5.6 Système d’alimentation intelligent
5.6.1 Porte de la cabine d’alimentation
Ouvrez le code 5.6.1Servo avec Arduino IDE.
#include <ESP32Servo.h> //Import the library of servo
Servo myservo; // create servo object to control a servo
// 16 servo objects can be created on the ESP32
int pos = 0; // variable to store the servo position
// Recommended PWM GPIO pins on the ESP32 include 2,4,12-19,21-23,25-27,32-33
int servoPin = 26;
void setup() {
Serial.begin(9600);
myservo.attach(servoPin); // attaches the servo on pin 26 to the servo object
myservo.write(180);
delay(2000);
}
void loop() {
for (pos = 80; pos <= 179; pos += 1) { // goes from 0 degrees to 80 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for (pos = 180; pos >= 81; pos -= 1) { // goes from 80 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
Choisissez la carte ESP32 Dev Module et le port COM, puis téléchargez le code.

Résultat du test :
La porte de la cabine d’alimentation s’ouvre lentement puis se ferme.
NOTE : Le servomoteur SG90 peut pivoter de 180°. Comme la boîte d’alimentation est petite, une rotation de 100° est suffisante pour fermer complètement la boîte.
80° : complètement ouvert
120° : à moitié ouvert
180° : fermé
ATTENTION
Ne mettez pas vos doigts dans la boîte pour éviter de vous pincer !
Ne bloquez pas la porte avec quelque chose pour éviter d’endommager le servomoteur !
La porte est contrôlée par un servomoteur.
Structure interne :
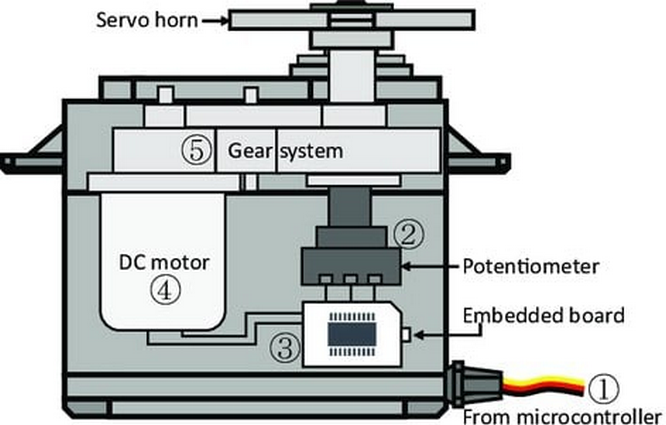
① Signal (S) : Il reçoit le signal de commande du microcontrôleur.
② Potentiomètre : la partie rétroaction du servomoteur. Il mesure la position de l’arbre de sortie.
③ Carte embarquée (contrôleur interne) : le cœur du servomoteur. Il traite le signal de commande externe et le signal de rétroaction de position et pilote le servomoteur.
④ Moteur CC : la partie exécution. Il produit la vitesse, le couple et la position.
⑤ Système d’engrenages : Il met à l’échelle les sorties du moteur à l’angle de sortie final selon un certain rapport de transmission.
Piloter le servomoteur :
Le signal (S) reçoit le PWM pour contrôler la sortie du servomoteur, et la position de l’arbre de sortie dépend directement du rapport cyclique du PWM.
Par exemple :
A. Si nous envoyons un signal avec une largeur d’impulsion de 1,5 ms au servomoteur, son arbre (corne) tournera à la position médiane (90°) ;
B. Si la largeur d’impulsion = 0,5 ms, l’arbre tourne à son minimum (0°) ;
C. Si la largeur d’impulsion = 2,5 ms, l’arbre tourne à son maximum (180°).
NOTE : L’angle maximal varie selon les types de servomoteurs. Certains sont de 170° tandis que d’autres ne sont que de 90°. Malgré cela, les servomoteurs se déplaceront généralement de moitié (du maximum) s’ils reçoivent un signal avec une largeur d’impulsion de 1,5 ms.
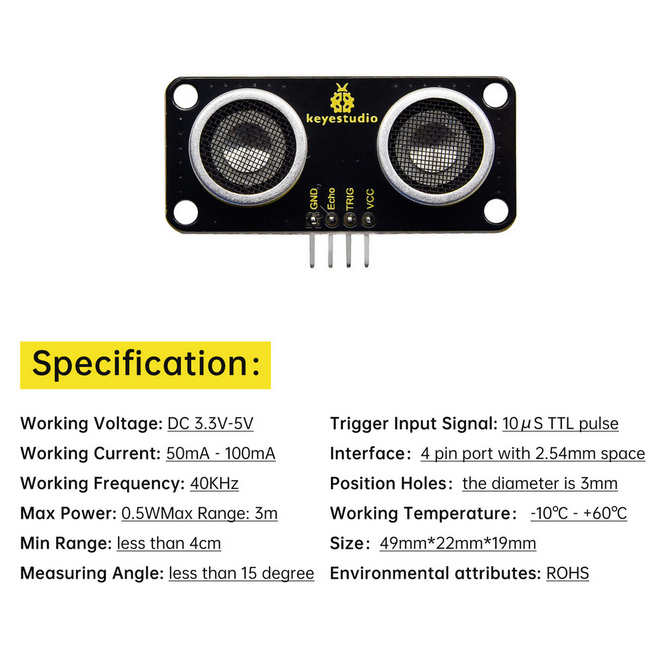
5.6.2 Capteur à ultrasons
Ouvrez le code 5.6.2 Ultrasonic-Sensor avec Arduino IDE.
#define Trigpin 12 //connect trig to io12
#define Echopin 13 //connect echo to io13
int duration,distance;
void setup(){
Serial.begin(9600); //Set the baud rate to 9600
pinMode(Trigpin,OUTPUT); //set trig pin to output mode
pinMode(Echopin,INPUT); //set echo pin to input mode
}
void loop(){
digitalWrite(Trigpin,LOW);
delayMicroseconds(2);
digitalWrite(Trigpin,HIGH);
delayMicroseconds(10); //Trigger the trig pin via a high level lasting at least 10us
digitalWrite(Trigpin,LOW);
duration = pulseIn(Echopin,HIGH); //the time of high level at echo pin
distance = duration/58; //convert into distance(cm)
delay(50);
Serial.print("distance:"); //Serial monitor prints the value
Serial.print(distance);
Serial.println("cm");
}
Choisissez la carte ESP32 Dev Module et le port COM, puis téléchargez le code.
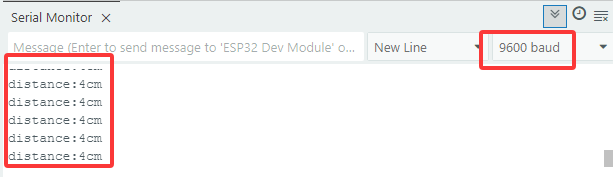
Résultat du test :
Dans ce kit, la plage de détection est comprise entre 3 et 8 cm.
Ouvrez le moniteur série et réglez le débit en bauds sur 9600, le moniteur série affichera la distance entre le module à ultrasons et l’obstacle en face.
5.6.3 Système d’alimentation intelligent
Ouvrez le code 5.6.3Intelligent-Feeding-System avec Arduino IDE.
#include <ESP32Servo.h> //Import the library of servo on ESP32 board
Servo myservo; // create servo object to control a servo
// 16 servo objects can be created on the ESP32
#define TrigPin 12 //connect trig to D12
#define EchoPin 13 //connect echo to D13
#define ServoPin 26
int duration,distance;
void setup(){
Serial.begin(9600); //Set the baud rate to 9600
pinMode(TrigPin,OUTPUT); //set trig pin to output mode
pinMode(EchoPin,INPUT); //Set echo pin to input mode
myservo.attach(ServoPin); // attaches the servo on pin 26 to the servo object
}
void loop(){
Serial.println(getDistance());
//When the distance is detected within 2~7cm, open the feeding box. Or else, close.
if (getDistance() >= 2 && 7 >= getDistance()) {
//Servo rotates to 80° to open the box
myservo.write(80);
delay(500);
}
else{
myservo.write(180);
delay(500);
}
}
//Put the gotten distance in a function
float getDistance() {
digitalWrite(TrigPin,LOW);
delayMicroseconds(2);
digitalWrite(TrigPin,HIGH);
delayMicroseconds(10); //Trigger the trig pin via a high level lasting at least 10us
digitalWrite(TrigPin,LOW);
duration = pulseIn(EchoPin,HIGH); //the time of high level at echo pin
distance = duration/58; //convert into distance(cm)
delay(50);
return distance;
}
Choisissez la carte ESP32 Dev Module et le port COM, puis téléchargez le code.
Résultat du test :
El sistema de alimentación inteligente alimenta a las aves de corral mediante un módulo ultrasónico y un servomotor. El primero detecta la distancia a los animales, mientras que el segundo controla la apertura y el cierre del comedero. Cuando se detecta una mascota cerca del comedero, el servomotor lo abre para alimentarla.