Project 7 Line Tracking Robot

1. Description
The previous projects are inclusive of the knowledge of multiple sensors and modules. Next, we will work on a little challenging task.
Based on the working principle of the line tracking sensor we could make a line tracking car.
Line tracking robot car:
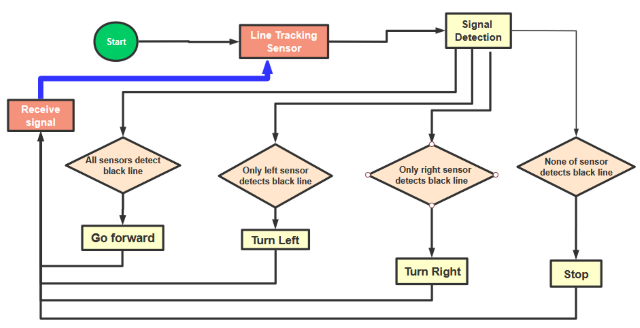
Flow Chart
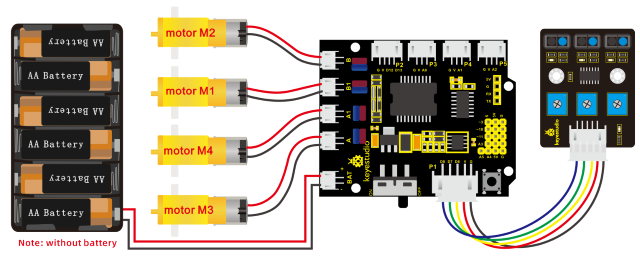
2. Connection Diagram
3. Test Code
/*
keyestudio 4wd BT Car V2.0
lesson 7
Line Tracking Robot
http://www.keyestudio.com
*/
#define ML_Ctrl 4 //define direction control pin of B motor
#define ML_PWM 5 //define PWM control pin of B motor
#define MR_Ctrl 2 //define direction control pin of A motor
#define MR_PWM 6 //define PWM control pin of A motor
const int sensor_l = 11;//define the pin of left line tracking sensor
const int sensor_c = 7;//define the pin of middle line tracking sensor
const int sensor_r = 8;//define the pin of right line tracking sensor
int l_val,c_val,r_val;//define these variables
void setup()
{
Serial.begin(9600);//start serial monitor and set baud rate to 9600
pinMode(ML_Ctrl, OUTPUT);//set direction control pin of B motor
pinMode(ML_PWM, OUTPUT);//set PWM control pin of B motor to OUTPUT
pinMode(MR_Ctrl, OUTPUT);//set direction control pin of A motor to OUTPUT
pinMode(MR_PWM, OUTPUT);//set PWM control pin of A motor to OUTPUT
pinMode(sensor_l,INPUT);//set the pins of left line tracking sensor to INPUT
pinMode(sensor_c,INPUT);//set the pins of middle line tracking sensor to INPUT
pinMode(sensor_r,INPUT);//set the pins of right line tracking sensor to INPUT
}
void loop()
{
tracking(); //run main program
}
void tracking()
{
l_val = digitalRead(sensor_l);//read the value of left line tracking sensor
c_val = digitalRead(sensor_c);//read the value of middle line tracking sensor
r_val = digitalRead(sensor_r);//read the value of right line tracking sensor
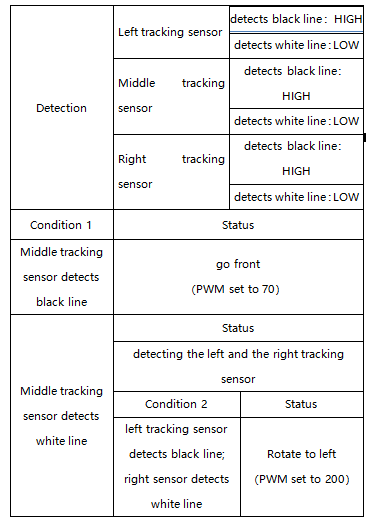
if(c_val == 1)//if the state of middle one is 1, which means detecting black line
{
front();//car goes forward
}
else
{
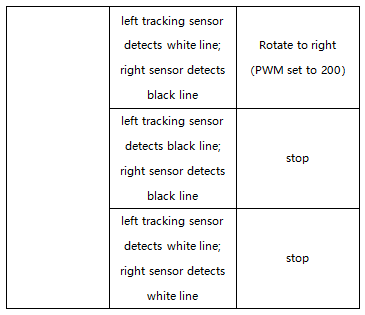
if((l_val == 1)&&(r_val == 0))//if only left line tracking sensor detects black trace
{
left();//car turns left
}
else if((l_val == 0)&&(r_val == 1))//if only right line tracking sensor detects black trace
{
right();//car turns right
}
else// if left and right line tracking sensors detect black trace or they don’t read
{
Stop();//car stops
}
}
}
void front()//define the status of going forward
{
digitalWrite(ML_Ctrl,HIGH);//set direction control pin of B motor to HIGH
analogWrite(ML_PWM,70);//set PWM control speed of B motor to 70
digitalWrite(MR_Ctrl,HIGH);//set direction control pin of A motor to HIGH
analogWrite(MR_PWM,70);//set PWM control speed of A motor to 70
}
void back()//define the state of going back
{
digitalWrite(ML_Ctrl,LOW);//set direction control pin of B motor to LOW
analogWrite(ML_PWM,200);//set PWM control speed of B motor to 200
digitalWrite(MR_Ctrl,LOW);//set direction control pin of A motor to LOW
analogWrite(MR_PWM,200);//set PWM control speed of A motor to 200
}
void left()//car turns left
{
digitalWrite(ML_Ctrl,LOW);//set direction control pin of B motor to LOW
analogWrite(ML_PWM,200);//set PWM control speed of B motor to 200
digitalWrite(MR_Ctrl,HIGH);//set direction control pin of A motor to HIGH level
analogWrite(MR_PWM,200);//set PWM control speed of A motor to 200
}
void right()//define the right-turning state
{
digitalWrite(ML_Ctrl,HIGH);//set direction control pin of B motor to HIGH level
analogWrite(ML_PWM,200);//set PWM control speed of B motor to 200
digitalWrite(MR_Ctrl,LOW);//set direction control pin of A motor to LOW
analogWrite(MR_PWM,200);//set PWM control speed of A motor to 200
}
void Stop()//define the state of stop
{
analogWrite(ML_PWM,0);//set PWM control speed of B motor to 0
analogWrite(MR_PWM,0);//set PWM control speed of A motor to 0
}
4. Test Result
Upload the code on the keyestudio V4.0 board successfully. Stack the expansion board on the keyestudio V4.0 board and wire it according to connection diagram. After power-on, the DIP switch will be dialed to the “ON” end, and the smart car can walk along the black line.