Project 17:Line Tracking Sensor
Project 17.1:Detect Line Tracking Sensor
1. Beschreibung
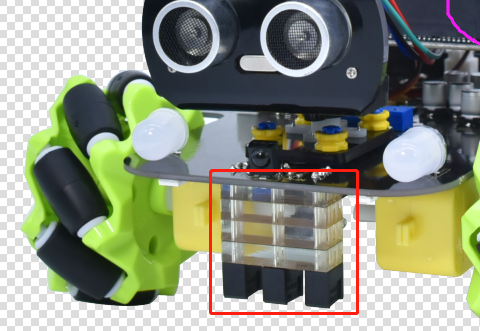
Die Motorsteuerplatine des Keyestudio 4WD Mecanum Robot Car ist mit einem 3-Kanal-Linienverfolgungssensor ausgestattet, der TCRT5000-IR-Module und 3 Potentiometer verwendet.
Das TCRT5000-IR-Modul enthält eine IR-Sende- und eine IR-Empfängerröhre. Wenn die von der Senderröhre ausgesendeten Infrarotsignale nach Reflexion von der Empfangsröhre empfangen werden, ändert sich der Widerstand der Empfangsröhre, was sich gewöhnlich in einer Spannungsänderung in der Schaltung widerspiegelt.
Der Widerstand variiert in Abhängigkeit von der Intensität der von der Empfangsröhre empfangenen Infrarotsignale, was oft von der Farbe der reflektierenden Oberfläche und dem Abstand zwischen der reflektierenden Oberfläche und der Empfangsröhre abhängt. Bei der Erkennung gilt Schwarz als aktiver hoher Pegel (High) und Weiß als niedriger Pegel (Low).
2. Funktionsprinzip
Fährt das Fahrzeug über eine weiße Strecke, sendet die unter dem Fahrzeug angebrachte IR-Senderröhre Infrarotsignale zur Streckenerkennung und die Empfangsröhre empfängt die Signale zurück. Dann gibt der Ausgang einen niedrigen Pegel (0) aus; wenn schwarze Linien erkannt werden, gibt er einen hohen Pegel (1) aus.
Nachdem Sie ein weißes Blatt Papier unter das 4WD Mecanum Robot Car gelegt haben, drehen Sie die Potentiometer am 3-Wege-Tracking-Sensor. Leuchtet die Kontroll-LED am Sensormodul, heben Sie das Fahrzeug an, sodass sich die beiden Räder des 4WD Mecanum Robot Car frei drehen können. Der Abstand des weißen Papiers beträgt etwa 1,5 cm. Erlischt die Kontroll-LED am Sensormodul, ist die Empfindlichkeit eingestellt.
3. Vorbereitung
Stecken Sie das micro:bit-Board in den Steckplatz des keyestudio 4WD Mecanum Robot Car V2.0
Legen Sie Batterien in den Batteriehalter ein
Schalten Sie den Netzschalter auf ON
Verbinden Sie das micro:bit über ein USB-Kabel mit Ihrem Computer
Öffnen Sie die Webversion von Makecode
4. Testcode

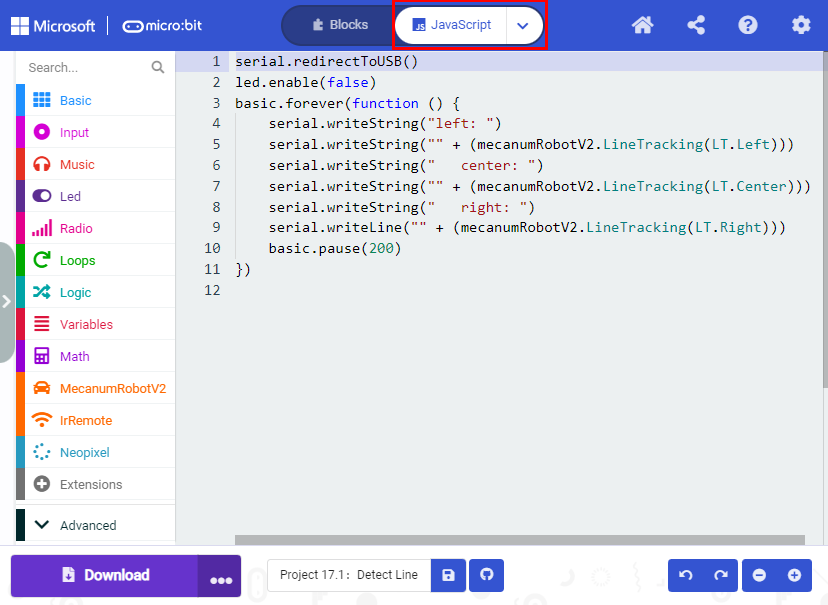
Klicken Sie auf “JavaScript”, um den entsprechenden JavaScript-Code anzusehen:
5. Testergebnis
Laden Sie den Code auf das micro:bit-Board und stellen Sie den POWER-Schalter auf ON.
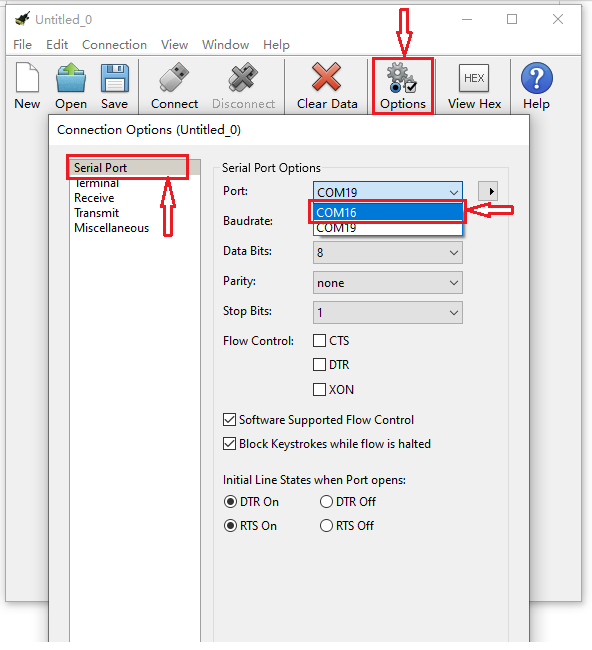
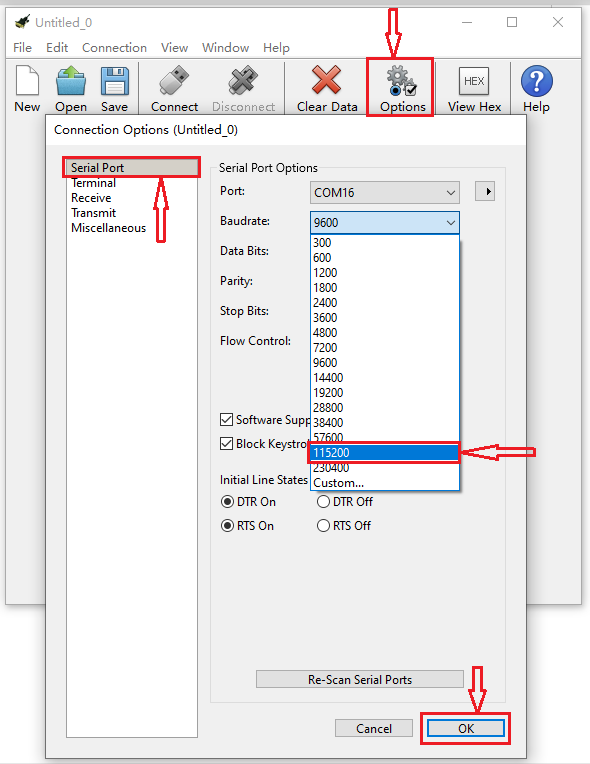
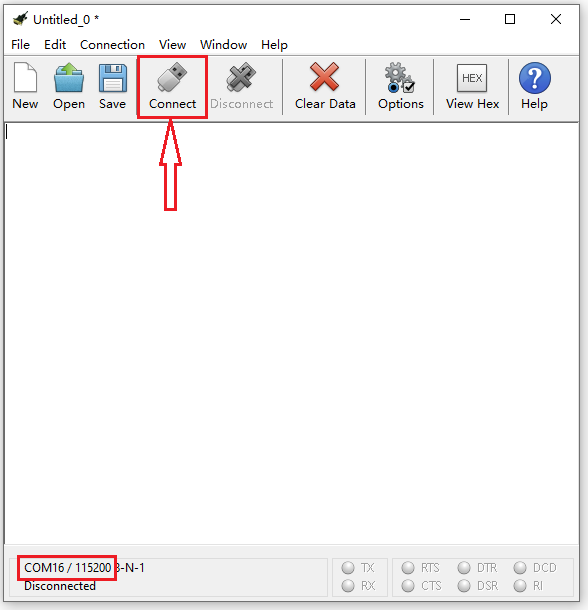
Öffnen Sie CoolTerm, klicken Sie auf Options und wählen Sie SerialPort. Stellen Sie COM-Port und Baudrate auf 115200 ein. Klicken Sie auf “OK” und “Connect”.
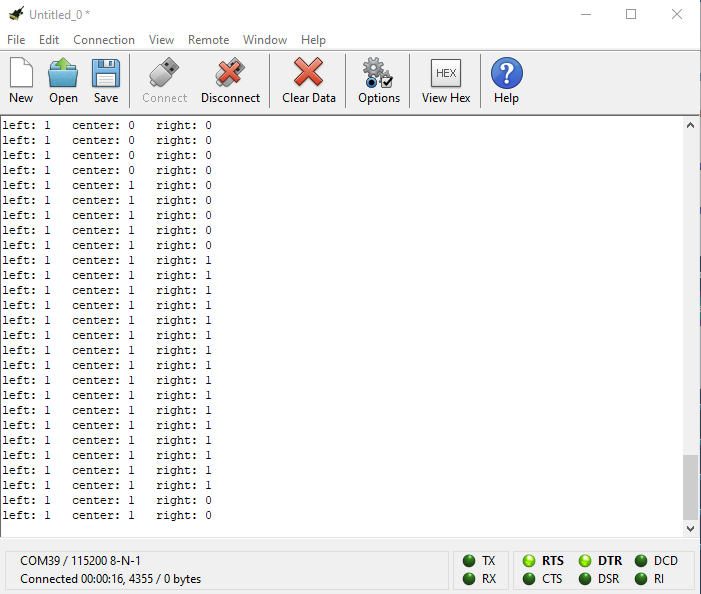
Der CoolTerm-Seriellmonitor zeigt die digitalen Signale an, die von den Linienverfolgungssensoren gelesen werden.
Project 17.2:Tracking Smart Car
1. Beschreibung
In dieser Lektion kombinieren wir einen Linienverfolgungssensor mit einem Motor, um ein Linienverfolgungs-Smartcar zu erstellen.
Das micro:bit-Board wertet die Signale aus und steuert das Smartcar, um die Linienverfolgungsfunktion zu demonstrieren.
2. Funktionsprinzip
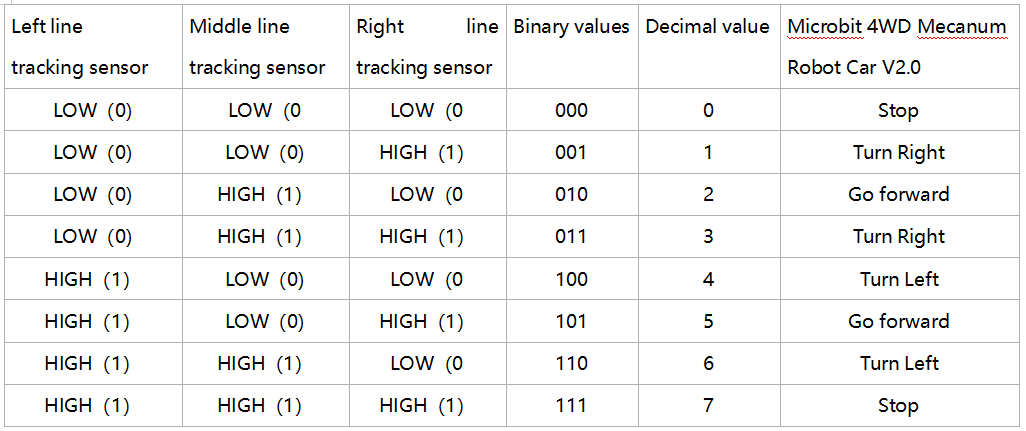
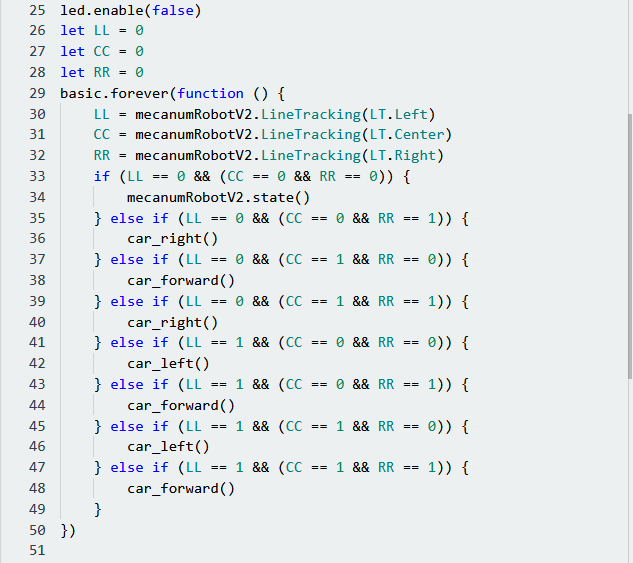
Das Smartcar führt je nach den von dem 3-Kanal-Linienverfolgungssensor empfangenen Werten unterschiedliche Bewegungen aus.
3. Vorbereitung
Stecken Sie das micro:bit-Board in den Steckplatz des keyestudio 4WD Mecanum Robot Car V2.0
Legen Sie Batterien in den Batteriehalter ein
Schalten Sie den Netzschalter auf ON
Verbinden Sie das micro:bit über ein USB-Kabel mit Ihrem Computer
Öffnen Sie die Webversion von Makecode
Warnung: Der 3-Wege-Tracking-Sensor sollte in Umgebungen ohne Infrarotstörungen wie direkte Sonneneinstrahlung verwendet werden. Sonnenlicht enthält viel unsichtbares Licht, z. B. Infrarot und Ultraviolett. In Umgebungen mit starker Sonneneinstrahlung kann der 3-Wege-Tracking-Sensor nicht ordnungsgemäß arbeiten.
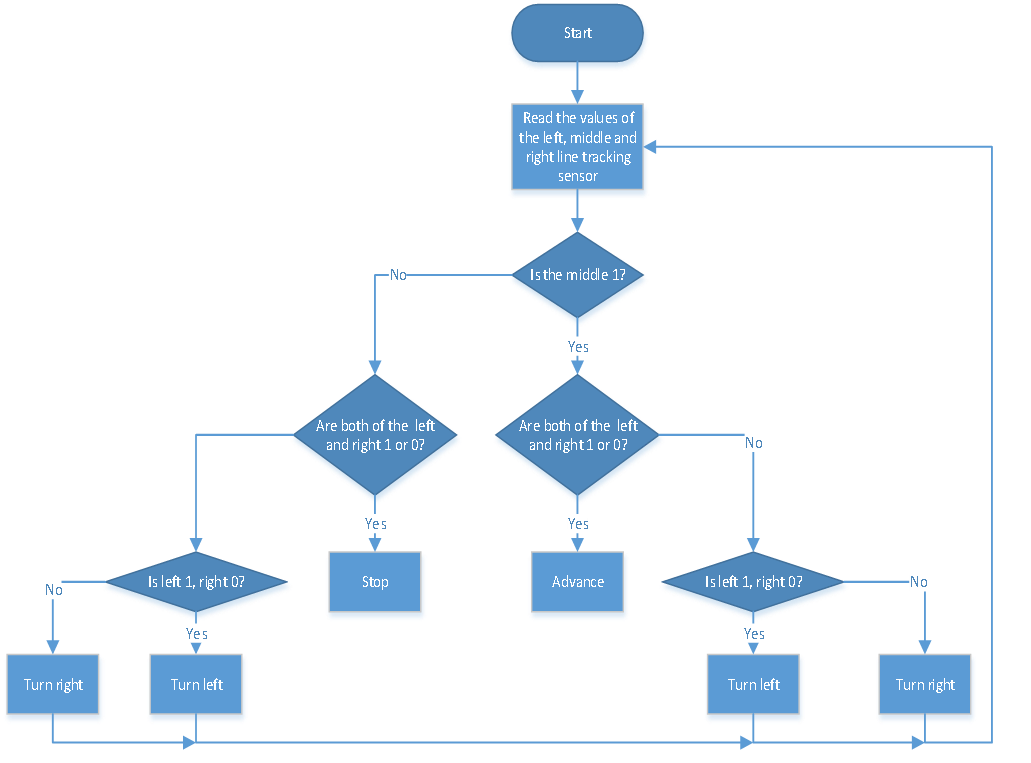
4.Flussdiagramm
5. Testcode
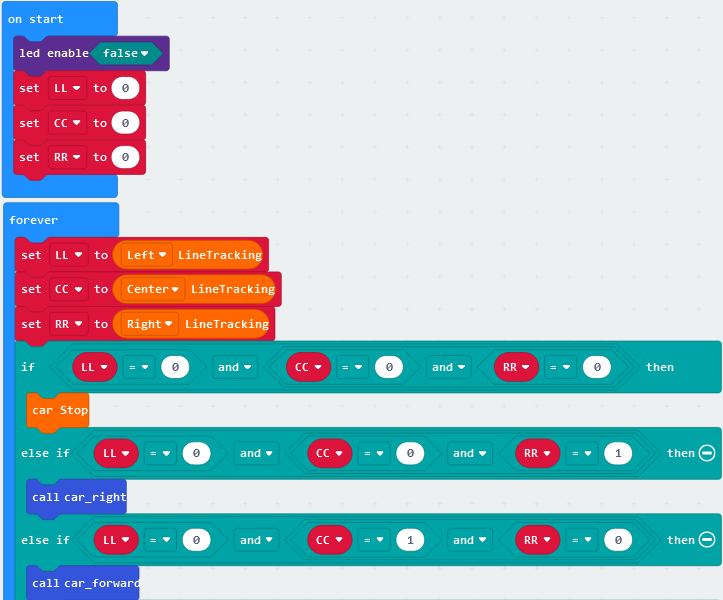
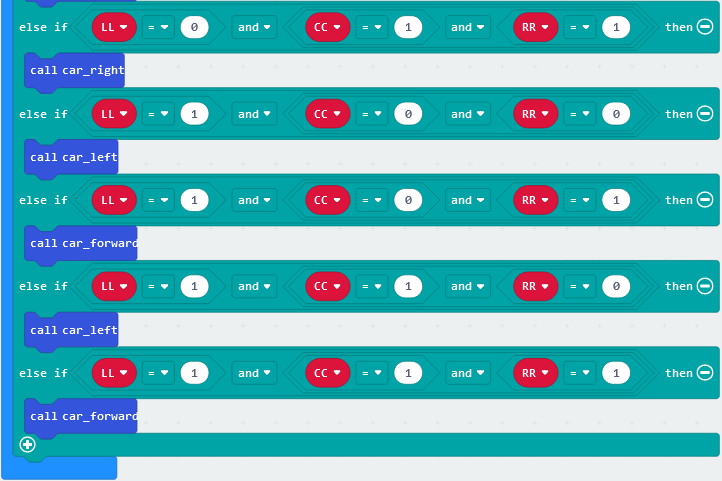
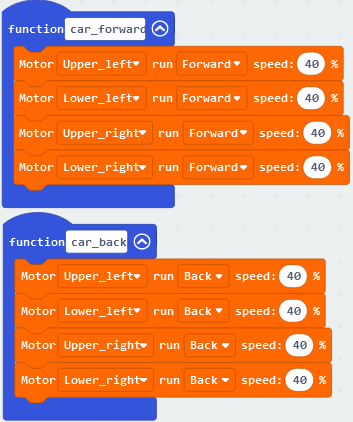
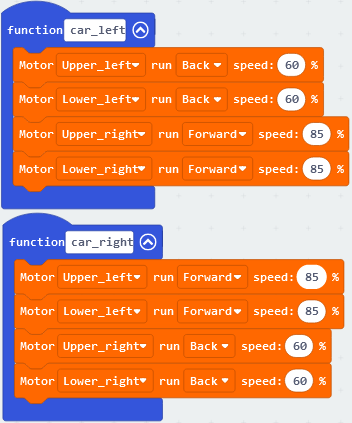
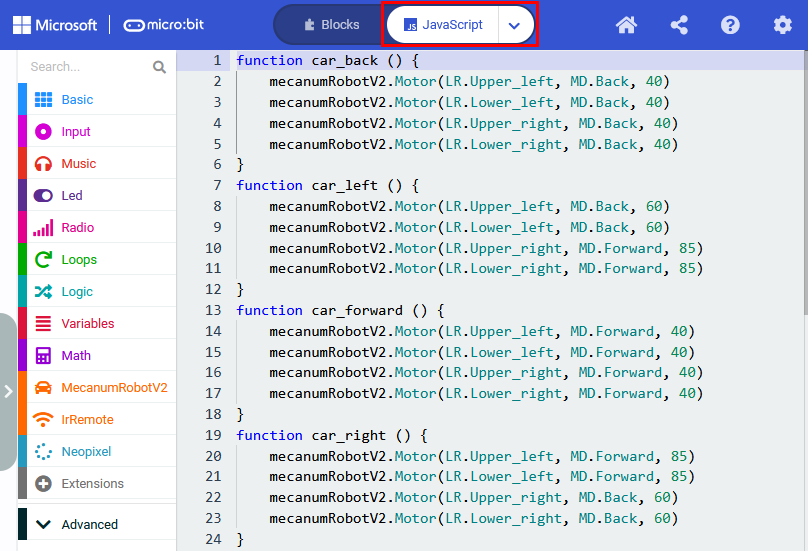
Klicken Sie auf “JavaScript”, um den entsprechenden JavaScript-Code anzuzeigen:
5. Testergebnis
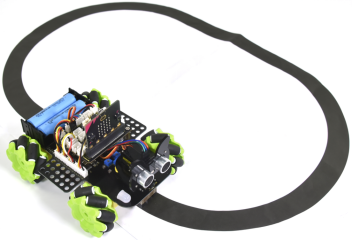
Laden Sie den Code auf das micro:bit und stellen Sie den POWER-Schalter auf ON; das Linienverfolgungsfahrzeug fährt entlang der schwarzen Linie vorwärts.
Hinweis: Schalten Sie den Schalter an der Rückseite des micro:bit-Fahrzeugs ein. Die Breite der schwarzen Linie sollte größer sein als die Breite des Linienverfolgungssensors.
Vermeiden Sie Tests des Smartcars bei starkem Licht.