Proyecto 16: Motor
1. Descripción
El coche robot Keyestudio 4WD Mecanum está equipado con 4 motores de CC con reducción, también llamados motores con caja de engranajes, que se desarrollaron a partir del motor de CC ordinario. Dispone de una caja reductora de engranajes a juego que proporciona una velocidad menor pero un par mayor. Además, distintas relaciones de reducción de la caja pueden ofrecer diferentes velocidades y pares.
El motor con engranajes es la integración de la caja de engranajes y el motor, y se aplica ampliamente en la industria siderúrgica y mecánica.
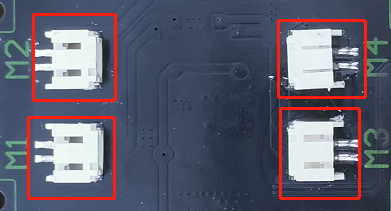
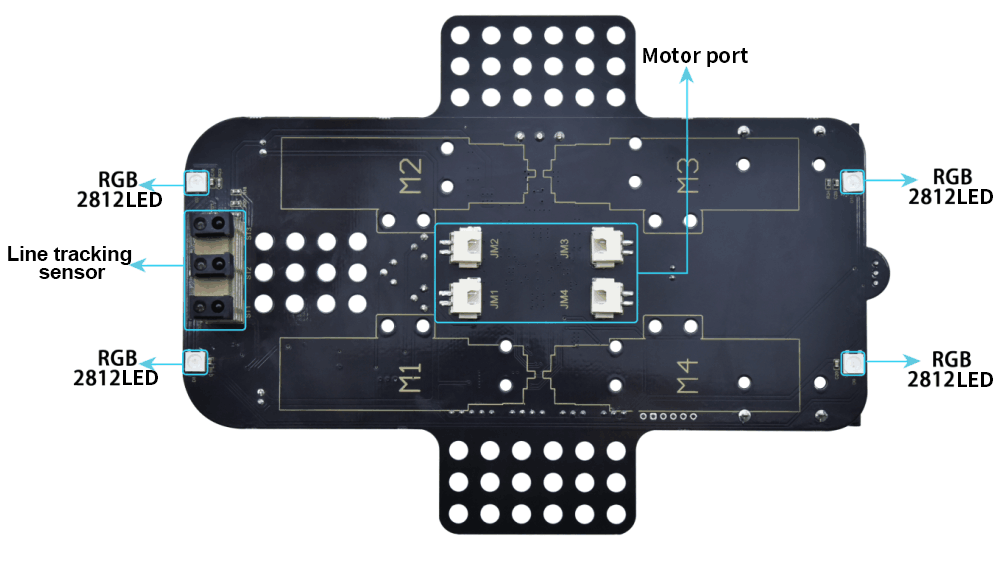
El shield controlador de motor para micro:bit viene con los chips STC8G y HR8833. Para ahorrar recursos de puertos I/O, controlamos la dirección de giro y la velocidad de los 4 motores de CC con el chip HR8833.
Detalles sobre los chips:
Frontal
Trasera
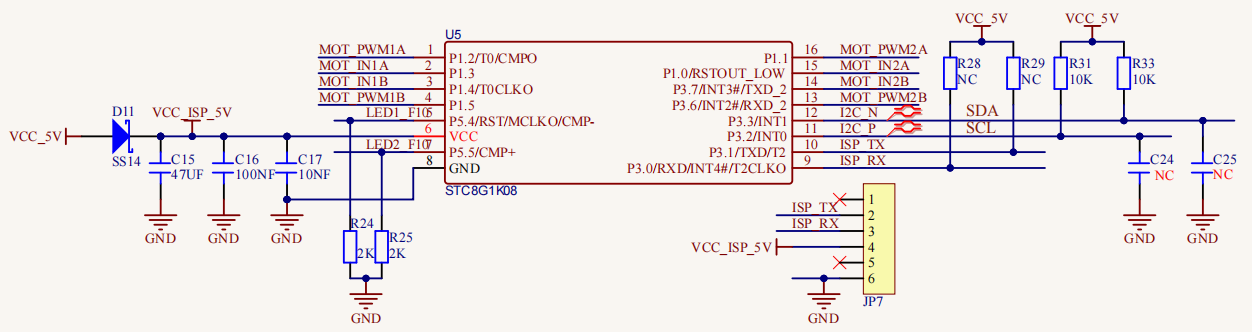
Circuito del chip STC8G1K08
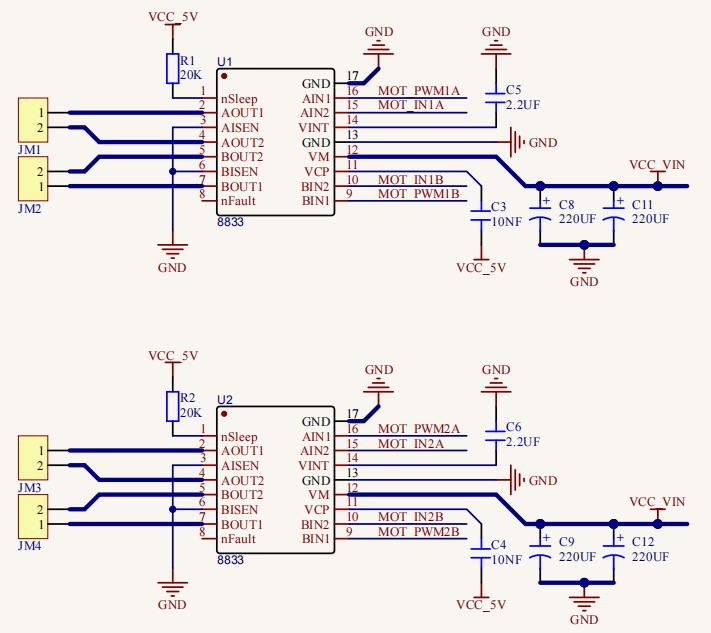
Circuito del controlador de motor HR8833
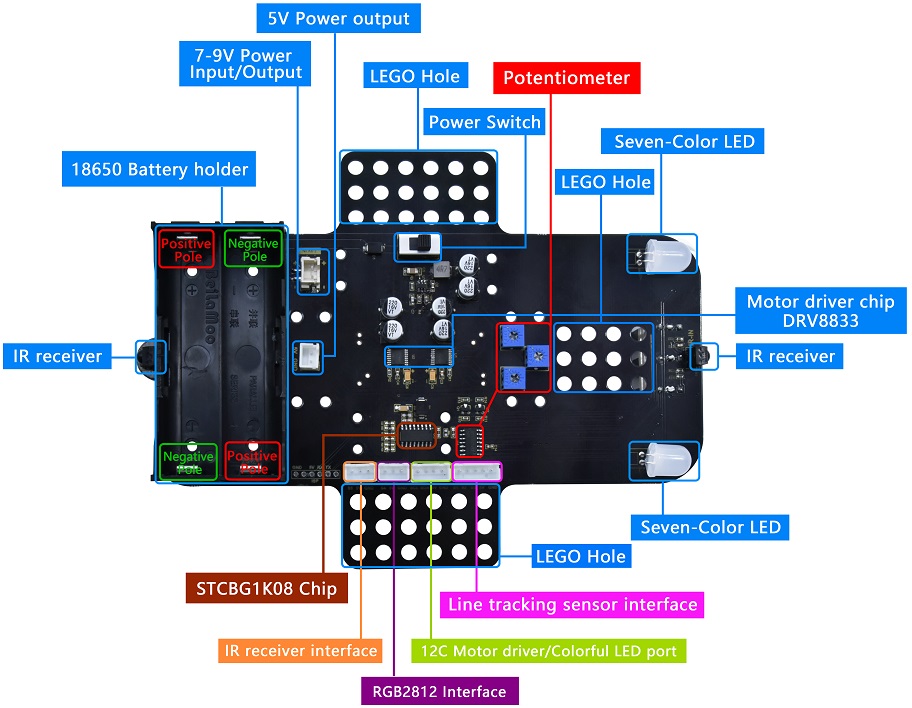
2. Preparación
Inserte la placa micro:bit en la ranura del Keyestudio 4WD Mecanum Robot Car V2.0
Inserte las baterías en el portapilas
Ajuste el interruptor de alimentación en la posición ON
Conecte la micro:bit al ordenador mediante un cable USB
Abra la versión offline de Mu.
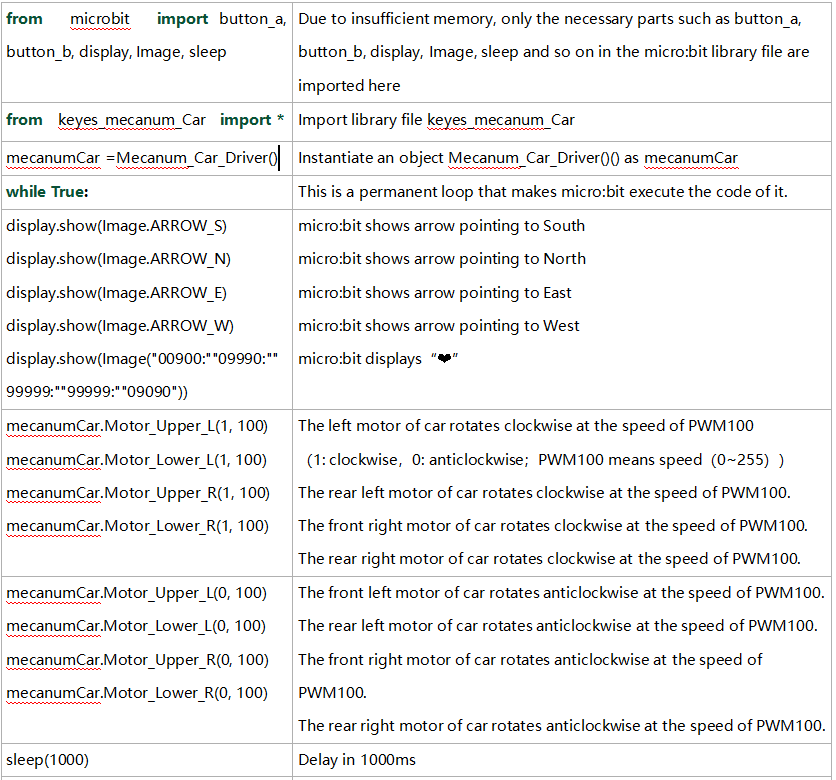
3. Código de prueba 1
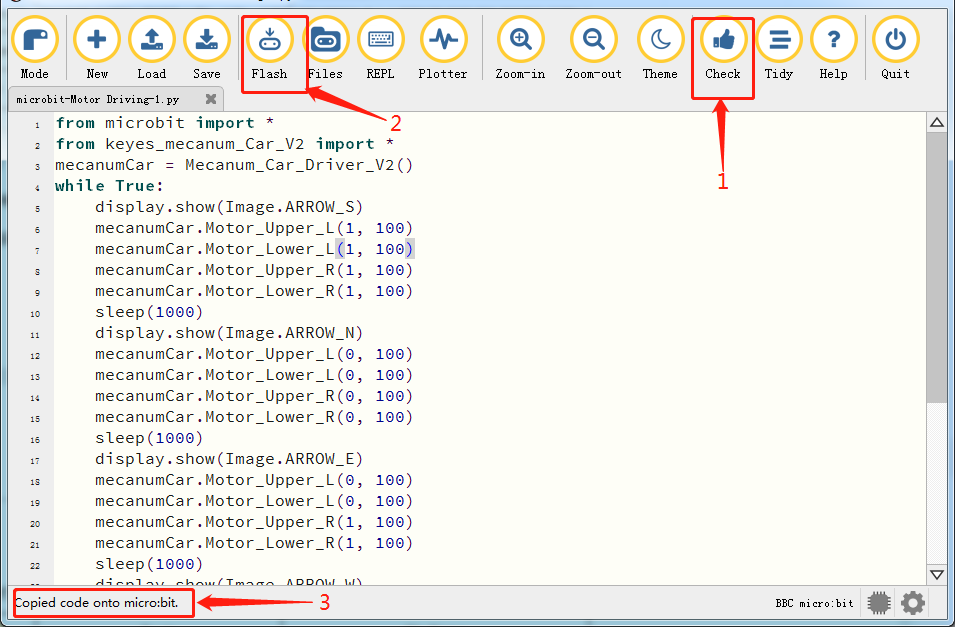
Abra el software Mu y abra el archivo “microbit-Motor Driving-1.py” para importar el código. También puede introducir el código usted mismo en la ventana de edición.
(Nota: Todas las palabras y símbolos en inglés deben permanecer en inglés.)
Haga clic en “Files” para importar el archivo de librería “keyes_mecanum_Car.py” a la micro:bit.
Haga clic en “Check” para comprobar errores en el código. El programa está incorrecto si aparecen subrayados y cursores.
Si el código es correcto, conecte la micro:bit al ordenador y haga clic en “Flash” para descargar el código a la placa micro:bit.
from microbit import *
from keyes_mecanum_Car_V2 import *
mecanumCar = Mecanum_Car_Driver_V2()
while True:
display.show(Image.ARROW_S)
mecanumCar.Motor_Upper_L(1, 100)
mecanumCar.Motor_Lower_L(1, 100)
mecanumCar.Motor_Upper_R(1, 100)
mecanumCar.Motor_Lower_R(1, 100)
sleep(1000)
display.show(Image.ARROW_N)
mecanumCar.Motor_Upper_L(0, 100)
mecanumCar.Motor_Lower_L(0, 100)
mecanumCar.Motor_Upper_R(0, 100)
mecanumCar.Motor_Lower_R(0, 100)
sleep(1000)
display.show(Image.ARROW_E)
mecanumCar.Motor_Upper_L(0, 100)
mecanumCar.Motor_Lower_L(0, 100)
mecanumCar.Motor_Upper_R(1, 100)
mecanumCar.Motor_Lower_R(1, 100)
sleep(1000)
display.show(Image.ARROW_W)
mecanumCar.Motor_Upper_L(1, 100)
mecanumCar.Motor_Lower_L(1, 100)
mecanumCar.Motor_Upper_R(0, 100)
mecanumCar.Motor_Lower_R(0, 100)
sleep(1000)
display.show(Image("00900:""09990:""99999:""99999:""09090"))
mecanumCar.Motor_Upper_L(0, 0)
mecanumCar.Motor_Lower_L(0, 0)
mecanumCar.Motor_Upper_R(0, 0)
mecanumCar.Motor_Lower_R(0, 0)
sleep(1000)
4. Resultado de la prueba 1
Después de descargar el código a la placa con éxito, alimente con la fuente externa (gire el interruptor DIP a ON) y pulse el botón de reset en la micro:bit.
A continuación, el coche avanzará durante 1 s, retrocederá durante 1 s, girará a la izquierda durante 1 s, a la derecha durante 1 s, girará en sentido antihorario durante 1 s, en sentido horario durante 1 s y se detendrá 1 s. La matriz LED también muestra los patrones.
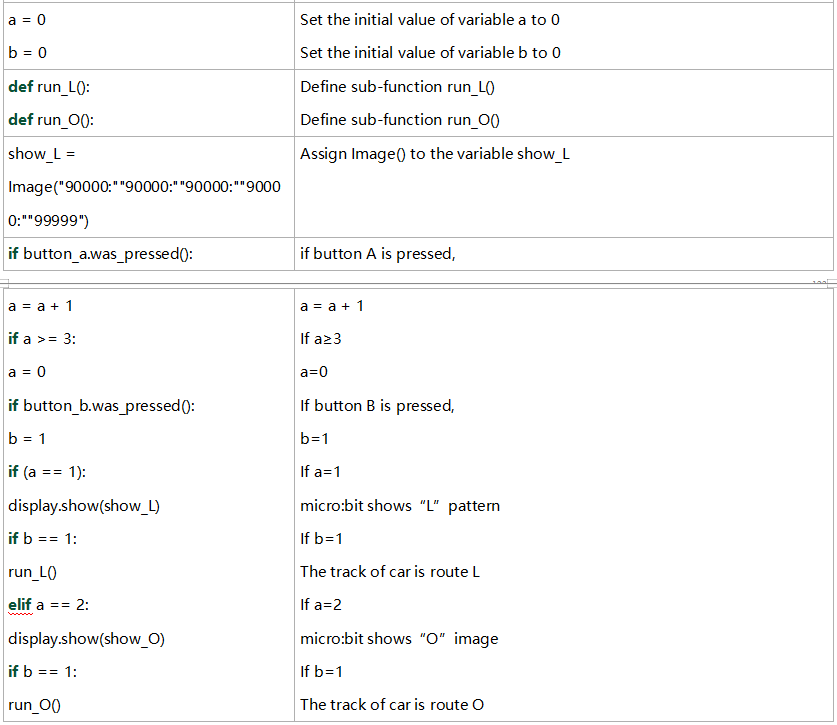
5. Código de prueba 2
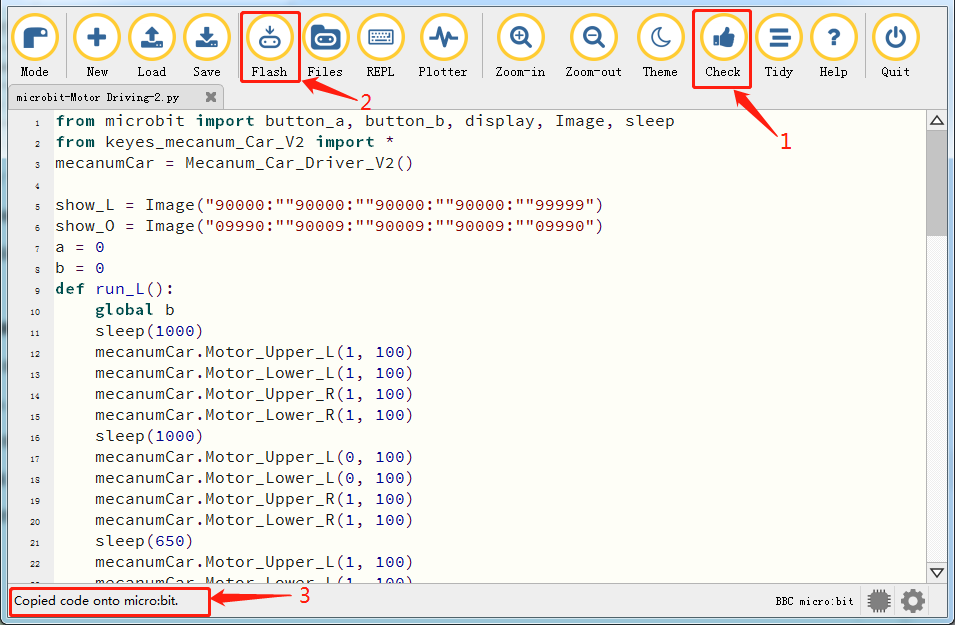
Abra el software Mu y abra el archivo “microbit-Motor Driving-2.py” para importar el código. También puede introducir el código usted mismo en la ventana de edición.
(Nota: Todas las palabras y símbolos en inglés deben permanecer en inglés.)
Haga clic en “Files” para importar el archivo de librería “keyes_mecanum_Car.py” a la micro:bit.
Haga clic en “Check” para comprobar errores en el código. El programa está incorrecto si aparecen subrayados y cursores.
Si el código es correcto, conecte la micro:bit al ordenador y haga clic en “Flash” para descargar el código a la placa micro:bit.
from microbit import button_a, button_b, display, Image, sleep
from keyes_mecanum_Car_V2 import *
mecanumCar = Mecanum_Car_Driver_V2()
show_L = Image("90000:""90000:""90000:""90000:""99999")
show_O = Image("09990:""90009:""90009:""90009:""09990")
a = 0
b = 0
def run_L():
global b
sleep(1000)
mecanumCar.Motor_Upper_L(1, 100)
mecanumCar.Motor_Lower_L(1, 100)
mecanumCar.Motor_Upper_R(1, 100)
mecanumCar.Motor_Lower_R(1, 100)
sleep(1000)
mecanumCar.Motor_Upper_L(0, 100)
mecanumCar.Motor_Lower_L(0, 100)
mecanumCar.Motor_Upper_R(1, 100)
mecanumCar.Motor_Lower_R(1, 100)
sleep(650)
mecanumCar.Motor_Upper_L(1, 100)
mecanumCar.Motor_Lower_L(1, 100)
mecanumCar.Motor_Upper_R(1, 100)
mecanumCar.Motor_Lower_R(1, 100)
sleep(1000)
mecanumCar.Motor_Upper_L(0, 0)
mecanumCar.Motor_Lower_L(0, 0)
mecanumCar.Motor_Upper_R(0, 0)
mecanumCar.Motor_Lower_R(0, 0)
b = 0
def run_O():
global b
sleep(1000)
mecanumCar.Motor_Upper_L(1, 100)
mecanumCar.Motor_Lower_L(1, 100)
mecanumCar.Motor_Upper_R(1, 100)
mecanumCar.Motor_Lower_R(1, 100)
sleep(1000)
mecanumCar.Motor_Upper_L(0, 100)
mecanumCar.Motor_Lower_L(0, 100)
mecanumCar.Motor_Upper_R(1, 100)
mecanumCar.Motor_Lower_R(1, 100)
sleep(620)
mecanumCar.Motor_Upper_L(1, 100)
mecanumCar.Motor_Lower_L(1, 100)
mecanumCar.Motor_Upper_R(1, 100)
mecanumCar.Motor_Lower_R(1, 100)
sleep(1000)
mecanumCar.Motor_Upper_L(0, 100)
mecanumCar.Motor_Lower_L(0, 100)
mecanumCar.Motor_Upper_R(1, 100)
mecanumCar.Motor_Lower_R(1, 100)
sleep(620)
mecanumCar.Motor_Upper_L(1, 100)
mecanumCar.Motor_Lower_L(1, 100)
mecanumCar.Motor_Upper_R(1, 100)
mecanumCar.Motor_Lower_R(1, 100)
sleep(1000)
mecanumCar.Motor_Upper_L(0, 100)
mecanumCar.Motor_Lower_L(0, 100)
mecanumCar.Motor_Upper_R(1, 100)
mecanumCar.Motor_Lower_R(1, 100)
sleep(620)
mecanumCar.Motor_Upper_L(1, 100)
mecanumCar.Motor_Lower_L(1, 100)
mecanumCar.Motor_Upper_R(1, 100)
mecanumCar.Motor_Lower_R(1, 100)
sleep(1000)
mecanumCar.Motor_Upper_L(0, 0)
mecanumCar.Motor_Lower_L(0, 0)
mecanumCar.Motor_Upper_R(0, 0)
mecanumCar.Motor_Lower_R(0, 0)
b = 0
while True:
if button_a.was_pressed():
a = a + 1
if a >= 3:
a = 0
if button_b.was_pressed():
b = 1
if (a == 1):
display.show(show_L)
if b == 1:
run_L()
elif a == 2:
display.show(show_O)
if b == 1:
run_O()
6. Resultado de la prueba 2
Después de descargar el código a la placa con éxito, alimente con la fuente externa (gire el interruptor DIP a ON) y pulse el botón de reset en la micro:bit.
Cuando se presionan por primera vez los botones A y B, la micro:bit mostrará “L”; la trayectoria del coche es en forma de “L”. Cuando se presionan de nuevo, la micro:bit muestra “口” y la trayectoria del coche es “口”. El coche repetirá este patrón.
7. Explicación del código