プロジェクト04:スマート駐車
1. 概要
スマート駐車場はどこにでもあります。私たちもスマート駐車場を作ることができるでしょうか?もちろんです。超音波センサーを使って前方に車両があるかどうかを検出します。車両(または物)が近づいてくるのを検出したら、サーボを制御してリフトロッドを上げます。離れていくのを検出したら、サーボはリフトロッドを下げます。
2. 部品
|
|
|
|---|---|---|
micro:bit ボード *1 |
micro:bit T型拡張ボード *1 |
micro USB ケーブル *1 |
|
|
|
超音波センサー *1 |
サーボ *1 |
DuPont ワイヤー |
|
|
|
ブレッドボード *1 |
ジャンプワイヤー |
バッテリーホルダー *1 |
|
|
|
バットカード *1 |
リフトロッドカード *1 |








3. 部品の知識
サーボ
サーボは位置駆動装置です。サーボを使って正確な位置制御や高トルク出力が可能です。通常、ロボット、リモコンカー、さらには航空機モデルで使われます。多くの仕様がありますが、すべてのサーボは3本の線を持っています:信号線(オレンジ)、正極(赤)、負極(茶色)。色はサーボのブランドによって異なります。

内部構造図:
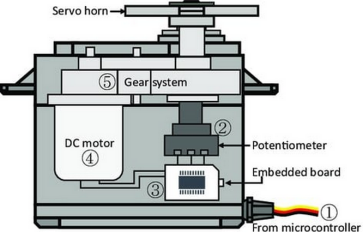
① 信号線:マイコンからの制御信号を受け取る;
② ポテンショメーター:出力軸の位置を測定し、サーボ全体のフィードバック部分に属する;
③ 内部コントローラー:組み込み基板が外部制御からの信号を処理し、モーターと位置フィードバック信号を駆動する。サーボ全体のコア;
④ DCモーター:速度、トルク、位置を出力するアクチュエーター;
⑤ 伝達機構/サーボ機構:モーターのストローク出力を一定の伝達比で最終出力角度に拡大する機構。
サーボの駆動
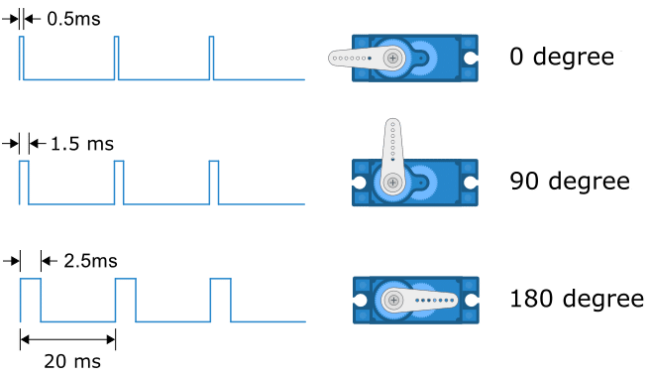
PWM信号をサーボの信号線に送って出力を制御します。PWMのデューティ比が出力軸の位置を直接決定します。周期は通常20ミリ秒で、50Hzの周波数でパルスを生成するように設定されます。
例えば(180°サーボ):
180°サーボに1.5ミリ秒(ms)のパルス幅を送ると、サーボの出力軸は中間位置(90度)に移動します;
パルス幅が0.5msなら、出力軸は0度に移動します;
パルス幅が2.5msなら、出力軸は180度に移動します;
パラメータ:
動作電圧:DC 3.3V~5V
動作温度:-10°C ~ +50°C
寸法:32.25mm x 12.25mm x 30.42mm
インターフェース:ピッチ2.54mmの3ピンインターフェース
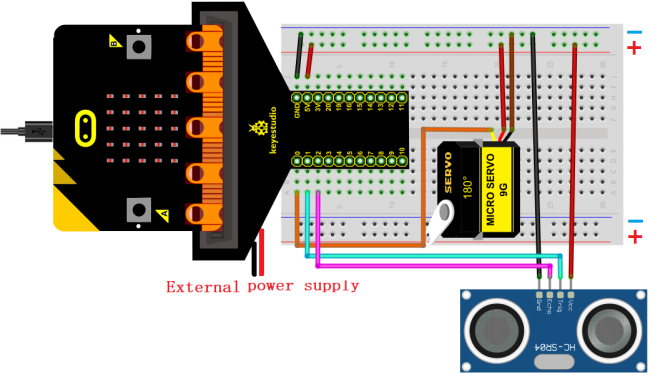
4. 配線図
超音波センサーとサーボを使用する場合は、必ず外部電源を接続し、DIPスイッチをONにしてください。

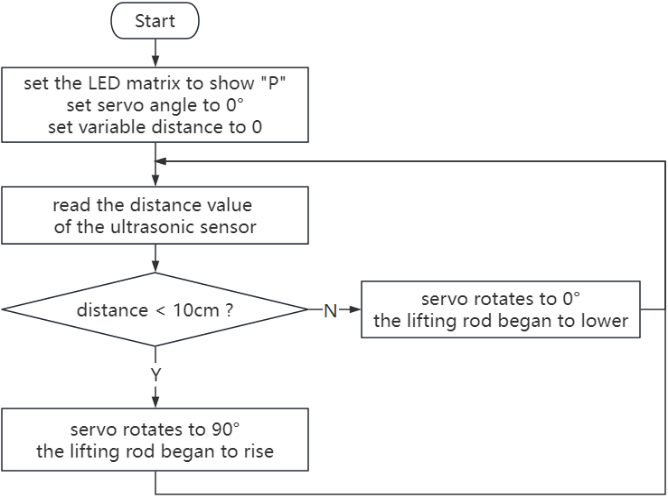
5. コードフロー
6. テストコード
コードファイルはフォルダ Project 04:Smart-Parking 内のファイル Project-04-Smart-Parking.py にあります。
完成コード: 条件10の閾値は実際の状況に応じて変更可能です。
'''
Function: smart parking
Compiling IDE: MU 1.2.0
Author: https://docs.keyestudio.com
'''
# import related libraries
from microbit import *
import ustruct
import machine
from time import sleep_us
distance = 0 # set variable distance initial value to 0
lastEchoDuration = 0 # set variable lastEchoDuration initial value to 0
val = Image("09990:""09090:""09990:""09000:""09000") # set iamge
display.show(val) # LED matrix shows image
pin0.write_analog(25.6) # set P0 pin analog to 25.6, servo angle to 0°
sleep(200)
while True:
pin0.set_analog_period(20) # set servo frequency
# Ultrasonic sensor sends and receives signals
pin1.write_digital(0)
sleep_us(2)
pin1.write_digital(1)
sleep_us(15)
pin1.write_digital(0)
# measure the time interval between "when rising edge detected from the pin2" and "until the pin becomes low again"
# unit is μs. Assign the interval to variable t.
t = machine.time_pulse_us(pin2, 1, 35000)
# a conditional statement, used to check whether the values of two variables t and lastechoduration satisfy specific conditions.
# If both conditions are met, the block of code under the condition statement is executed.
if (t <= 0 and lastEchoDuration >= 0):
t = lastEchoDuration # variable t = variable lastechoduration
else:
lastEchoDuration = t
distance = int(t * 0.017) # calculate distance
if distance < 10: # if distance < 10cm
pin0.write_analog(77) # servo rotate to 90°
sleep(2000)
else: # or
sleep(2000)
pin0.write_analog(25.6)
sleep(2000)
7. テスト結果
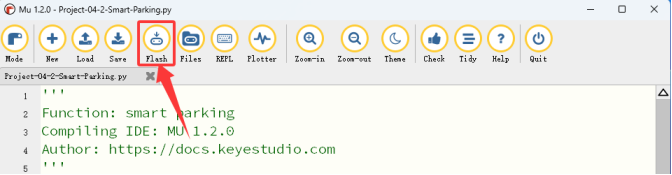
「Flash」をクリックしてコードをmicro:bitボードに書き込みます。
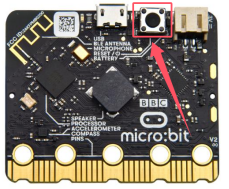
コードをボードにダウンロードした後、micro USBケーブルまたは外部電源で電源を入れ(DIPスイッチをONにする)、ボードのリセットボタンを押します。
超音波センサーが車両(または物)が近づいてくるのを検出すると、サーボがリフトロッドを上げます。センサーが離れていくのを検出すると、サーボはリフトロッドを下げます。
注意: 配線が正しいのに結果が見えない場合は、ボードの裏側のリセットボタンを押してください。