Project 11 IR Remote Control Smart Car

1.Description
In this project, we will work to control the car using an IR remote control.
2.Flow Diagram
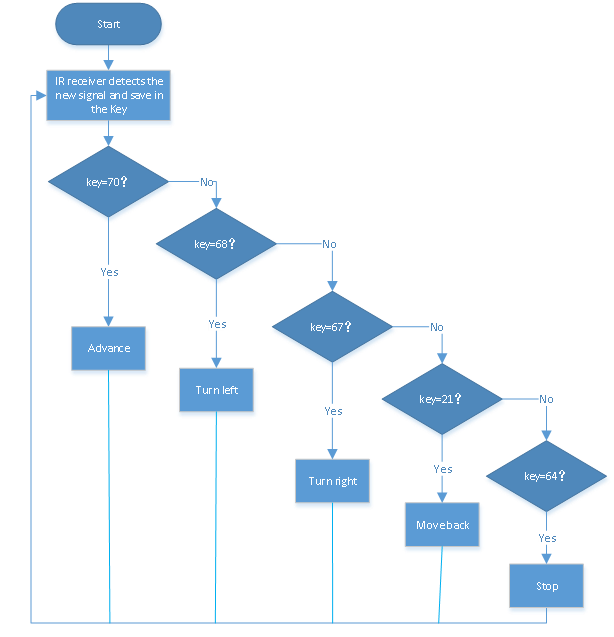
3.Test Code
#include "MecanumCar_v2.h"
mecanumCar mecanumCar(20, 21); //sda-->20,scl-->21
#include "ir.h"
IR IRreceive(6);//IR receiver is connected to GP6
void setup()
{
mecanumCar.Init(); //Initialize the seven-color LED and motor drive
}
void loop()
{
int key = IRreceive.getKey();
if (key != -1)
{
Serial.println(key);
switch (key)
{
case 64: mecanumCar.Stop(); break; //Stop
case 70: mecanumCar.Advance(); break; //Advance
case 21: mecanumCar.Back(); break; //Move back
case 68: mecanumCar.Turn_Left(); break; //Turn left
case 67: mecanumCar.Turn_Right(); break; //Turn right
}
}
}
4.Test Result
Uploading the test code and powering up. When we press the button on the remote control, the car moves forward, then
on the remote control, the car moves forward, then  , the car turns left,
, the car turns left,  ,the car moves back,
,the car moves back, , the car turns right,
, the car turns right, , the car stops.
, the car stops.
5.Code Explanation
switch (key) |
The switch statement, used with case, executes the statement after case when the variable in parentheses is the value after case |
|---|---|
case 64: mecanumCar.Stop(); |
The car will stop |
case 70: mecanumCar.Advance(); |
The car will go forward |
case 21: mecanumCar.Back(); |
The car will move back |
case 68: mecanumCar.Turn_Left(); |
The car will turn left |
case 67: mecanumCar.Turn_Right(); |
The car will turn right |