “Servo” peut être vu dans la zone des modules.
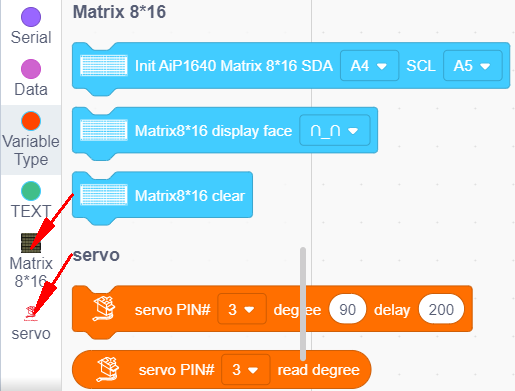
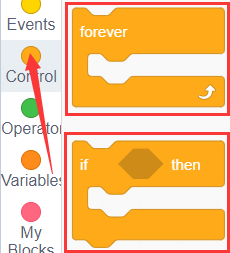
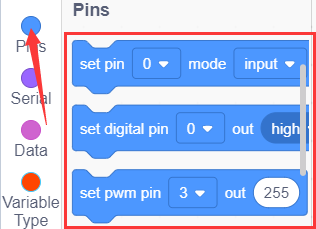
Vous pouvez faire glisser les blocs pour éditer. Les blocs listés ci-dessous sont pour votre référence.
(1).
(2).
(3).
(4).
(5).
(6).
(7).
(8).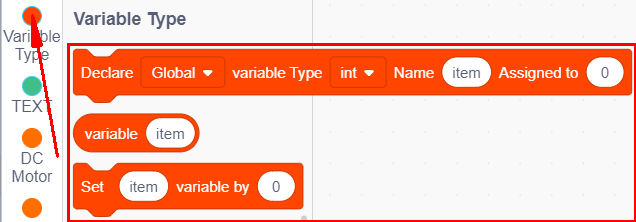
(9).
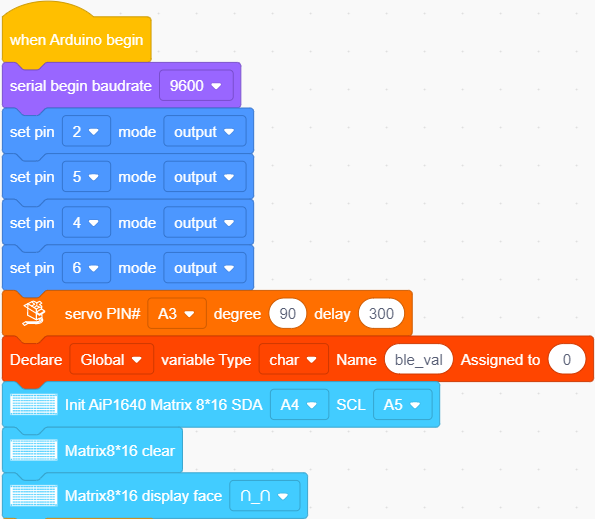
Code de test complet
Note : Avant de téléverser le code de test, vous devez retirer le module Bluetooth, sinon le code ne pourra pas être téléversé. Reconnectez le module Bluetooth après avoir téléversé le code avec succès.
6. Résultat du test
Après avoir téléversé avec succès le code sur la carte V4.0, connectez les câblages selon le schéma de câblage, alimentez l’alimentation externe puis mettez l’interrupteur DIP sur ON.
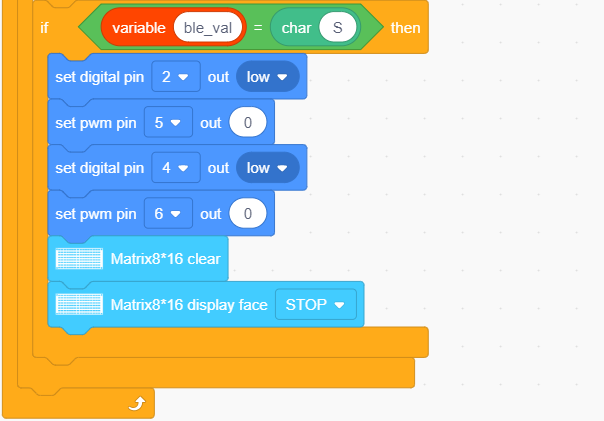
Insérez le module BT et ouvrez votre téléphone pour connecter le Bluetooth afin de contrôler la voiture intelligente. La voiture avancera, reculera, tournera à gauche et à droite et s’arrêtera. De plus, la carte LED 8*8 affichera les motifs correspondants.