Project 11 IR Remote Control Smart Car

1.Description
In this project, we will work to control the car using an IR remote control.
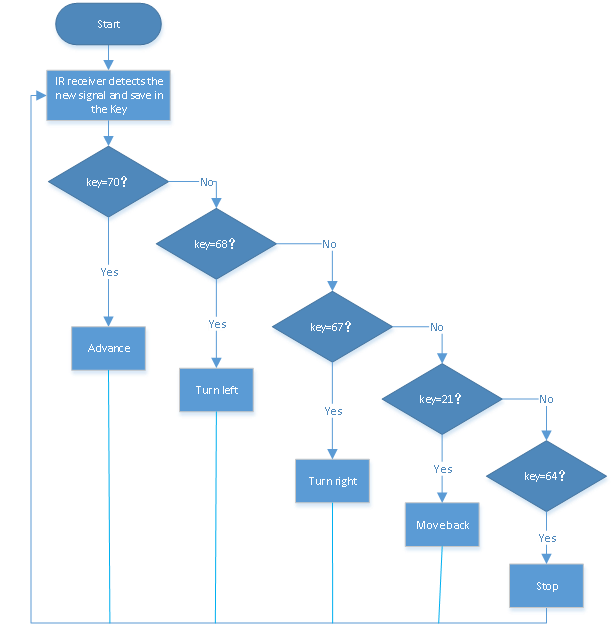
2.Flow Diagram
3.Test Code
from machine import Pin,I2C
import mecanumCar_v2
import time
i2c = I2C(0, sda = Pin(20), scl = Pin(21), freq = 400000) #iic0 sda-->20,scl-->21
mecanumCar = mecanumCar_v2.Driver(i2c) #Create a driver instance for the car
ird = Pin(6,Pin.IN) #IR receiver pin interface is GPIO6
#IR decoder dictionary
act = {"1": "LLLLLLLLHHHHHHHHLHHLHLLLHLLHLHHH","2": "LLLLLLLLHHHHHHHHHLLHHLLLLHHLLHHH","3": "LLLLLLLLHHHHHHHHHLHHLLLLLHLLHHHH",
"4": "LLLLLLLLHHHHHHHHLLHHLLLLHHLLHHHH","5": "LLLLLLLLHHHHHHHHLLLHHLLLHHHLLHHH","6": "LLLLLLLLHHHHHHHHLHHHHLHLHLLLLHLH",
"7": "LLLLLLLLHHHHHHHHLLLHLLLLHHHLHHHH","8": "LLLLLLLLHHHHHHHHLLHHHLLLHHLLLHHH","9": "LLLLLLLLHHHHHHHHLHLHHLHLHLHLLHLH",
"0": "LLLLLLLLHHHHHHHHLHLLHLHLHLHHLHLH","Up": "LLLLLLLLHHHHHHHHLHHLLLHLHLLHHHLH","Down": "LLLLLLLLHHHHHHHHHLHLHLLLLHLHLHHH",
"Left": "LLLLLLLLHHHHHHHHLLHLLLHLHHLHHHLH","Right": "LLLLLLLLHHHHHHHHHHLLLLHLLLHHHHLH","Ok": "LLLLLLLLHHHHHHHHLLLLLLHLHHHHHHLH",
"*": "LLLLLLLLHHHHHHHHLHLLLLHLHLHHHHLH","#": "LLLLLLLLHHHHHHHHLHLHLLHLHLHLHHLH"}
def read_ircode(ird):
wait = 1
complete = 0
seq0 = []
seq1 = []
while wait == 1:
if ird.value() == 0:
wait = 0
while wait == 0 and complete == 0:
start = time.ticks_us()
while ird.value() == 0:
ms1 = time.ticks_us()
diff = time.ticks_diff(ms1,start)
seq0.append(diff)
while ird.value() == 1 and complete == 0:
ms2 = time.ticks_us()
diff = time.ticks_diff(ms2,ms1)
if diff > 10000:
complete = 1
seq1.append(diff)
code = ""
for val in seq1:
if val < 2000:
if val < 700:
code += "L"
else:
code += "H"
# print(code)
command = ""
for k,v in act.items():
if code == v:
command = k
if command == "":
command = code
return command
while True:
command = read_ircode(ird)
if command == "Up":
mecanumCar.Advance()
elif command == "Down":
mecanumCar.Back()
elif command == "Left":
mecanumCar.Turn_Left()
elif command == "Right":
mecanumCar.Turn_Right()
elif command == "Ok":
mecanumCar.stop()
4.Test Result
Uploading the test code and powering up. When we press the button on the remote control, the car moves forward, then
on the remote control, the car moves forward, then  , the car turns left,
, the car turns left,  ,the car moves back,
,the car moves back, , the car turns right,
, the car turns right, , the car stops.
, the car stops.
5.Code Explanation
command = read_ircode(ird) |
IR remote decodes, and the key values will be saved in command |
|---|---|
if command == “Up”: |
The car will go forward |
elif command == “Down”: |
The car will move back |
elif command == “Left”: |
The car will turn left |
elif command == “Right”: |
The car will turn right |
elif command == “Ok”: |
The car will stop |