5.4.23 Projekt 13.2 IoT Smart Home
1. Beschreibung
Das IOT smart home verbindet sich über WiFi mit dem heimischen WiFi, und das für die Bedienung verwendete Mobiltelefon sollte ebenfalls mit demselben WiFi verbunden sein.
Außerdem kann das Smart Home auch eine Verbindung zum Hotspot des Mobiltelefons herstellen. Wenn die Verbindung erfolgreich ist, zeigt das LCD1602 die IP-Adresse an. Über die Telefon-App kann durch Eingabe der entsprechenden IP die Kommunikation hergestellt werden, sodass die App-Steuerung der verschiedenen Funktionen des Smart Home möglich wird.
2. Test Code
⚠️ \ ACHTUNG:\ Nachdem Sie die Code-Datei geöffnet haben, müssen Sie den WiFi-Namen und das Passwort ändern, mit denen das ESP32 Development Board verbinden soll. Ersetzen Sie ChinaNet-2.4G-0DF0 und ChinaNet@233 jeweils durch Ihren eigenen WiFi-Namen und Ihr eigenes Passwort. Sie müssen dies tun, bevor Sie den Code hochladen; andernfalls kann das ESP32-Board keine Netzwerkverbindung herstellen.
const char* ssid = "ChinaNet-2.4G-0DF0"; // Enter your own WiFi name
const char* pwd = "ChinaNet@233"; // Enter your own WiFi passwords
⚠️ HINWEIS: Bitte stellen Sie sicher, dass der WiFi-Name und das Passwort im Code mit dem Netzwerk übereinstimmen, mit dem Ihr Computer, Mobiltelefon/Tablet, das ESP32 Development Board und Ihr Router verbunden sind. Sie müssen sich im selben lokalen Netzwerk (WiFi) befinden.
⚠️ HINWEIS: Das WiFi muss auf einer 2.4Ghz-Frequenz betrieben werden; andernfalls kann das ESP32 keine Verbindung zum WiFi herstellen.
#include <Arduino.h>
#ifdef ESP32
#include <WiFi.h>
#elif defined(ESP8266)
#include <ESP8266WiFi.h>
#endif
#include <Wire.h>
#include <Adafruit_NeoPixel.h>
#define LED_PIN 26
#define LED_COUNT 4 // Number of NeoPixels attached
Adafruit_NeoPixel strip(LED_COUNT, LED_PIN, NEO_GRB + NEO_KHZ800);
//Define the variable as the detected value
String request;
const char* ssid = "ChinaNet-2.4G-0DF0";
const char* pwd = "ChinaNet@233";
WiFiServer server(80); //Initialize the WiFi service
#include <LiquidCrystal_I2C.h>
LiquidCrystal_I2C lcd(0x27,16,2);
#include <dht11.h>
#define DHT11PIN 17
dht11 DHT11; // Initialize dht11
#include <BuzzerESP32.h>
#define buzzer_pin 25
BuzzerESP32 buzzer(buzzer_pin); // GPIO25
#define waterPin 34
#define fanPin1 19
#define fanPin2 18
#define led_y 12 // Yellow LED pin definition
#define gasPin 23
#define pyroelectric 14
// Servo channels
int channel_PWM1 = 13;
int channel_PWM2 = 10;
int freq_PWM = 50;
int resolution_PWM = 10;
const int PWM_Pin1 = 5;
const int PWM_Pin2 = 13;
String dataBuffer = "4095,0,0,32,65";
int Rainwater, gas, pir, t, h; //Define variables
unsigned long prevTask = 0;
void setup() {
Serial.begin(9600);
//Connect to WiFi
WiFi.begin(ssid, pwd);
//Determine whether it is connected
Serial.println("Connecting to WiFi...");
while (WiFi.status() != WL_CONNECTED) {
delay(1000);
Serial.print(".");
}
delay(1000);
//The serial monitor will display the name and IP address of the wireless network
Serial.println("Connected to WiFi");
Serial.print("WiFi NAME:");
Serial.println(ssid);
Serial.print("IP:");
Serial.println(WiFi.localIP());
//Initialize LCD
lcd.init();
//Turn on the LCD backlight
lcd.backlight();
//lcd.noBacklight();
lcd.clear();
//Set the position of the cursor
lcd.setCursor(0, 0);
//LCD printing
lcd.print("IP:");
//Set the position of the cursor
lcd.setCursor(0, 1);
//LCD printing
lcd.print(WiFi.localIP());
pinMode(led_y, OUTPUT);
pinMode(fanPin1, OUTPUT);
pinMode(fanPin2, OUTPUT);
pinMode(waterPin, INPUT);
buzzer.setTimbre(30); // Set timbre
buzzer.playTone(0,0); // Turn off buzzer
pinMode(gasPin, INPUT);
pinMode(pyroelectric, INPUT);
ledcAttach(PWM_Pin1, freq_PWM, resolution_PWM);
ledcAttachChannel(PWM_Pin1, freq_PWM, resolution_PWM, channel_PWM1);
ledcAttach(PWM_Pin2, freq_PWM, resolution_PWM);
ledcAttachChannel(PWM_Pin2, freq_PWM, resolution_PWM, channel_PWM2);
ledcWrite(PWM_Pin1, 25);
delay(500);
ledcWrite(PWM_Pin2, 25);
delay(500);
//Start the service
server.begin();
}
void loop() {
//Check whether the client has been connected to the network server
//When the client establishes a connection with the server, the "server.available()" function returns a WiFiClient object for client-side communication.
WiFiClient client = server.available();
if (client) {
Serial.println("New client connected");
while (client.connected()) {
//Determine whether the server sends data
if (client.available()) {
request = client.readStringUntil('s');
Serial.print("Received message: ");
Serial.println(request);
}
//Obtain all sensor data
getSensorsData();
//Put all the data into "dataBuffer"
dataBuffer = "";
dataBuffer += String(Rainwater);
dataBuffer += ",";
dataBuffer += String(gas);
dataBuffer += ",";
dataBuffer += String(pir);
dataBuffer += ",";
dataBuffer += String(t);
dataBuffer += ",";
dataBuffer += String(h);
//Send the data to the server and then transfer it to the application.
if (millis() - prevTask >= 1000) { // Execute every second
prevTask = millis();
client.print(dataBuffer);
}
delay(500);
//LED
if (request == "a") {
digitalWrite(led_y, HIGH);
} else if (request == "A") {
digitalWrite(led_y, LOW);
}
//window servo
if (request == "b") {
ledcWrite(PWM_Pin1, 100); //The high level of 20ms is approximately 2.5ms, that is, 2.5/20*1024, and the servo rotates at the specified Angle.
delay(500);
} else if (request == "B") {
ledcWrite(PWM_Pin1, 25); //The high level of 20ms is approximately 0.5ms, that is, 0.5/20*1024, and the servo rotates at the specified Angle.
delay(500);
}
//buzzer plays music
if (request == "c") {
birthday();
buzzer.playTone(0,0);
} else if (request == "C") {
buzzer.playTone(0,0);
}
//The buzzer sounds
if (request == "d") {
buzzer.playTone(392,250);
} else if (request == "D") {
buzzer.playTone(0,0);
}
//door servo
if (request == "e") {
ledcWrite(PWM_Pin2, 120);
delay(500);
} else if (request == "E") {
ledcWrite(PWM_Pin2, 25);
delay(500);
}
//fan
if (request == "f") {
digitalWrite(fanPin2, LOW); //pwm = 0
analogWrite(fanPin1, 100); //LEDC channel 5 is bound to the specified left motor output PWM value as 100.
} else if (request == "F") {
digitalWrite(fanPin2, LOW); //pwm = 0
analogWrite(fanPin1, 0); //LEDC channel 5 is bound to the specified left motor output PWM value as 0.
}
//SK6812RGB turns on and off its red light
if (request == "g") {
colorWipe(strip.Color(255, 0, 0), 50);
} else if (request == "G") {
colorWipe(strip.Color(0, 0, 0), 50);
}
//SK6812RGB turns on and off its orange light
if (request == "h") {
colorWipe(strip.Color(200, 100, 0), 50);
} else if (request == "H") {
colorWipe(strip.Color(0, 0, 0), 50);
}
//SK6812RGB turns on and off its yellow light
if (request == "i") {
colorWipe(strip.Color(200, 200, 0), 50);
} else if (request == "I") {
colorWipe(strip.Color(0, 0, 0), 50);
}
//SK6812RGB turns on and off its green light
if (request == "j") {
colorWipe(strip.Color(0, 255, 0), 50);
} else if (request == "J") {
colorWipe(strip.Color(0, 0, 0), 50);
}
//SK6812RGB turns on and off its blue-green light
if (request == "k") {
colorWipe(strip.Color(0, 100, 255), 50);
} else if (request == "K") {
colorWipe(strip.Color(0, 0, 0), 50);
}
//SK6812RGB turns on and off its blue light
if (request == "l") {
colorWipe(strip.Color(0, 0, 255), 50);
} else if (request == "L") {
colorWipe(strip.Color(0, 0, 0), 50);
}
//SK6812RGB turns on and off its purple light
if (request == "m") {
colorWipe(strip.Color(100, 0, 255), 50);
} else if (request == "M") {
colorWipe(strip.Color(0, 0, 0), 50);
}
//SK6812RGB turns on and off its white light
if (request == "n") {
colorWipe(strip.Color(255, 255, 255), 50);
} else if (request == "N") {
colorWipe(strip.Color(0, 0, 0), 50);
}
//SK6812RGB-sfx1
if (request == "o") {
rainbow(10);
} else if (request == "O") {
colorWipe(strip.Color(0, 0, 0), 50);
}
//SK6812RGB-sfx2
if (request == "p") {
theaterChaseRainbow(50);
} else if (request == "P") {
colorWipe(strip.Color(0, 0, 0), 50);
}
request = "";
}
Serial.println("Client disconnected");
}
}
void getSensorsData() {
//Obtain data
int chk = DHT11.read(DHT11PIN);
t = DHT11.temperature;
h = DHT11.humidity;
//steam sensor
Rainwater = analogRead(waterPin); //read steam sensor analog value and assign it to variable Rainwater
//gas sensor
gas = digitalRead(gasPin); //read gas sensor analog value and assign it to variable gas
//PIR motion sensor
pir = digitalRead(pyroelectric); //read PIR motion sensor analog value and assign it to variable gas
}
//Convert the data into percentages
String dataHandle(int data) {
// Convert the analog values to percentages
int percentage = (data / 4095.0) * 100;
// If the converted percentage is greater than 100, output 10.
percentage = percentage > 100 ? 100 : percentage;
// Six characters are used to store a hexadecimal string, with one serving as the terminator
char hexString[3];
// Convert the hexadecimal value to a 6-bit hexadecimal string and add leading zeros in front: 0 represents 00, 1 represents 01...
sprintf(hexString, "%02X", percentage);
return hexString;
}
void birthday()
{
buzzer.playTone(294,250); //The four parameters are frequency, delay, etc
buzzer.playTone(440,250);
buzzer.playTone(392,250);
buzzer.playTone(532,250);
buzzer.playTone(494,250);
buzzer.playTone(392,250);
buzzer.playTone(440,250);
buzzer.playTone(392,250);
buzzer.playTone(587,250);
buzzer.playTone(532,250);
buzzer.playTone(392,250);
buzzer.playTone(784,250);
buzzer.playTone(659,250);
buzzer.playTone(532,250);
buzzer.playTone(494,250);
buzzer.playTone(440,250);
buzzer.playTone(698,250);
buzzer.playTone(659,250);
buzzer.playTone(532,250);
buzzer.playTone(587,250);
buzzer.playTone(532,500);
buzzer.playTone(0,0); //off
}
void colorWipe(uint32_t color, int wait) {
for(int i=0; i<strip.numPixels(); i++) { // For each pixel in the strip...
strip.setPixelColor(i, color); // Set the color of the pixels (in RAM)
strip.show(); // Update the stripe to match
delay(wait); // delay
}
}
// The rainbow circulates along the entire band. Transfer the delay time (in milliseconds) between frames.
void rainbow(int wait) {
for(long firstPixelHue = 0; firstPixelHue < 5*65536; firstPixelHue += 256) {
for(int i=0; i<strip.numPixels(); i++) { // For each pixel in strip...
int pixelHue = firstPixelHue + (i * 65536L / strip.numPixels());
strip.setPixelColor(i, strip.gamma32(strip.ColorHSV(pixelHue)));
}
strip.show(); // Update strip content
delay(wait); // delay
}
}
// Rainbow-enhanced Marquise-style. Transfer delay time (milliseconds) between frames
void theaterChaseRainbow(int wait) {
int firstPixelHue = 0; // The first pixel starts from red (hue 0).
for(int a=0; a<30; a++) { // Repeat 30 times...
for(int b=0; b<3; b++) { // 'b' counts from 0 to 2...
strip.clear(); // Set all pixels in RAM to 0(off)
// 'c' is counted starting from 'b' and increments in units of 3...
for(int c=b; c<strip.numPixels(); c += 3) {
int hue = firstPixelHue + c * 65536L / strip.numPixels();
uint32_t color = strip.gamma32(strip.ColorHSV(hue)); // color -> RGB
strip.setPixelColor(c, color); // Set the value of pixel c to color
}
strip.show(); // Update strip content
delay(wait); // delay
firstPixelHue += 65536 / 90; // The color wheel of one cycle exceeds 90 frames
}
}
}
3. Testergebnis
⚠️ Hinweis: Das Mobiltelefon oder Tablet muss über dasselbe WiFi mit dem ESP32 Development Board verbunden sein. Andernfalls kann nicht auf die Steuerungsseite zugegriffen werden. Außerdem verbraucht das ESP32 Development Board bei Verwendung der WiFi-Funktion viel Strom. Eine externe Gleichstromversorgung ist erforderlich, um seinen Strombedarf für den Betrieb zu decken. Wird der Strombedarf nicht gedeckt, startet das ESP32-Board ständig neu, wodurch der Code nicht normal ausgeführt werden kann.
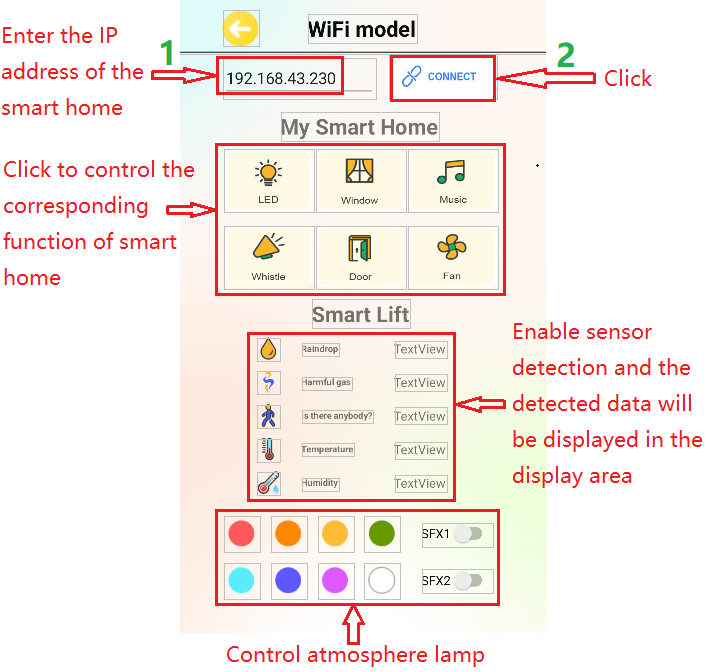
A. Geben Sie die IP-Adresse in der App ein (die zugewiesene IP-Adresse wird auf dem LCD1602 oder im Serial Monitor-Fenster der IDE angezeigt).
B. Klicken Sie auf “CONNECT”, um eine Verbindung zur IP-Adresse herzustellen.
C. Die erfolgreiche Verbindung wird durch das Auftauchen des Wortes “Connected” angezeigt. Bitte achten Sie darauf.
D. Nachdem die IP-Adresse verbunden ist, klicken Sie in der App-Oberfläche die entsprechende Taste, um das jeweilige Sensormodul zu steuern.