Project 5 Line Tracking Car
1.Description
In the previous section, we have introduced the principle and application of line tracking module and motor driving. After that, combine the tracking sensor and module to build a line following car.
So at first what does line tracking mean? It refers to follow the line trajectory. You might often see some robots always follow or track a black line.
2.How does it work?
It uses the tracking sensor to detect the black track on the pavement, and detection signal will feed back to the micro:bit main board. Then micro:bit main board will analyze and judge the collected signals to control and drive the motor in time, thus can adjust the car’s turning direction.
That is why the micro:bit car can automatically follow the black track, achieving the automatic line tracking function.
3.Programming Thinking
①At first judge the middle tracking sensor. If it detects a black line, no matter detect a black line on either side, the micro:bit car always goes forward.
②If the middle tracking sensor does not detect a black line, then judge the sensor on both sides.
If the left sensor detects a black line, but the right sensor doesn’t, the micro:bit car will turn left;
If the right sensor detects a black line, but the left sensor doesn’t, the micro:bit car will turn right;
If all three sensors do not detect a black line, the micro:bit car will stop.
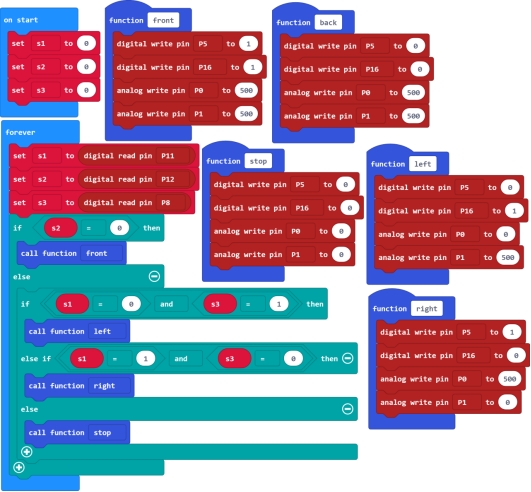
4.Test Code
5.Test Result
Send the test code to micro:bit main board, then insert the micro:bit main board into the car shield and connect a 18650 battery, turn the POWER switch ON. At this moment, the micro:bit mini robot car will follow a black line.
**Special Note:**When testing the car, do not test it under the sun. During the test, if go wrong, you can try to test it in a darker environment.