Proyecto 18:Sensor ultrasónico
Proyecto 18.1:Medición por ultrasonidos
1. Descripción
El sensor ultrasónico utiliza sonar para determinar la distancia a un objeto, como lo hacen los murciélagos. Ofrece una excelente detección de rango sin contacto con alta precisión y lecturas estables en un paquete fácil de usar. Incluye módulos transmisor y receptor ultrasónicos.
El sensor ultrasónico se utiliza en una amplia gama de proyectos electrónicos para crear aplicaciones de detección de obstáculos y medición de distancia, así como en diversas otras aplicaciones.
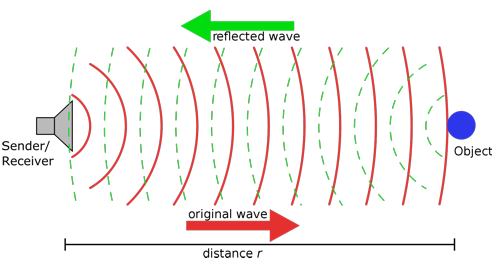
El módulo ultrasónico emitirá las ondas ultrasónicas tras la señal de trigger. Cuando las ondas ultrasónicas encuentran el objeto y se reflejan, el módulo emite una señal de eco, por lo que puede determinar la distancia al objeto a partir de la diferencia de tiempo entre la señal de trigger (TRIG) y la señal de eco (ECHO).
Como muestra la imagen, es como dos ojos. Uno es el extremo transmisor y el otro el extremo receptor.
Según el diagrama de conexión anterior, el puerto integrado del módulo del sensor ultrasónico está conectado al puerto 5V G P15 P16 en la placa base del controlador de motor micro:bit. El pin Trig (T) está controlado por P15 del micro:bit y el pin Echo (E) por P16.

2. Principio de funcionamiento
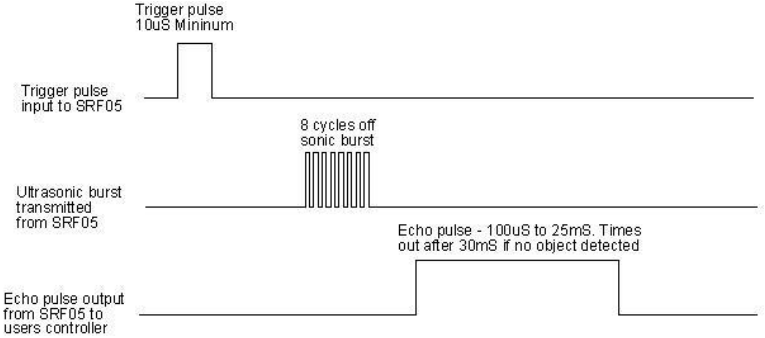
(1) Llevar TRIG a nivel bajo y luego generar una señal de nivel alto con al menos 10 µs;
(2) Tras el disparo, el módulo enviará automáticamente ocho pulsos ultrasónicos de 40 kHz y detectará si hay retorno de señal;
(3) Si hay retorno de señal, cuando ECHO (E) salga a nivel alto, la duración del nivel alto es el tiempo desde la transmisión hasta la recepción de las ondas ultrasónicas. Entonces la distancia de prueba = duración del nivel alto *340 m/s*0.5.
3. Parámetros
Voltaje de trabajo: 3-5.5V (DC)
Corriente de trabajo: 15mA
Frecuencia de trabajo: 40kHz
Distancia máxima de detección: aproximadamente 3 m
Distancia mínima de detección: 2-3 cm
Precisión: hasta 0.2 cm
Ángulo de detección: menos de 15 grados
Pulso de trigger de entrada: 10us, nivel TTL
Señal de eco de salida: señal de nivel TTL (alto), proporcional a la distancia
4. Preparación
Inserte la placa micro:bit en la ranura del keyestudio 4WD Mecanum Robot Car V2.0
Coloque las baterías en el portabaterías
Coloque el interruptor de alimentación en ON
Conecte el micro:bit al ordenador mediante un cable USB
Abra la versión offline de Mu.
5. Código de prueba
Abra el software Mu y cargue el archivo “Ultrasonic Ranging.py” para importar el código. También puede introducir el código en la ventana de edición usted mismo.
(Nota: Todas las palabras y símbolos en inglés deben permanecer en inglés.)
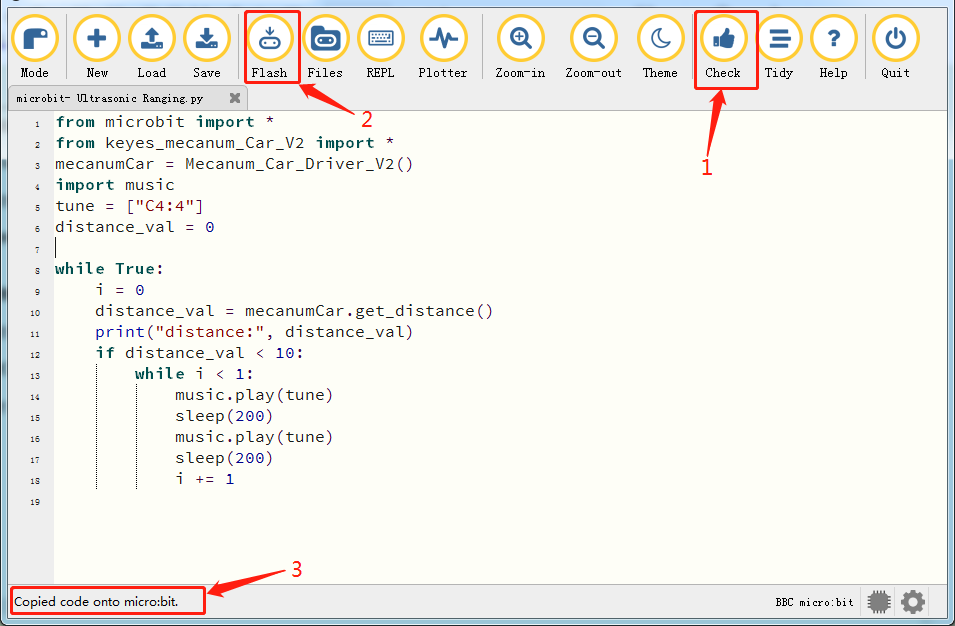
Haga clic en “Files” para importar el archivo de biblioteca “keyes_mecanum_Car_V2.py” al micro:bit.
Haga clic en “Check” para examinar errores en el código. El programa es incorrecto si se muestran subrayados y cursores.
Si el código es correcto, conecte el micro:bit a su ordenador y haga clic en “Flash” para descargar el código a la placa micro:bit.
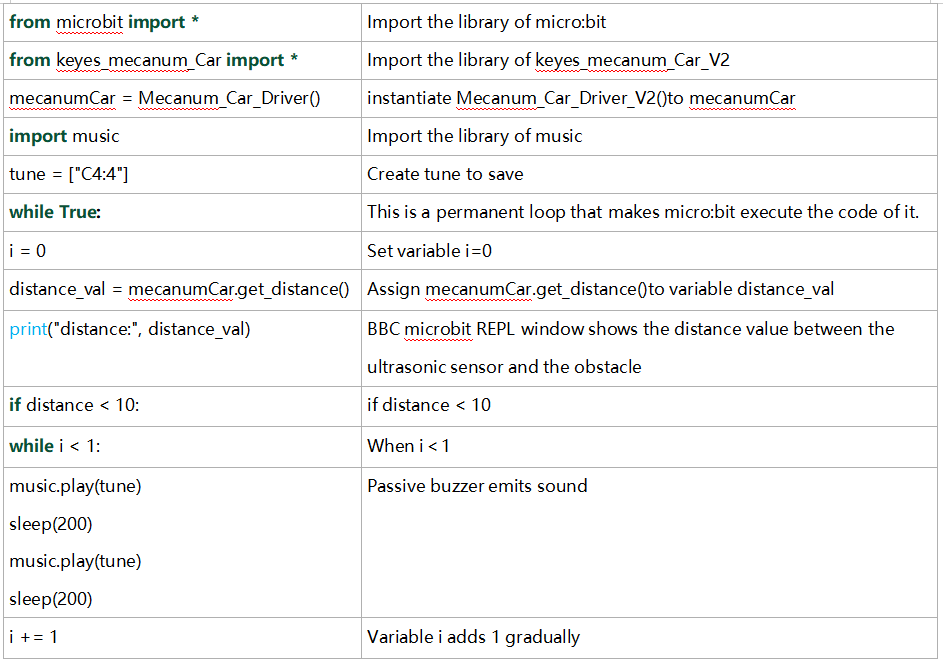
from microbit import *
from keyes_mecanum_Car_V2 import *
mecanumCar = Mecanum_Car_Driver_V2()
import music
tune = ["C4:4"]
distance_val = 0
while True:
i = 0
distance_val = mecanumCar.get_distance()
print("distance:", distance_val)
if distance_val < 10:
while i < 1:
music.play(tune)
sleep(200)
music.play(tune)
sleep(200)
i += 1
6. Resultado de la prueba
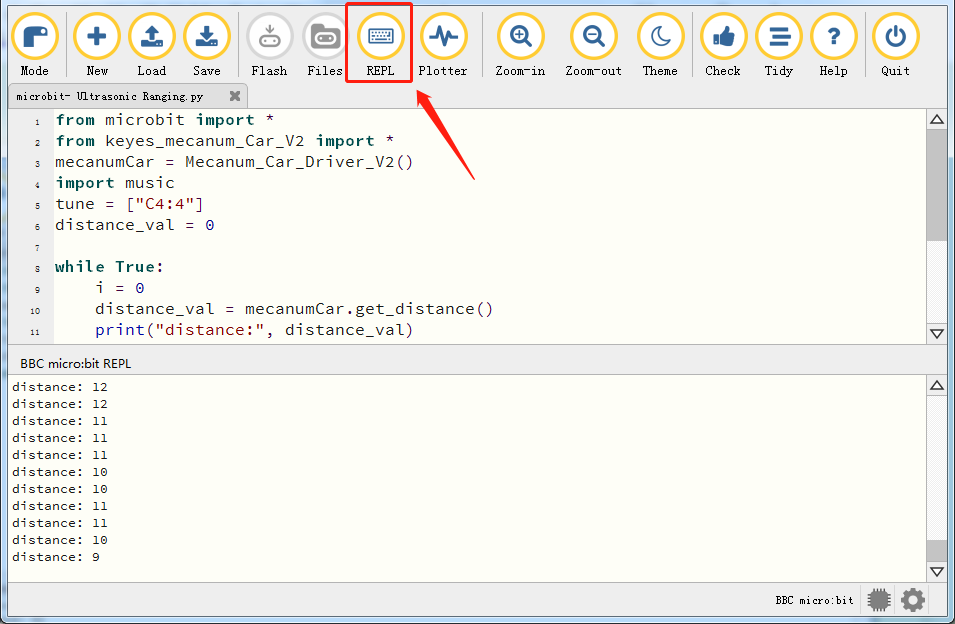
Después de descargar el código a la placa con éxito y sin desconectar el cable USB, haga clic en “REPL” y luego presione el botón de reset.
Se mostrará el valor de distancia del obstáculo, como se muestra a continuación.
Cuando la distancia sea menor de 10 cm, el zumbador pasivo del coche emitirá sonido.
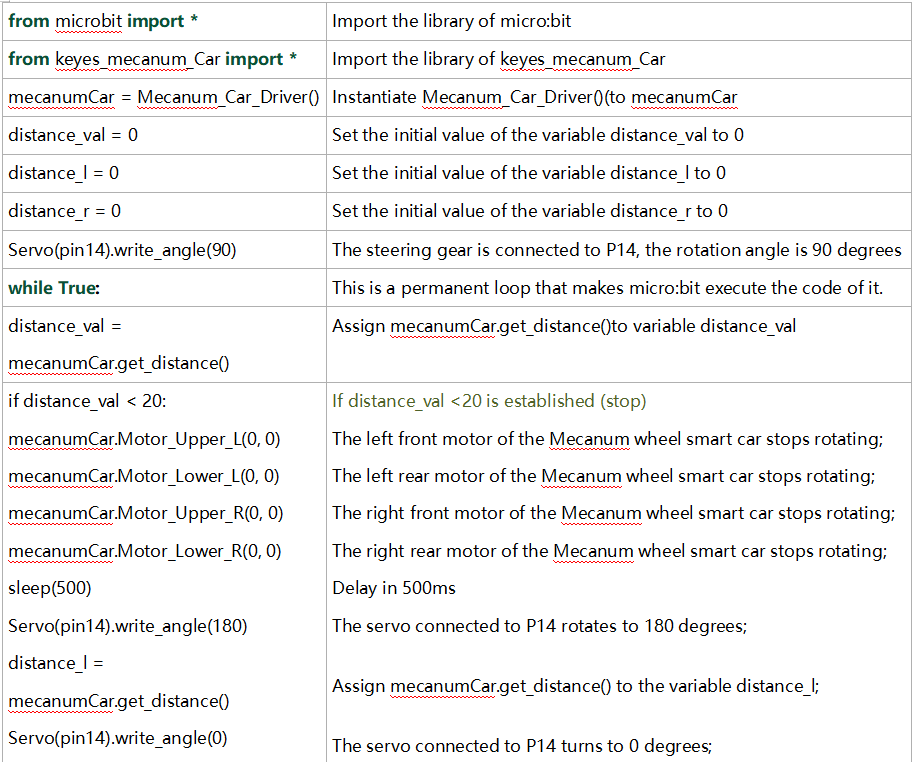
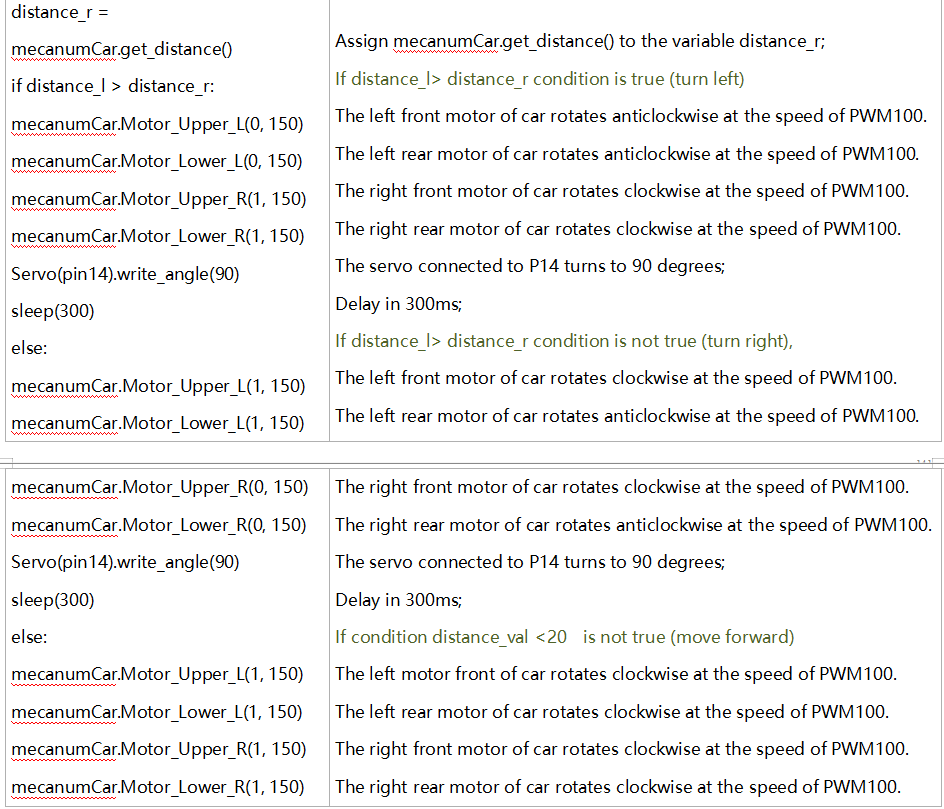
7. Explicación del código
Proyecto 18.2:Evitación por ultrasonidos
1. Descripción
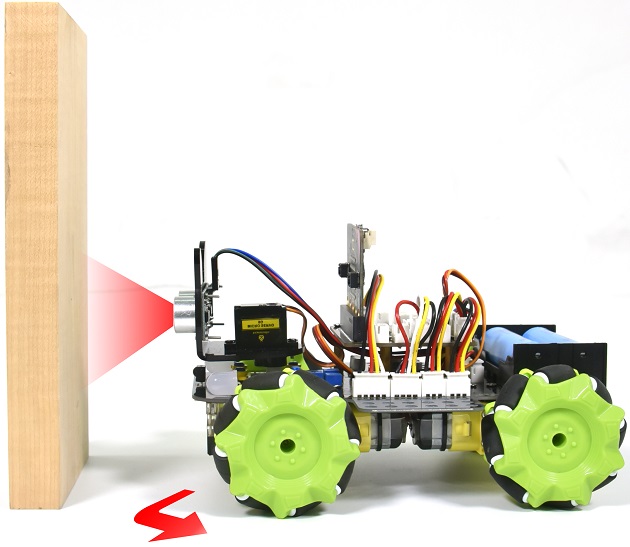
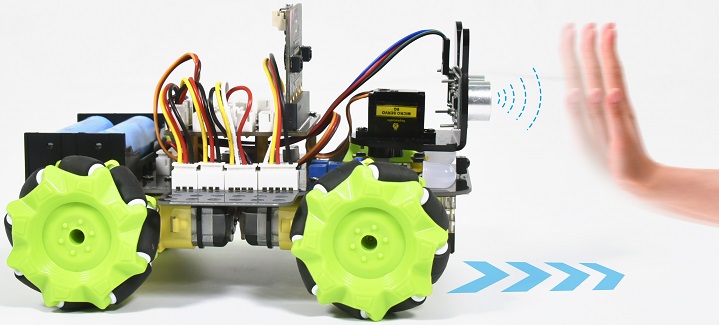
En este proyecto integraremos un sensor ultrasónico y un coche para crear un coche de evitación por ultrasonidos.
Su principio es detectar la distancia entre el coche y el obstáculo mediante el sensor ultrasónico para controlar el movimiento del coche inteligente.
2. Preparación
Inserte la placa micro:bit en la ranura del keyestudio 4WD Mecanum Robot Car V2.0
Coloque las baterías en el portabaterías
Coloque el interruptor de alimentación en ON
Conecte el micro:bit al ordenador mediante un cable USB
Abra la versión offline de Mu.
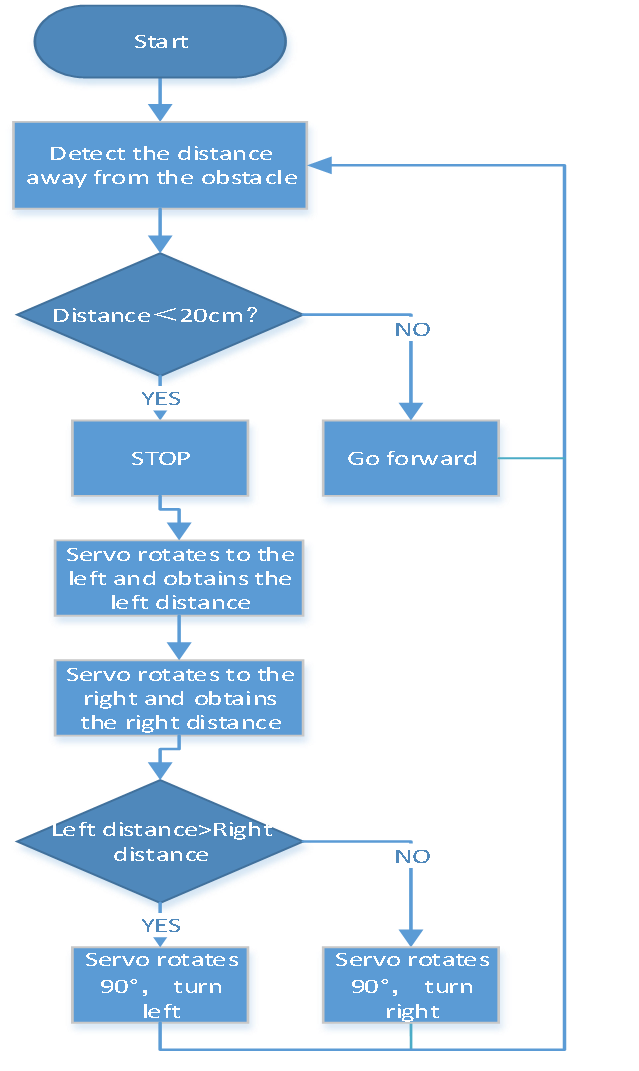
3. Diagrama de flujo
4. Código de prueba
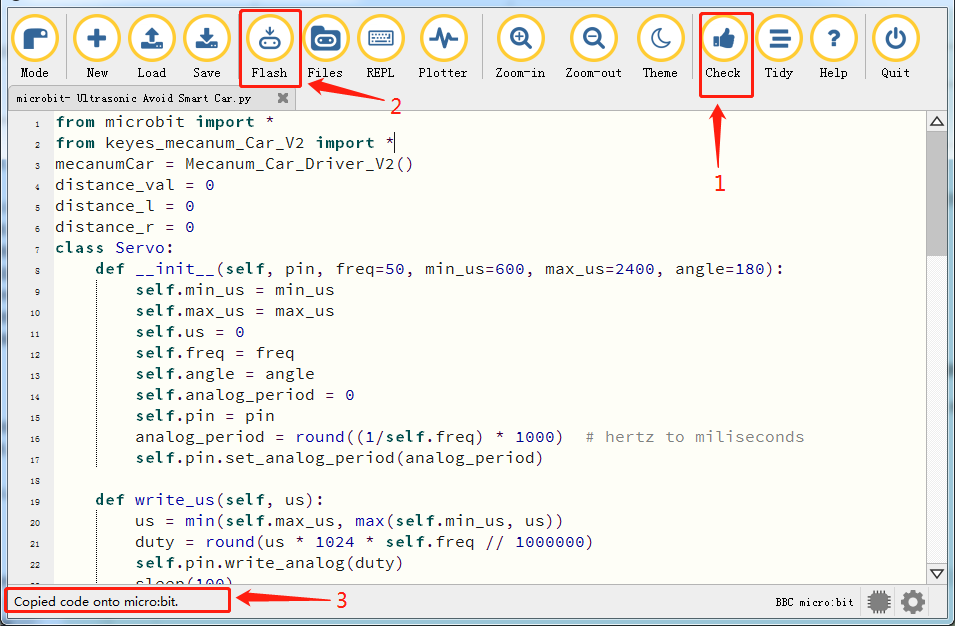
Abra el software Mu y cargue el archivo “Ultrasonic Avoid Smart Car.py” para importar el código. También puede introducir el código en la ventana de edición usted mismo.
(Nota: Todas las palabras y símbolos en inglés deben permanecer en inglés.)
Haga clic en “Files” para importar el archivo de biblioteca “keyes_mecanum_Car_V2.py” al micro:bit.
Haga clic en “Check” para examinar errores en el código. El programa es incorrecto si se muestran subrayados y cursores.
Si el código es correcto, conecte el micro:bit a su ordenador y haga clic en “Flash” para descargar el código a la placa micro:bit.
from microbit import *
from keyes_mecanum_Car_V2 import *
mecanumCar = Mecanum_Car_Driver_V2()
distance_val = 0
distance_l = 0
distance_r = 0
class Servo:
def __init__(self, pin, freq=50, min_us=600, max_us=2400, angle=180):
self.min_us = min_us
self.max_us = max_us
self.us = 0
self.freq = freq
self.angle = angle
self.analog_period = 0
self.pin = pin
analog_period = round((1/self.freq) * 1000) # hertz to miliseconds
self.pin.set_analog_period(analog_period)
def write_us(self, us):
us = min(self.max_us, max(self.min_us, us))
duty = round(us * 1024 * self.freq // 1000000)
self.pin.write_analog(duty)
sleep(100)
self.pin.write_analog(0)
def write_angle(self, degrees=None):
if degrees is None:
degrees = math.degrees(radians)
degrees = degrees % 360
total_range = self.max_us - self.min_us
us = self.min_us + total_range * degrees // self.angle
self.write_us(us)
Servo(pin14).write_angle(90)
while True:
distance_val = mecanumCar.get_distance()
if distance_val < 20:
mecanumCar.Motor_Upper_L(0, 0)
mecanumCar.Motor_Lower_L(0, 0)
mecanumCar.Motor_Upper_R(0, 0)
mecanumCar.Motor_Lower_R(0, 0)
sleep(500)
Servo(pin14).write_angle(180)
sleep(500)
distance_l = mecanumCar.get_distance()
sleep(500)
Servo(pin14).write_angle(0)
sleep(500)
distance_r = mecanumCar.get_distance()
sleep(500)
if distance_l > distance_r:
mecanumCar.Motor_Upper_L(0, 100)
mecanumCar.Motor_Lower_L(0, 100)
mecanumCar.Motor_Upper_R(1, 100)
mecanumCar.Motor_Lower_R(1, 100)
Servo(pin14).write_angle(90)
sleep(300)
else:
mecanumCar.Motor_Upper_L(1, 100)
mecanumCar.Motor_Lower_L(1, 100)
mecanumCar.Motor_Upper_R(0, 100)
mecanumCar.Motor_Lower_R(0, 100)
Servo(pin14).write_angle(90)
sleep(300)
else:
mecanumCar.Motor_Upper_L(1, 100)
mecanumCar.Motor_Lower_L(1, 100)
mecanumCar.Motor_Upper_R(1, 100)
mecanumCar.Motor_Lower_R(1, 100)
5. Resultado de la prueba
Después de descargar el código a la placa con éxito, alimentación externa (poner el interruptor DIP en ON), y presione el botón de reset en el micro:bit.
Cuando la distancia al obstáculo es mayor de 20 cm, el coche avanza; por el contrario, el coche inteligente gira a la izquierda.
6. Explicación del código
Proyecto 18.3:Seguimiento por ultrasonidos
1. Descripción
En la lección anterior aprendimos el principio básico del sensor de seguimiento de línea. A continuación, combinaremos el sensor ultrasónico con el coche para crear un coche seguidor por ultrasonidos.
El sensor ultrasónico detecta la distancia al obstáculo y controla el estado de movimiento del coche.
2. Preparación
Inserte la placa micro:bit en la ranura del keyestudio 4WD Mecanum Robot Car V2.0
Coloque las baterías en el portabaterías
Coloque el interruptor de alimentación en ON
Conecte el micro:bit al ordenador mediante un cable USB
Abra la versión offline de Mu.
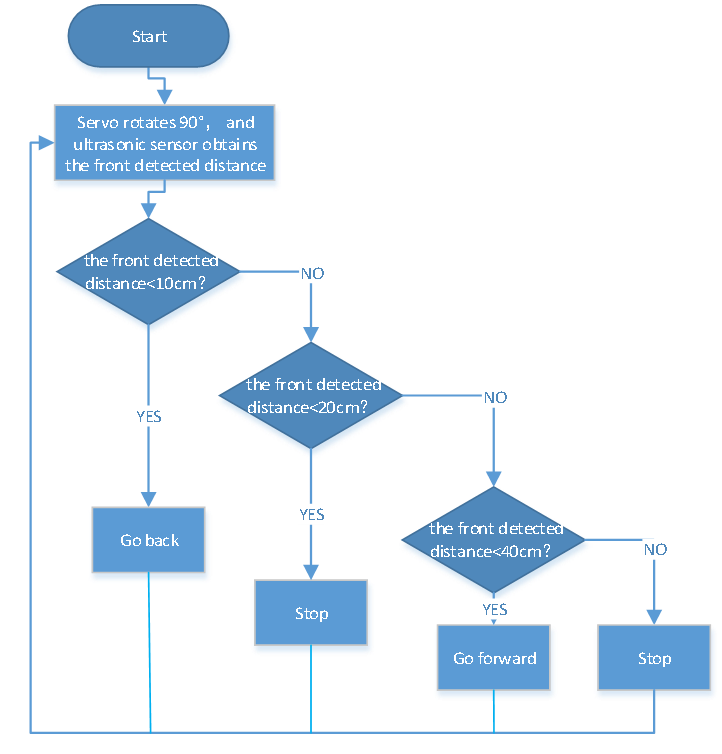
2. Diagrama de flujo
3. Código de prueba
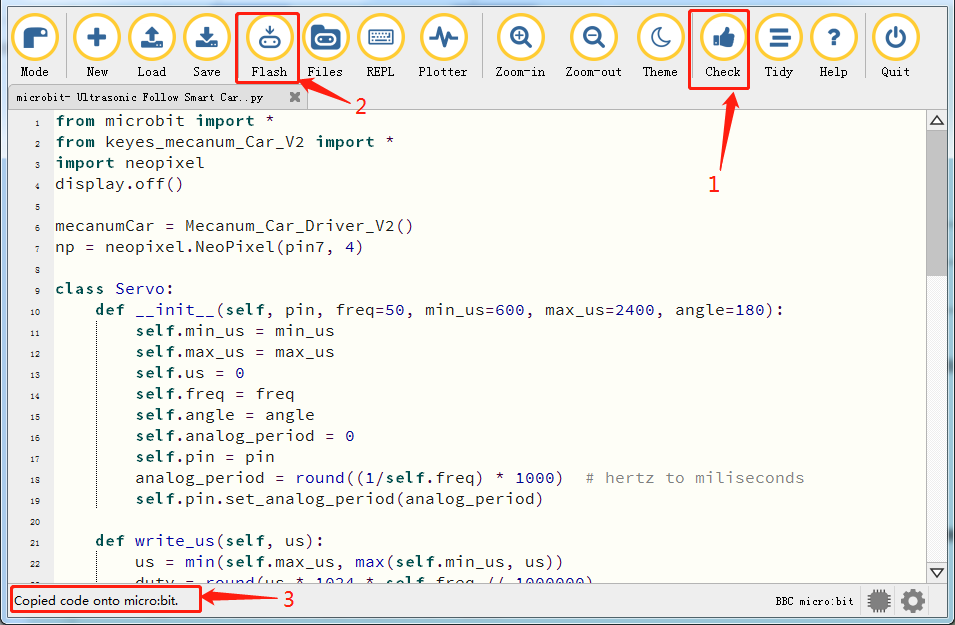
Abra el software Mu y cargue el archivo “Ultrasonic Follow Smart Car.py” para importar el código. También puede introducir el código en la ventana de edición usted mismo.
(Nota: Todas las palabras y símbolos en inglés deben permanecer en inglés.)
Haga clic en “Files” para importar el archivo de biblioteca “keyes_mecanum_Car_V2.py” al micro:bit.
Haga clic en “Check” para examinar errores en el código. El programa es incorrecto si se muestran subrayados y cursores.
Si el código es correcto, conecte el micro:bit a su ordenador y haga clic en “Flash” para descargar el código a la placa micro:bit.
from microbit import *
from keyes_mecanum_Car_V2 import *
import neopixel
display.off()
mecanumCar = Mecanum_Car_Driver_V2()
np = neopixel.NeoPixel(pin7, 4)
class Servo:
def __init__(self, pin, freq=50, min_us=600, max_us=2400, angle=180):
self.min_us = min_us
self.max_us = max_us
self.us = 0
self.freq = freq
self.angle = angle
self.analog_period = 0
self.pin = pin
analog_period = round((1/self.freq) * 1000) # hertz to miliseconds
self.pin.set_analog_period(analog_period)
def write_us(self, us):
us = min(self.max_us, max(self.min_us, us))
duty = round(us * 1024 * self.freq // 1000000)
self.pin.write_analog(duty)
sleep(100)
self.pin.write_analog(0)
def write_angle(self, degrees=None):
if degrees is None:
degrees = math.degrees(radians)
degrees = degrees % 360
total_range = self.max_us - self.min_us
us = self.min_us + total_range * degrees // self.angle
self.write_us(us)
Servo(pin14).write_angle(90)
while True:
distance_val = 0
distance_val = mecanumCar.get_distance()
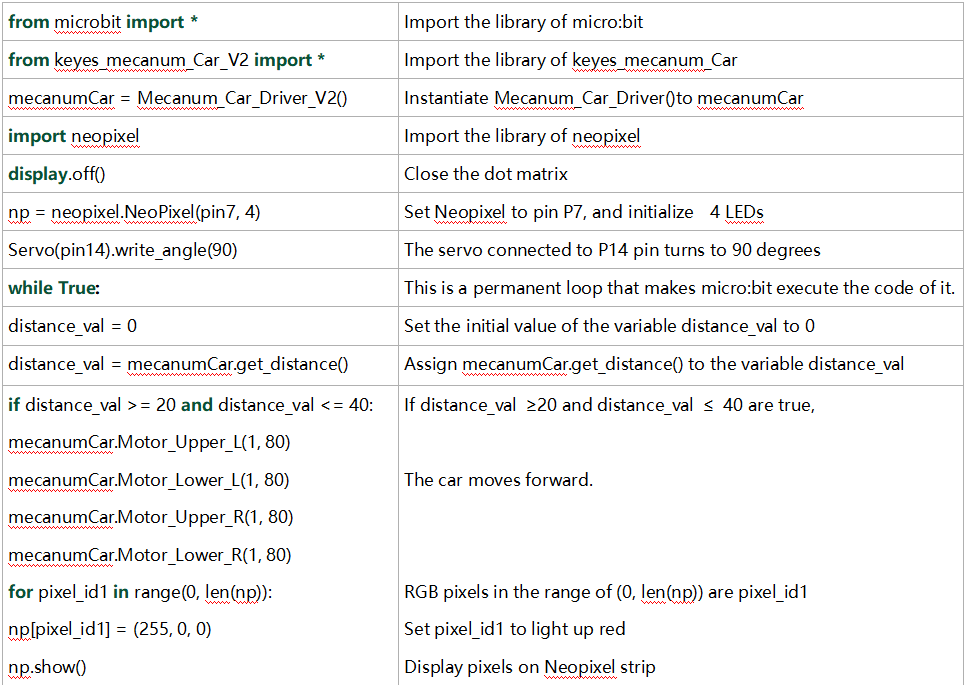
if distance_val >= 20 and distance_val <= 40:
mecanumCar.Motor_Upper_L(1, 80)
mecanumCar.Motor_Lower_L(1, 80)
mecanumCar.Motor_Upper_R(1, 80)
mecanumCar.Motor_Lower_R(1, 80)
for pixel_id1 in range(0, len(np)):
np[pixel_id1] = (255, 0, 0)
np.show()
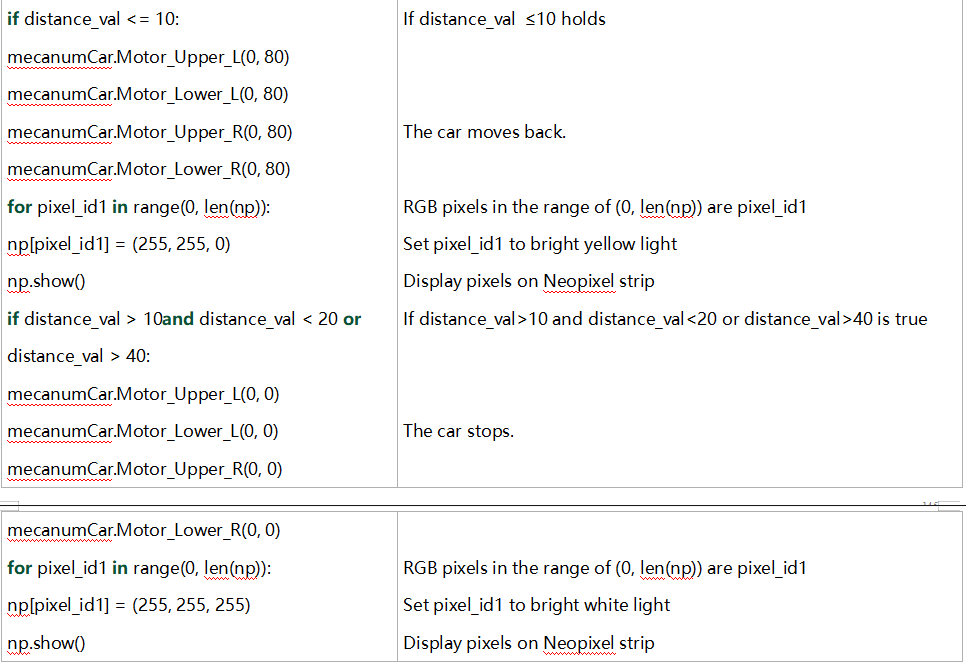
if distance_val <= 10:
mecanumCar.Motor_Upper_L(0, 80)
mecanumCar.Motor_Lower_L(0, 80)
mecanumCar.Motor_Upper_R(0, 80)
mecanumCar.Motor_Lower_R(0, 80)
for pixel_id1 in range(0, len(np)):
np[pixel_id1] = (255, 255, 0)
np.show()
if distance_val > 10 and distance_val < 20 or distance_val > 40:
mecanumCar.Motor_Upper_L(0, 0)
mecanumCar.Motor_Lower_L(0, 0)
mecanumCar.Motor_Upper_R(0, 0)
mecanumCar.Motor_Lower_R(0, 0)
for pixel_id1 in range(0, len(np)):
np[pixel_id1] = (255, 255, 255)
np.show()
4. Resultado de la prueba
Después de descargar el código a la placa con éxito, alimentación externa (poner el interruptor DIP en ON), y presione el botón de reset en el micro:bit.
El coche inteligente podrá seguir el obstáculo en movimiento y las 4 luces RGB WS2812 mostrarán diferentes colores.
Nota: el obstáculo sólo puede moverse frente al coche inteligente.
5. Explicación del código