5.12 Contrôle de la ferme intelligente par application
Attention : Ne laissez pas l’eau déborder des piscines en plastique lors des expériences. Le déversement d’eau sur d’autres capteurs peut provoquer un court-circuit ou rendre les modules hors service. Si les batteries sont mouillées, une explosion peut même se produire. Soyez extrêmement prudent ! Pour les jeunes utilisateurs, veuillez opérer avec vos parents. Utilisez des piles pour l’alimentation au lieu de simplement l’USB.
Ouvrez le code 5.12.1APP-Smart-Farm avec l’Arduino IDE.
#include <Arduino.h>
#ifdef ESP32
#include <WiFi.h>
#elif defined(ESP8266)
#include <ESP8266WiFi.h>
#endif
#include <dht11.h>
#include <ESP32Servo.h>
#include <LiquidCrystal_I2C.h>
//À afficher
#define DHT11PIN 17 //Broche du capteur de température et d'humidité
#define RAINWATERPIN 35 //Broche du capteur de vapeur
#define LIGHTPIN 34 //Broche de la photorésistance
#define WATERLEVELPIN 33 //Broche du capteur de niveau d'eau
#define SOILHUMIDITYPIN 32 //Broche du capteur d'humidité du sol
//À contrôler
#define LEDPIN 27 //Broche de la LED
#define RELAYPIN 25 //Broche du relais (pour contrôler la pompe à eau)
#define SERVOPIN 26 //Broche du servo
#define FANPIN1 19 //Broche IN+ du ventilateur
#define FANPIN2 18 //Broche IN- du ventilateur
#define BUZZERPIN 16 //Broche du buzzer
const char* ssid = "your_SSID";
const char* pwd = "your_PASSWORD";
//Initialiser LCD1602, 0x27 est l'adresse I2C
LiquidCrystal_I2C lcd(0x27, 16, 2);
WiFiServer server(80); //Initialiser le serveur wifi
dht11 DHT11; //Initialiser le capteur de température et d'humidité
Servo myservo; // créer un objet servo pour contrôler un servo
// 16 objets servo peuvent être créés sur l'ESP32
//Définir la variable comme valeurs détectées
String request;
String dataBuffer;
int Temperature; //Température
int Humidity; //Humidité
int SoilHumidity; //Humidité du sol
int Light; //Luminosité
int WaterLevel; //Niveau d'eau
int Rainwater; //Précipitations
void setup() {
Serial.begin(9600);
//Se connecter au wifi
WiFi.begin(ssid, pwd);
//Déterminer si connecté
Serial.println("Connexion au WiFi...");
while (WiFi.status() != WL_CONNECTED) {
delay(1000);
Serial.print(".");
}
delay(1000);
//Le moniteur série affiche le nom du wifi et l'adresse IP
Serial.println("Connecté au WiFi");
Serial.print("NOM WiFi:");
Serial.println(ssid);
Serial.print("IP:");
Serial.println(WiFi.localIP());
//Initialiser l'écran LCD
lcd.init();
// Allumer/éteindre le rétroéclairage (optionnel)
lcd.backlight();
//lcd.noBacklight();
lcd.clear();
//Définir la position du curseur
lcd.setCursor(0, 0);
//Affichage LCD
lcd.print("IP:");
//Définir la position du curseur
lcd.setCursor(0, 1);
//Affichage LCD
lcd.print(WiFi.localIP());
//définir le mode des broches
pinMode(LEDPIN, OUTPUT);
pinMode(RAINWATERPIN, INPUT);
pinMode(LIGHTPIN, INPUT);
pinMode(SOILHUMIDITYPIN, INPUT);
pinMode(WATERLEVELPIN, INPUT);
pinMode(RELAYPIN, OUTPUT);
pinMode(FANPIN1, OUTPUT);
pinMode(FANPIN2, OUTPUT);
pinMode(BUZZERPIN, OUTPUT);
delay(1000);
// attache le servo sur la broche 26 à l'objet servo
myservo.attach(SERVOPIN);
myservo.write(160);
//Démarrer le serveur
server.begin();
// Configurer le canal LEDC
ledcAttachChannel(BUZZERPIN, 1000, 8, 4);
}
cpp
void loop() {
//Vérifier si un client est connecté au serveur web
//Lorsque le client est connecté au serveur, "server.available()" renvoie un objet WiFiClient pour la communication côté client.
WiFiClient client = server.available();
if (client) {
Serial.println("Nouveau client connecté");
while (client.connected()) {
//Déterminer si le serveur envoie des données
if (client.available()) {
request = client.readStringUntil('s');
Serial.print("Message reçu : ");
Serial.println(request);
}
//Acquérir toutes les données des capteurs
getSensorsData();
//Mettre toutes les données dans "dataBuffer"
dataBuffer = "";
dataBuffer += String(Temperature, HEX);
dataBuffer += String(Humidity, HEX);
dataBuffer += dataHandle(SoilHumidity);
dataBuffer += dataHandle(Light);
dataBuffer += dataHandle(WaterLevel);
dataBuffer += dataHandle(Rainwater);
//Envoyer les données au serveur, transmettre à l'APP
client.print(dataBuffer);
delay(500);
//LED
if (request == "a") {
digitalWrite(LEDPIN, HIGH);
} else if (request == "A") {
digitalWrite(LEDPIN, LOW);
}
//Irrigation
else if (request == "b") {
digitalWrite(RELAYPIN, HIGH);
delay(400); //Délai d'irrigation
digitalWrite(RELAYPIN, LOW);
delay(650);
}
//Ventilateur
else if (request == "c") {
delay(800);
digitalWrite(FANPIN1, HIGH);
digitalWrite(FANPIN2, LOW);
delay(200);
} else if (request == "C") {
digitalWrite(FANPIN1, LOW);
digitalWrite(FANPIN2, LOW);
}
//Boîte d'alimentation
else if (request == "d") {
//Le servo tourne à 80°, ouvre la boîte d'alimentation
myservo.write(80);
delay(500);
} else if (request == "D") {
//Le servo tourne à 160°, ferme la boîte d'alimentation
myservo.write(160);
}
//Buzzer
else if (request == "e") {
ledcWriteTone(BUZZERPIN, 262);
delay(800);
ledcWriteTone(BUZZERPIN, 0);
delay(100);
}
request = "";
}
Serial.println("Client déconnecté");
}
}
void getSensorsData() {
//Acquérir les données
int chk = DHT11.read(DHT11PIN);
//Capteur de vapeur
Rainwater = analogRead(RAINWATERPIN);
//Photorésistance
Light = analogRead(LIGHTPIN);
//Capteur d'humidité du sol
SoilHumidity = analogRead(SOILHUMIDITYPIN) * 1.8;
//Capteur de niveau d'eau
WaterLevel = analogRead(WATERLEVELPIN) * 1.8;
//Température
Temperature = DHT11.temperature;
//Humidité
Humidity = DHT11.humidity;
}
//Convertir les données en pourcentage
String dataHandle(int data) {
// Convertir les valeurs analogiques en pourcentage
int percentage = (data / 4095.0) * 100;
// Si le pourcentage converti est supérieur à 100, afficher 100.
percentage = percentage > 100 ? 100 : percentage;
// Six caractères stockent les chaînes hexadécimales, un caractère est comme terminateur
char hexString[3];
// Convertir les valeurs hexadécimales en chaînes hexadécimales à 6 chiffres, ajouter des zéros non significatifs : 0 est 00, 1 est 01...
sprintf(hexString, "%02X", percentage);
return hexString;
}
Changez your_SSID dans le code par le nom de votre wifi, et your_PASSWORD par le mot de passe wifi. Ensuite, téléchargez le code.
const char* ssid = "your_SSID";
const char* password = "your_PASSWORD";
Choisissez la carte ESP32 Dev Module et le port COM, puis téléchargez le code.

Télécharger l’APP
Pour Android :
Méthode 1 : Recherchez « IOT Farm » dans Google Play et téléchargez-la.
Pour iOS :
Recherchez IOT farm dans l’App Store et appuyez pour télécharger.
La page d’accueil de l’application
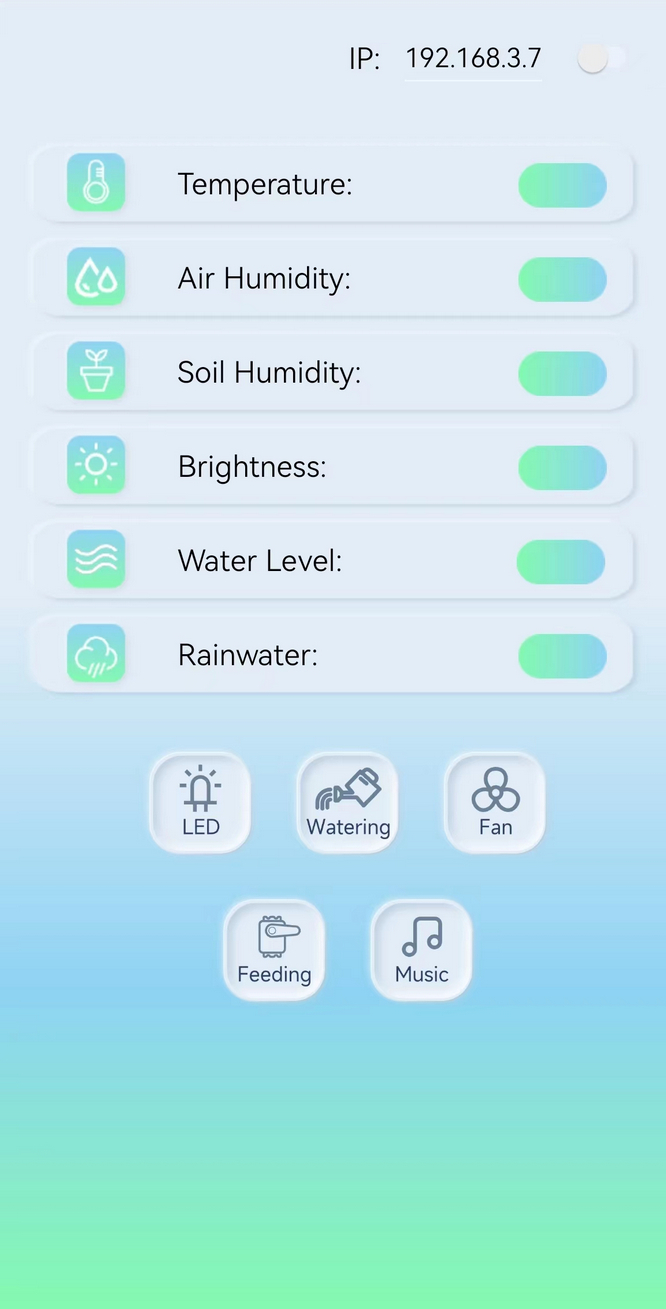
Description des fonctions de l’application
Après avoir téléchargé le code, connectez le téléphone au même WIFI que l’ESP32, il vous suffit d’entrer l’adresse IP dans le coin supérieur droit pour vous connecter. Remarque : Nécessite un WIFI 2,4 GHz, pas 5G.

Affiche la valeur de la température de la ferme en temps réel.

Affiche la valeur de l’humidité de l’air de la ferme en temps réel.

Affiche la valeur de l’humidité du sol de la ferme en temps réel.

Affiche la valeur de la luminosité du soleil de la ferme en temps réel.

Affiche le niveau d’eau de la ferme en temps réel.

Affiche la valeur analogique des précipitations de la ferme en temps réel.

Contrôle la LED.

Contrôle l’irrigation via la pompe à eau.
Contrôle le ventilateur pour ajuster la température.
Contrôle le servomoteur pour ouvrir ou fermer la boîte d’alimentation.
Contrôle le buzzer pour émettre un son.