Проект 13: Ультразвуковой датчик

Описание
Ультразвуковой датчик HC-SR04 — это широко используемый датчик для измерения расстояния, который измеряет расстояние между объектом и датчиком. Датчик имеет небольшой размер, низкую цену и прост в использовании, поэтому он получил широкое применение в робототехнике, умном доме и промышленном контроле.
В этом проекте мы создаём систему измерения расстояния с помощью платы разработки UNO R3 (ch340) и ультразвукового датчика HC-SR04. В ходе проекта вы научитесь измерять расстояние между объектом и датчиком с использованием HC-SR04 и отображать результаты измерений в серийном мониторе.
Аппаратное обеспечение
1. Плата разработки UNO R3 (ch340) x1
2. Ультразвуковой датчик HC-SR04 x1
3. Провода DuPont
Принцип работы
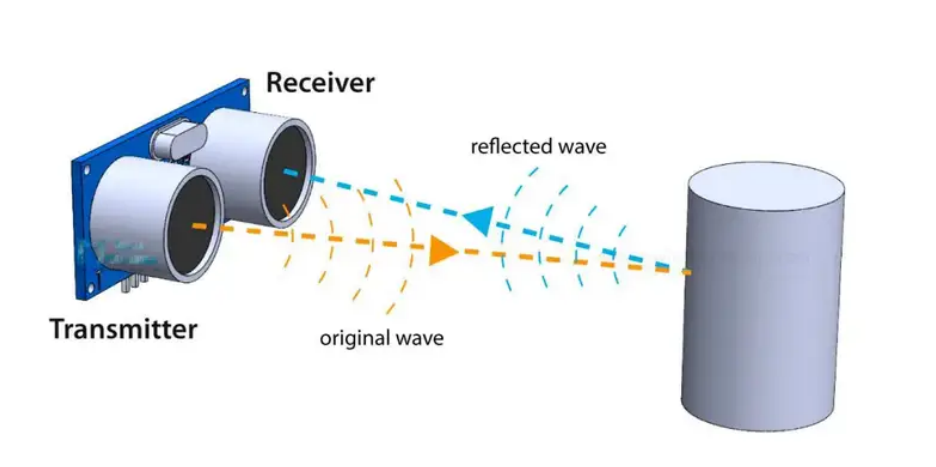
Датчик излучает ультразвук с частотой 40 000 Гц, который распространяется в воздухе, и если на его пути есть объект или препятствие, сигнал отражается обратно к модулю. Учитывая время прохождения сигнала и скорость звука, можно вычислить расстояние.
Для генерации ультразвука необходимо установить пин Trig в высокий уровень на 10 мкс. Это отправит 8 циклов ультразвукового сигнала, который будет распространяться со скоростью звука. Пин Echo сразу же переходит в высокий уровень после отправки этих 8 циклов и начинает ожидать отражённую волну от объекта.
Если отражённого сигнала нет, пин Echo перейдёт в низкий уровень по тайм-ауту через 38 мс.
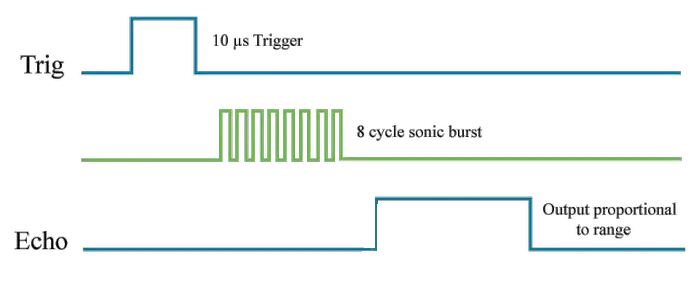
Если отражённый сигнал получен, пин Echo перейдёт в низкий уровень раньше 38 мс. По времени, в течение которого пин Echo был в высоком состоянии, можно определить расстояние, которое прошла звуковая волна, а значит, и расстояние от датчика до объекта.
Для этого используется базовая формула расчёта расстояния:
Расстояние = Скорость x Время
Мы знаем как скорость, так и время. Время — это продолжительность высокого уровня на пине Echo, а скорость — скорость звука, равная 340 м/с. Дополнительно нужно разделить результат на 2, так как измеряется время прохождения волны туда и обратно.
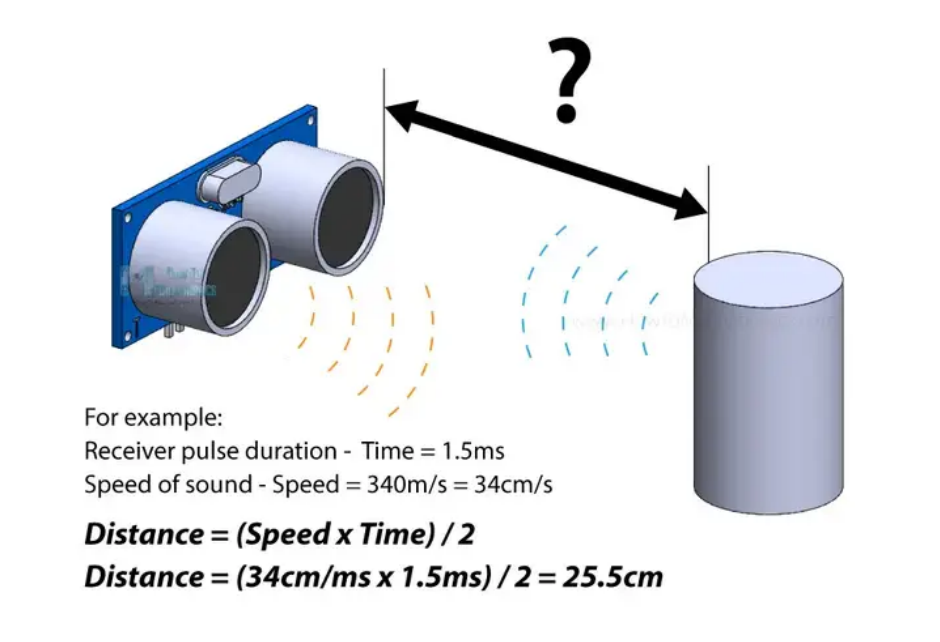
Предположим, пин Echo был в высоком состоянии 2 мс. Чтобы получить результат в сантиметрах, скорость звука переводим из 340 м/с в 34 см/мс.
Расстояние = (Скорость x Время) / 2 = (34 см/мс x 1.5 мс) / 2 = 25.5 см.
Таким образом, если пин Echo был высоким 2 мс (что измеряется функцией pulseIn()), расстояние от датчика до объекта составляет 34 см.
Технические характеристики
Рабочее напряжение: DC 5V
Рабочий ток: 15 мА
Рабочая частота: 40 КГц
Максимальный диапазон: 4 м
Минимальный диапазон: 2 см
Угол измерения: 15 градусов
Сигнал запуска (Trigger): импульс TTL длительностью 10 мкс
Сигнал эха (Echo): входной TTL сигнал, пропорциональный расстоянию
Распиновка
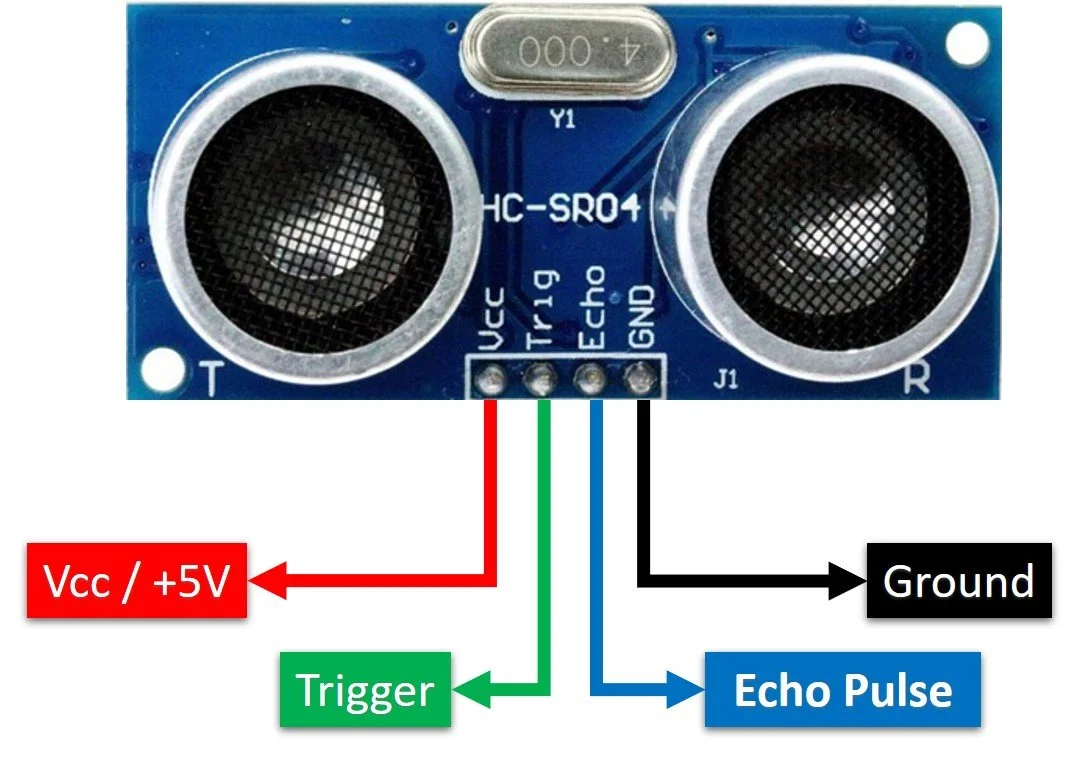
VCC подаёт питание на ультразвуковой датчик HC-SR04. Его можно подключить к выходу 5V на Arduino.
Пин Trig (Trigger) используется для запуска ультразвуковых импульсов. Установка этого пина в высокий уровень на 10 мкс инициирует ультразвуковой импульс.
Пин Echo становится высоким при передаче ультразвукового импульса и остаётся высоким до получения отражённого сигнала, после чего переходит в низкий уровень. Измеряя время высокого уровня на пине Echo, можно вычислить расстояние.
GND — это земля. Подключите его к земле Arduino.
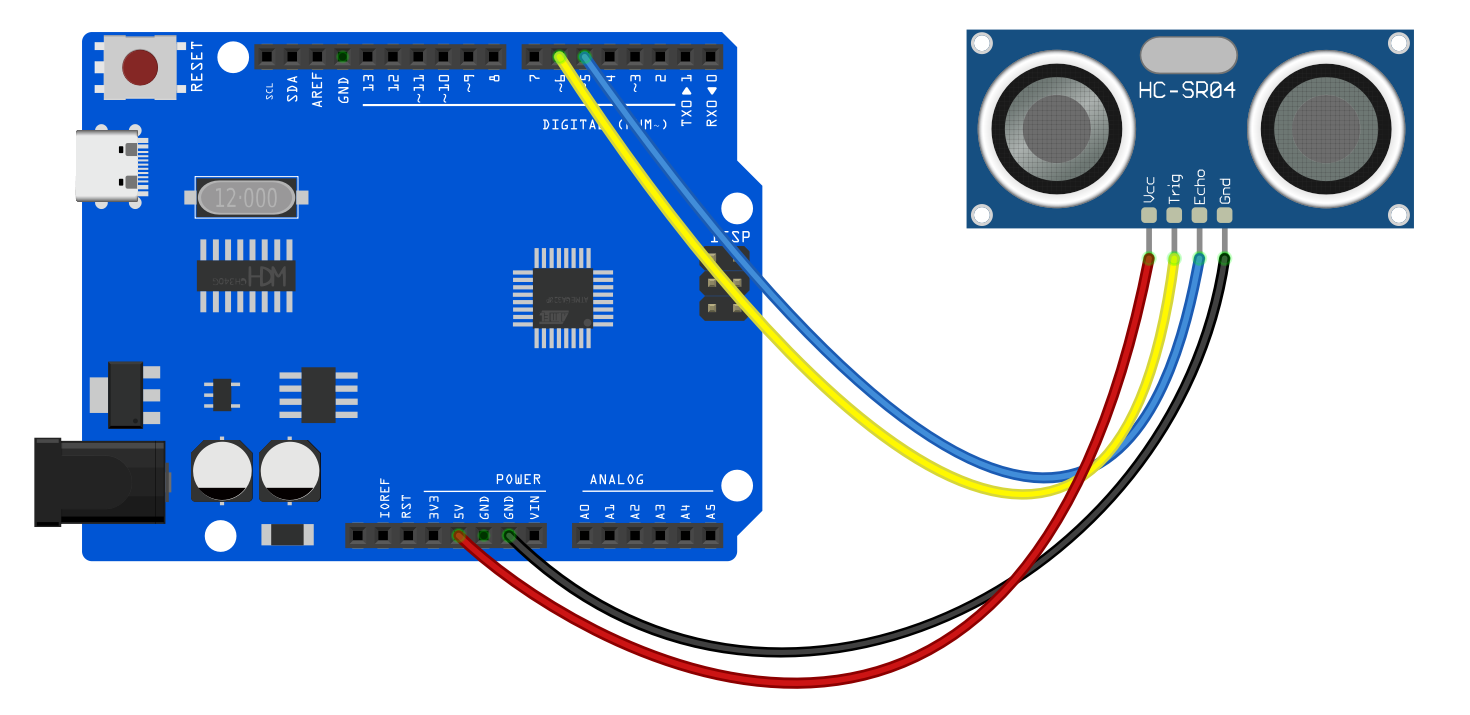
Схема подключения
1. Подключите VCC ультразвукового датчика к 5V на плате
2. Подключите пин Trig ультразвукового датчика к цифровому пину D6 на плате
3. Подключите пин Echo ультразвукового датчика к цифровому пину D5 на плате
4. Подключите пин GND ультразвукового датчика к GND на плате
Пример кода
/*
Electronics Learning Starter Kit for Arduino
Project 13
Ultrasonic Sensor
Edit By Keyes
*/
const int trigPin = 6; // Define trigger pin number
const int echoPin = 5; // Define echo pin number
long duration; // Declare a long integer variable for storing the round-trip time of the ultrasonic pulse
int distance; // Declare an integer variable for storing the calculated distance
void setup() {
pinMode(trigPin, OUTPUT); // Set trigPin as output
pinMode(echoPin, INPUT); // Set echoPin as input
Serial.begin(9600); // Initialize serial communication with a baud rate of 9600
}
void loop() {
digitalWrite(trigPin, LOW); // Ensure the trigger pin is low
delayMicroseconds(2); // Wait for 2 microseconds
digitalWrite(trigPin, HIGH); // Send a 10-microsecond pulse
delayMicroseconds(10); // Keep the pulse for 10 microseconds
digitalWrite(trigPin, LOW); // End the pulse
duration = pulseIn(echoPin, HIGH); // Read the length of the pulse from the echo pin
// Calculate distance: sound speed is 0.034 cm per microsecond, divide the round-trip distance by 2
distance = duration * 0.034 / 2;
Serial.print("Distance: "); // Print text "Distance: "
Serial.print(distance); // Print the measured distance
Serial.println(" cm"); // Print the unit " cm" and go to the next line
delay(500); // Wait for 0.5 seconds before measuring again
}
Объяснение кода
Определение пинов и переменных
const int trigPin = 6;
const int echoPin = 5;
long duration;
int distance;
В этом разделе определяются две константы trigPin и echoPin, которые соответствуют номерам цифровых пинов на плате Arduino, подключённых к пинам Trig и Echo датчика HC-SR04. Также объявляются две переменные duration и distance для хранения времени сигнала эха и вычисленного расстояния.
Функция настройки
void setup() {
pinMode(trigPin, OUTPUT);
pinMode(echoPin, INPUT);
Serial.begin(9600);
}
Функция setup() — стандартная функция инициализации в коде Arduino, которая устанавливает режимы пинов и инициализирует последовательную связь. pinMode(trigPin, OUTPUT) и pinMode(echoPin, INPUT) устанавливают пин Trig как выход, а пин Echo как вход. Serial.begin(9600) запускает последовательный порт и задаёт скорость передачи данных 9600 бит в секунду, что позволяет выводить данные в серийный монитор на компьютере.
Основной цикл
void loop() {
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
distance = duration * 0.034 / 2;
Serial.print("Distance: ");
Serial.print(distance);
Serial.println(" cm");
delay(500);
}
Функция loop() содержит основную логику программы и выполняется повторно. Сначала пин Trig устанавливается в низкий уровень и удерживается 2 микросекунды для стабилизации сигнала. Затем пин Trig устанавливается в высокий уровень на 10 микросекунд, что запускает отправку ультразвукового импульса. После этого пин Trig возвращается в низкий уровень и ждёт получения эха на пине Echo.
duration = pulseIn(echoPin, HIGH); измеряет время, в течение которого пин Echo находится в высоком уровне (то есть время прохождения ультразвуковой волны туда и обратно). distance = duration * 0.034 / 2; вычисляет расстояние, исходя из скорости звука (примерно 340 метров в секунду или 0.034 сантиметра в микросекунду). Поскольку волна проходит путь туда и обратно, результат делится на 2.
В конце вычисленное расстояние выводится через последовательный порт, после чего происходит задержка в 500 миллисекунд перед следующим измерением.
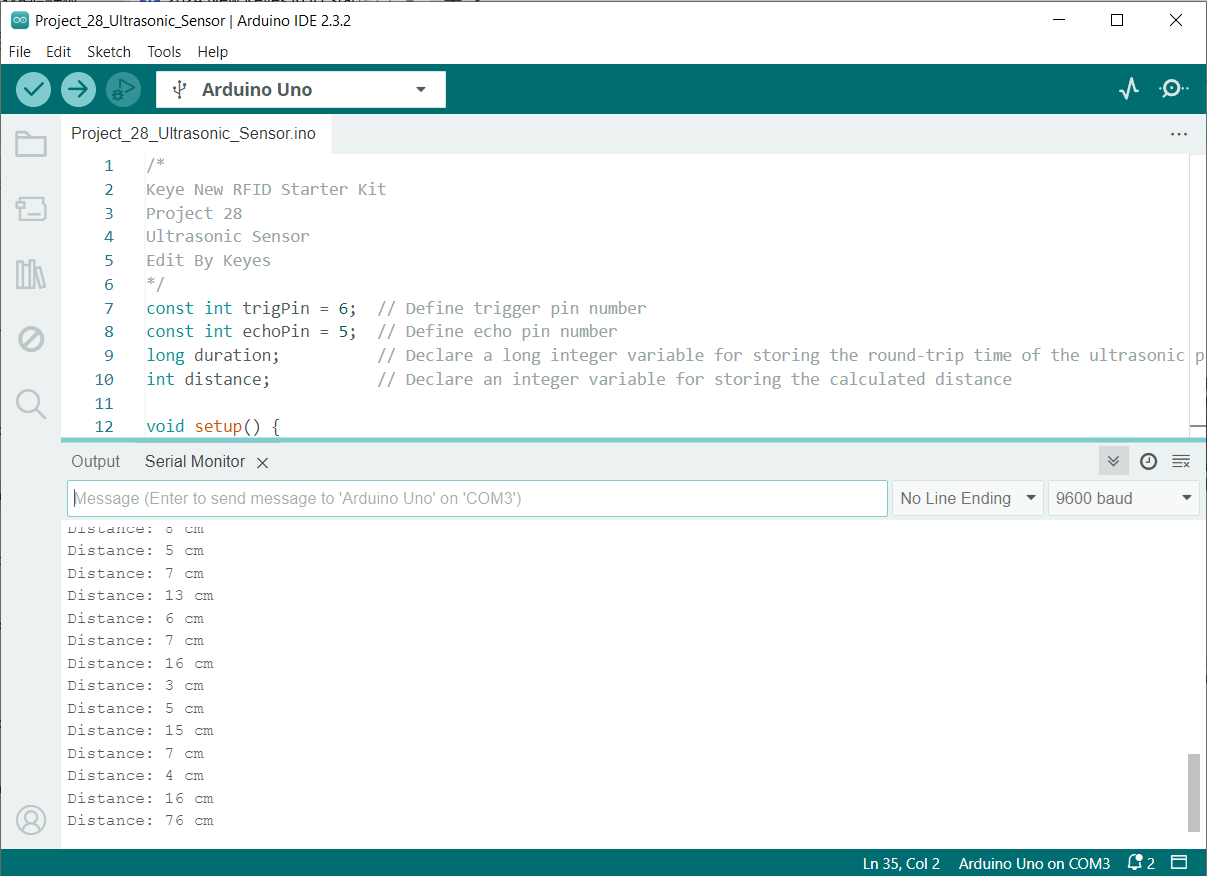
Результат проекта
После загрузки кода откройте серийный монитор и установите скорость передачи 9600. Значение расстояния будет выводиться в мониторе в сантиметрах. При приближении или удалении объекта от датчика значение будет изменяться.