Проект 31: Модуль MPU6050
Описание
MPU6050 — это мощное 6-осевое устройство отслеживания движения, которое объединяет 3-осевой гироскоп и 3-осевой акселерометр на одном кремниевом кристалле. Он широко используется в дронах, балансировочных роботах и устройствах с управлением движением. В этом проекте мы научимся считывать данные ускорения и вращения с модуля MPU6050 с помощью протокола связи I2C.
Аппаратное обеспечение
Плата разработки UNO R3 (ch340) x1
Модуль MPU6050 x1
Макетная плата x1
Соединительные провода
Принцип работы
MPU6050 состоит из двух основных датчиков:
Акселерометр: Измеряет силы ускорения, действующие на датчик по осям X, Y и Z. Это можно использовать для определения угла наклона датчика относительно земного притяжения.
Гироскоп: Измеряет скорость вращения вокруг осей X, Y и Z. Это помогает отслеживать ориентацию и вращательное движение.
Модуль взаимодействует с Arduino через протокол I2C (Inter-Integrated Circuit), который требует всего две линии данных: SDA (Serial Data) и SCL (Serial Clock). Arduino запрашивает данные из внутренних регистров MPU6050, а модуль отправляет обратно необработанные значения датчиков.
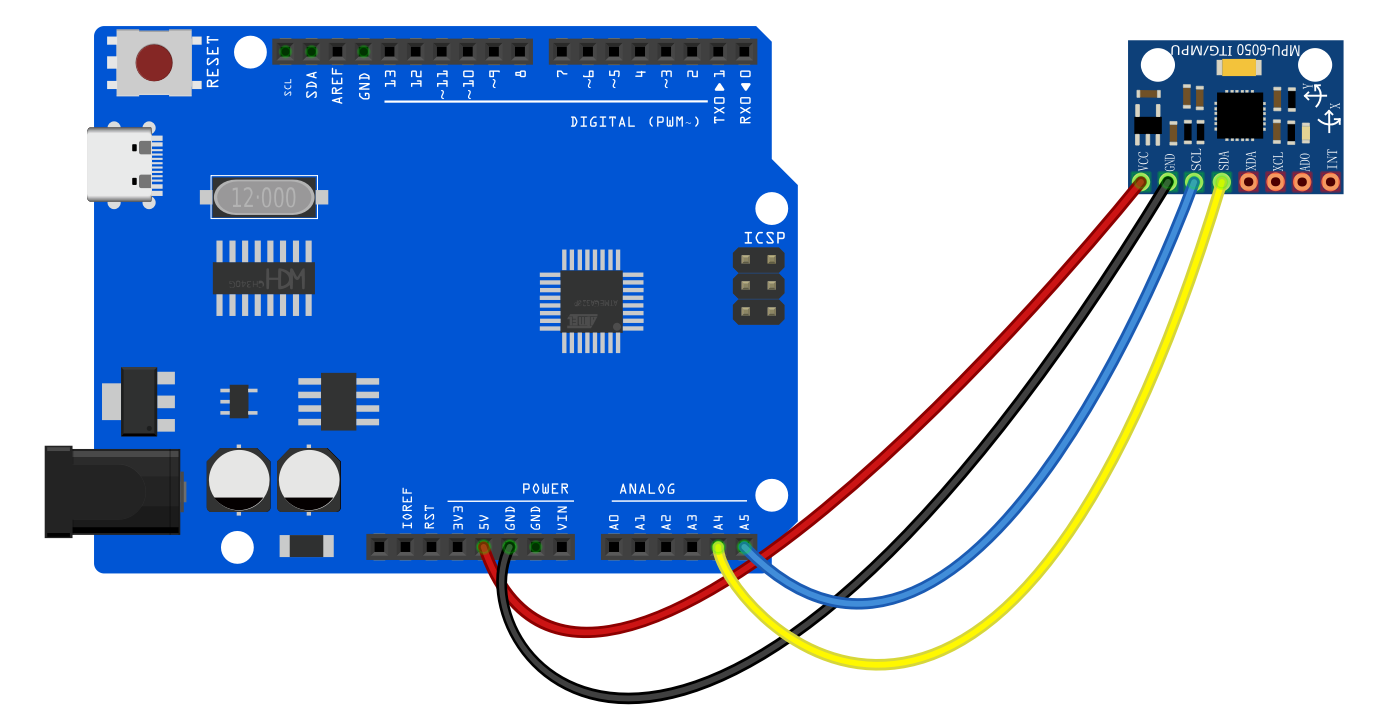
Схема подключения
Подключите VCC MPU6050 к 5V на плате.
Подключите GND MPU6050 к GND на плате.
Подключите SCL MPU6050 к A5 (или пину SCL) на плате.
Подключите SDA MPU6050 к A4 (или пину SDA) на плате.
Пример кода
/*
Electronics Learning Starter Kit for Arduino
Project 31
MPU6050 Module
Edit By Keyes
*/
#include <Wire.h>
const int MPU_addr=0x68; // I2C address of the MPU-6050
int16_t AcX,AcY,AcZ,Tmp,GyX,GyY,GyZ;
void setup(){
Wire.begin();
Wire.beginTransmission(MPU_addr);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
Serial.begin(9600);
}
void loop(){
Wire.beginTransmission(MPU_addr);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU_addr,14,true); // request a total of 14 registers
AcX=Wire.read()<<8|Wire.read(); // 0x3B (ACCEL_XOUT_H) & 0x3C (ACCEL_XOUT_L)
AcY=Wire.read()<<8|Wire.read(); // 0x3D (ACCEL_YOUT_H) & 0x3E (ACCEL_YOUT_L)
AcZ=Wire.read()<<8|Wire.read(); // 0x3F (ACCEL_ZOUT_H) & 0x40 (ACCEL_ZOUT_L)
Tmp=Wire.read()<<8|Wire.read(); // 0x41 (TEMP_OUT_H) & 0x42 (TEMP_OUT_L)
GyX=Wire.read()<<8|Wire.read(); // 0x43 (GYRO_XOUT_H) & 0x44 (GYRO_XOUT_L)
GyY=Wire.read()<<8|Wire.read(); // 0x45 (GYRO_YOUT_H) & 0x46 (GYRO_YOUT_L)
GyZ=Wire.read()<<8|Wire.read(); // 0x47 (GYRO_ZOUT_H) & 0x48 (GYRO_ZOUT_L)
Serial.print("AcX = "); Serial.print(AcX);
Serial.print(" | AcY = "); Serial.print(AcY);
Serial.print(" | AcZ = "); Serial.print(AcZ);
Serial.print(" | Tmp = "); Serial.print(Tmp/340.00+36.53); // equation for temperature in degrees C from datasheet
Serial.print(" | GyX = "); Serial.print(GyX);
Serial.print(" | GyY = "); Serial.print(GyY);
Serial.print(" | GyZ = "); Serial.println(GyZ);
delay(500);
}
Объяснение кода
Инициализация I2C:
Wire.begin();
Wire.beginTransmission(MPU_addr);
Wire.write(0x6B); // PWR_MGMT_1 register
Wire.write(0); // set to zero (wakes up the MPU-6050)
Wire.endTransmission(true);
Библиотека Wire используется для связи по I2C. Сначала мы «пробуждаем» MPU6050, записывая 0 в его регистр управления питанием (0x6B).
Чтение данных:
Wire.beginTransmission(MPU_addr);
Wire.write(0x3B); // starting with register 0x3B (ACCEL_XOUT_H)
Wire.endTransmission(false);
Wire.requestFrom(MPU_addr,14,true); // request a total of 14 registers
Мы сообщаем MPU6050, что хотим начать чтение с регистра 0x3B (который содержит старший байт ускорения по оси X). Затем запрашиваем всего 14 байт данных, что покрывает 3-осевое ускорение, температуру и 3-осевой гироскоп (каждое значение занимает 2 байта).
Объединение байт:
AcX=Wire.read()<<8|Wire.read();
Поскольку каждое значение датчика занимает 16 бит (2 байта), мы читаем старший байт, сдвигаем его влево на 8 бит (<<8) и используем побитовое ИЛИ (|) с младшим байтом, чтобы объединить их в одно 16-битное целое число.
Результат проекта
После загрузки кода откройте монитор порта и установите скорость передачи 9600 бод. Вы увидите непрерывный поток данных, показывающий значения ускорения (AcX, AcY, AcZ), температуры (Tmp) и гироскопа (GyX, GyY, GyZ). Попробуйте наклонять и вращать модуль MPU6050 и наблюдайте, как значения меняются в реальном времени!