Проект 30: Управление движением с помощью джойстика
Описание
В этом проекте демонстрируется, как использовать Arduino для считывания аналоговых сигналов с двухосевого джойстика и ручного управления вращением шагового двигателя. Перемещая джойстик, вы можете точно контролировать вращение шагового двигателя вперед, назад или остановку.
Такой тип управления часто используется в роботизированных гимбалах, ручном обучении суставов роботизированных рук, перемещении микроскопного стола и других автоматизированных устройствах. Это отличный базовый проект для понимания «человеко-машинного взаимодействия».
Аппаратное обеспечение
Плата разработки UNO R3 (CH340) × 1
Шаговый двигатель 28BYJ-48 × 1
Плата драйвера шагового двигателя ULN2003 × 1
Двухосевой модуль джойстика × 1
Макетная плата × 1
Провода Dupont/соединительные провода × несколько
Принцип работы
Основная задача проекта — преобразовать выходное напряжение джойстика в команды движения для шагового двигателя.
Аналоговый выход джойстика: Внутри джойстика находятся два потенциометра (переменных резистора). При перемещении джойстика по оси X, на выводе
VRxпоявляется изменяющееся напряжение. Arduino считывает это напряжение через аналоговый вход (A0) и преобразует его в значение от0до1023.Центральное положение и пороги: Когда джойстик находится в центре, значение примерно равно
512. В коде установлены следующие пороги:Если значение меньше 300 (джойстик отклонён в одну сторону), шаговый двигатель вращается непрерывно вперед.
Если значение больше 800 (джойстик отклонён в другую сторону), шаговый двигатель вращается непрерывно назад.
Если значение между 300 и 800 (джойстик в центре/отпущен), питание шагового двигателя отключается, и он остаётся неподвижным.
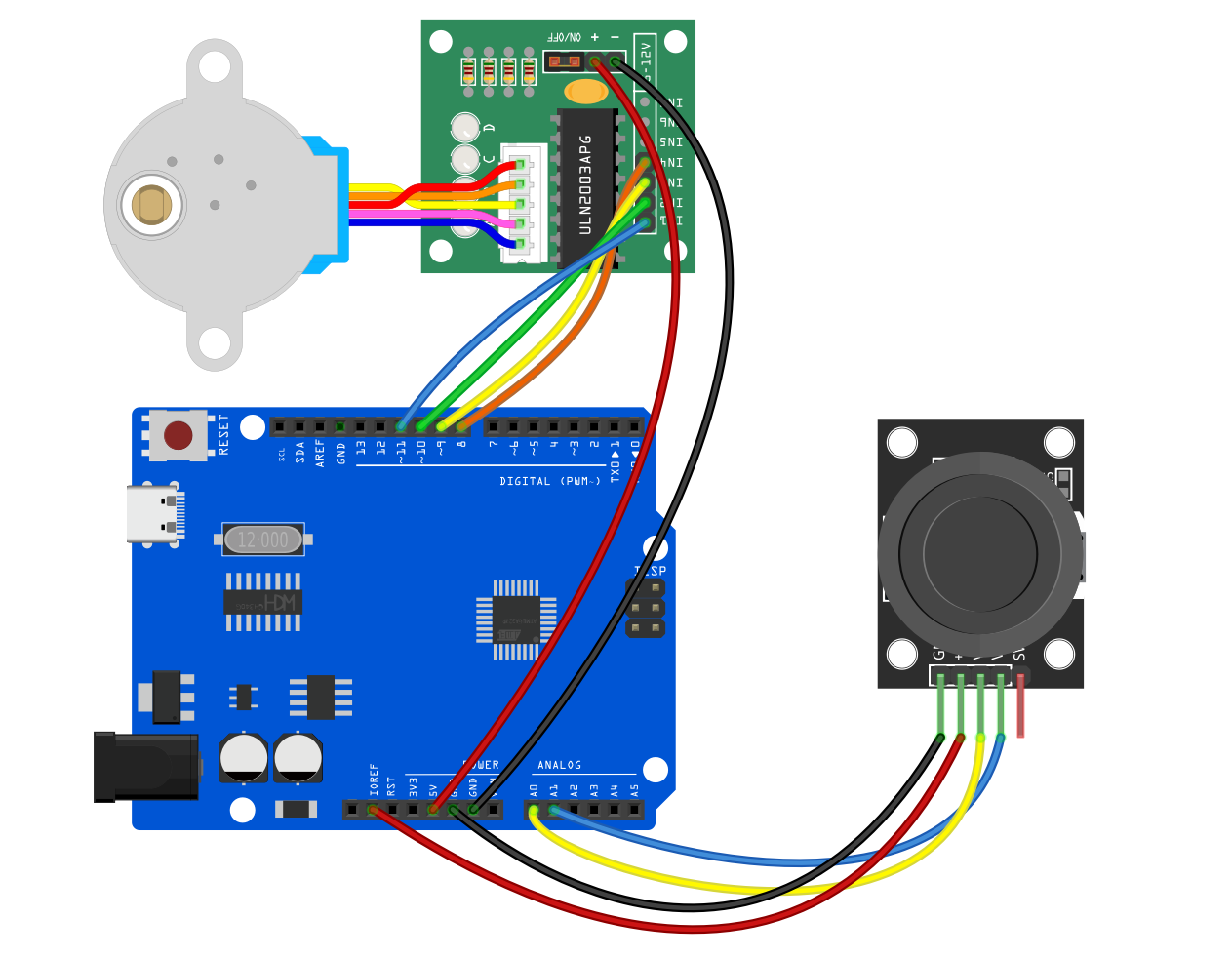
Схема подключения
1. Модуль джойстика
(Примечание: в этом проекте управляется только одноосевой шаговый двигатель, поэтому подключается только ось X. Выводы оси Y VRy и кнопки SW можно не подключать.)
VRx (аналоговый выход по оси X)➔ Подключить к Arduino A0VCC➔ Подключить к Arduino 5VGND➔ Подключить к Arduino GND
2. Шаговый двигатель и плата драйвера (ULN2003)
Вставьте белый разъём шагового двигателя в гнездо платы драйвера ULN2003.
IN1➔ Подключить к Arduino D8IN2➔ Подключить к Arduino D10 (Обратите внимание на порядок: для встроенной библиотеки Stepper Arduino порядок должен быть 8, 10, 9, 11)IN3➔ Подключить к Arduino D9IN4➔ Подключить к Arduino D11+ (VCC)➔ Подключить к Arduino 5V (или внешнему источнику 5V)- (GND)➔ Подключить к Arduino GND
Пример кода
Скопируйте и загрузите следующий код в вашу Arduino:
/*
Electronics Learning Starter Kit for Arduino
Project 30
Joystick Motion Control
Edit By Keyes
*/
#include <Stepper.h>
// Define the number of steps per revolution for the stepper motor (28BYJ-48 is usually 2048 steps)
const int stepsPerRevolution = 2048;
// Initialize the stepper motor object, note the pin order is 8, 10, 9, 11
Stepper myStepper(stepsPerRevolution, 8, 10, 9, 11);
void setup() {
// Set the stepper motor speed to 10 RPM (revolutions per minute)
myStepper.setSpeed(10);
// Initialize serial communication for monitoring joystick values
Serial.begin(9600);
}
void loop() {
// 1. Read the joystick X-axis analog value (range 0 - 1023)
int xValue = analogRead(A0);
// Print the current value to the serial monitor for debugging
Serial.print("Joystick X-axis value: ");
Serial.println(xValue);
// 2. Determine joystick direction and control the motor
if (xValue < 300) {
// Joystick pushed to one side: step motor forward
myStepper.step(10);
}
else if (xValue > 800) {
// Joystick pushed to the other side: step motor backward
myStepper.step(-10);
}
else {
// Joystick in neutral position (300 ~ 800)
// De-energize all coils to prevent the stepper motor from overheating while idle
digitalWrite(8, LOW);
digitalWrite(9, LOW);
digitalWrite(10, LOW);
digitalWrite(11, LOW);
}
}
Объяснение кода
Подключение библиотеки и инициализация:
#include <Stepper.h>подключает библиотеку управления шаговым двигателем. СтрокаStepper myStepper(stepsPerRevolution, 8, 10, 9, 11);задаёт управляющие пины. Важно: при использовании этой официальной библиотеки с мотором 28BYJ-48 необходимо поменять местами средние два пина (то есть 10, 9 вместо 9, 10) для плавного вращения двигателя.Считывание аналогового значения:
analogRead(A0)непрерывно считывает наклон джойстика, возвращая число от 0 до 1023.Реакция на движение (
step): Каждая итерация цикла сдвигает мотор на небольшой шаг (10или-10шагов). Поскольку цикл выполняется очень быстро, удержание джойстика в одном направлении приводит к непрерывному и плавному вращению мотора.Защита при отключении питания (
digitalWrite(..., LOW)): Шаговые двигатели склонны блокировать вал при остановке, так как катушки остаются под напряжением. Чтобы этого избежать и снизить нагрев, когда джойстик в центре (отпущен), все четыре управляющих пина устанавливаются в LOW, отключая ток в катушках и защищая мотор и драйвер от перегрева.
Результат проекта
После загрузки кода и подачи питания на схему:
Нейтральное состояние: Когда джойстик не трогают, он автоматически возвращается в центр, и шаговый двигатель остаётся неподвижным без нагрева.
Отклонение влево/вниз: Перемещение джойстика в одну сторону (значение < 300) заставляет шаговый двигатель вращаться непрерывно по часовой (или против часовой) стрелке.
Отклонение вправо/вверх: Перемещение джойстика в противоположную сторону (значение > 800) мгновенно меняет направление вращения двигателя для непрерывного вращения.
Реакция в реальном времени: При отпускании джойстика он возвращается в центр, и мотор мгновенно тормозит и останавливается. Открыв монитор порта на компьютере, вы можете наблюдать изменения данных джойстика в реальном времени.