プロジェクト04:スマート駐車
1. 概要
スマート駐車場はどこにでもあります。私たちもスマート駐車場を作ることができるでしょうか?もちろんです。超音波センサーを使って前方に車両があるかどうかを検出します。車両(または物)が近づいていると検出したら、サーボを制御してリフトロッドを上げます。離れていると検出したら、サーボはリフトロッドを下げます。
2. コンポーネント
|
|
|
|---|---|---|
micro:bit ボード *1 |
micro:bit T型拡張ボード *1 |
micro USB ケーブル *1 |
|
|
|
超音波センサー *1 |
サーボ *1 |
DuPont ワイヤー |
|
|
|
ブレッドボード *1 |
ジャンプワイヤー |
電池ホルダー *1 |
|
|
|
バットカード *1 |
リフトロッドカード *1 |








3. コンポーネントの知識
サーボ
サーボは位置駆動装置です。サーボを使って正確な位置制御や高トルクの出力が可能です。通常、ロボットやリモコンカー、さらには航空機モデルに使われます。多くの仕様がありますが、すべてのサーボは3本の線を持っています:信号線(オレンジ)、プラス線(赤)、マイナス線(茶色)。色はサーボのブランドによって異なります。

内部構造図:
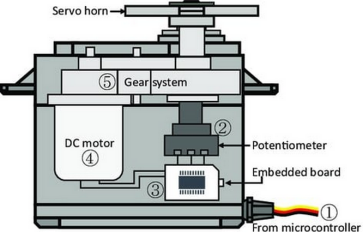
① 信号:マイコンからの制御信号を受け取る;
② ポテンショメーター:出力軸の位置を測定し、サーボ全体のフィードバック部分に属する;
③ 内部コントローラー:組み込み基板が外部制御からの信号を処理し、モーターとフィードバック位置信号を駆動する。サーボ全体のコア;
④ DCモーター:速度、トルク、位置を出力するアクチュエーター;
⑤ 伝達/サーボ機構:モーターのストローク出力を一定の伝達比で最終出力角度に拡大する機構。
サーボの駆動
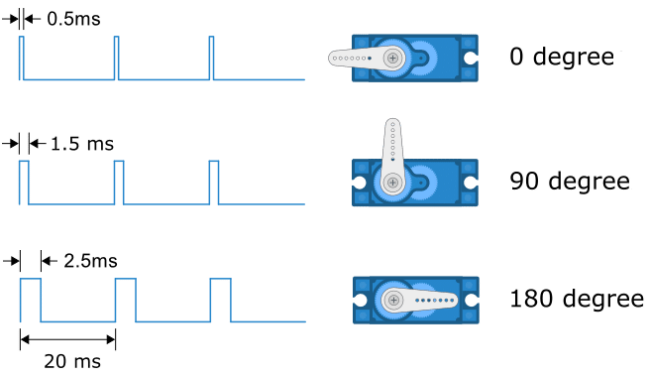
PWM信号をサーボの信号線に送って出力を制御します。PWMのデューティ比が出力軸の位置を直接決定します。周期は通常20ミリ秒で、50Hzの周波数でパルスを生成するように設定されます。
例えば(180°サーボ):
180°サーボに1.5ミリ秒(ms)のパルス幅を送ると、サーボの出力軸は中央位置(90度)に動きます;
パルス幅が0.5msの場合、出力軸は0度に動きます;
パルス幅が2.5msの場合、出力軸は180度に動きます;
パラメータ:
動作電圧:DC 3.3V~5V
動作温度:-10°C ~ +50°C
寸法:32.25mm x 12.25mm x 30.42mm
インターフェース:ピッチ2.54mmの3ピンインターフェース
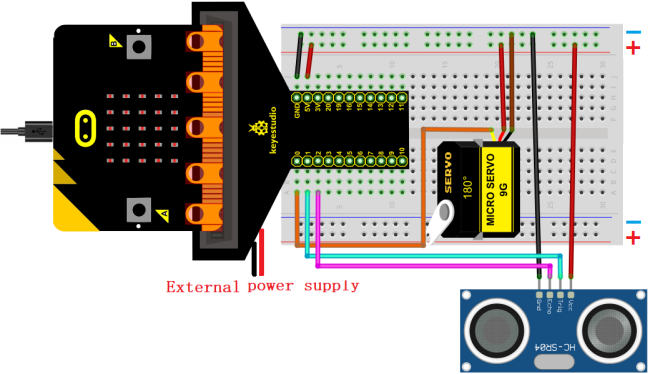
4. 配線図
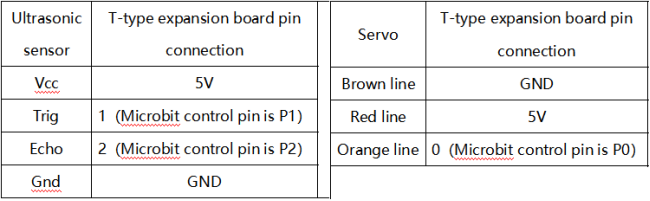
超音波センサーとサーボを使用する場合は、必ず外部電源を接続し、DIPスイッチをONにしてください。

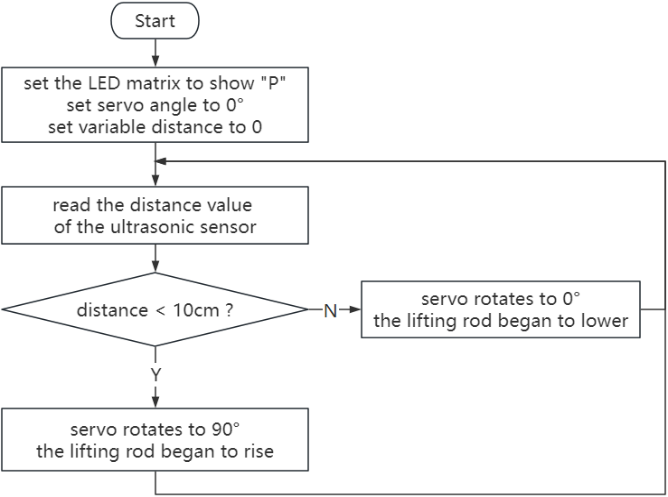
5. コードフロー
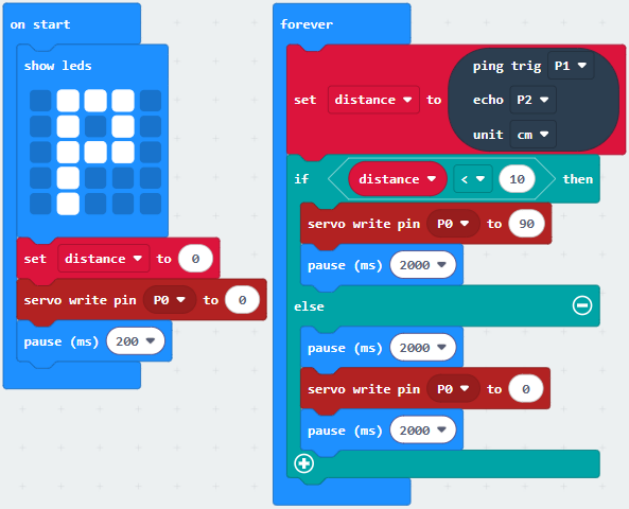
6. テストコード
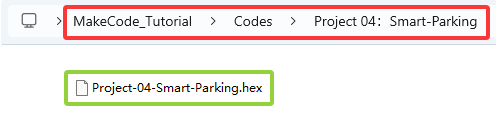
コードファイルはフォルダ Project 04:Smart-Parking 内のファイル Project-04-Smart-Parking.hex にあります。
コードブロックの読み込み: 条件10の閾値は実際の状況に応じて変更可能です。
7. テスト結果
コードをボードにダウンロードした後、超音波センサーが車両(または物)が近づいていると検出すると、サーボがリフトロッドを上げます。センサーが離れていると検出すると、サーボはリフトロッドを下げます。
注意: 配線が正しいのに結果が見えない場合は、ボードの裏側のリセットボタンを押してください。