4.3.8 Motor Driving and Speed Control
4.3.8.1 Introduction
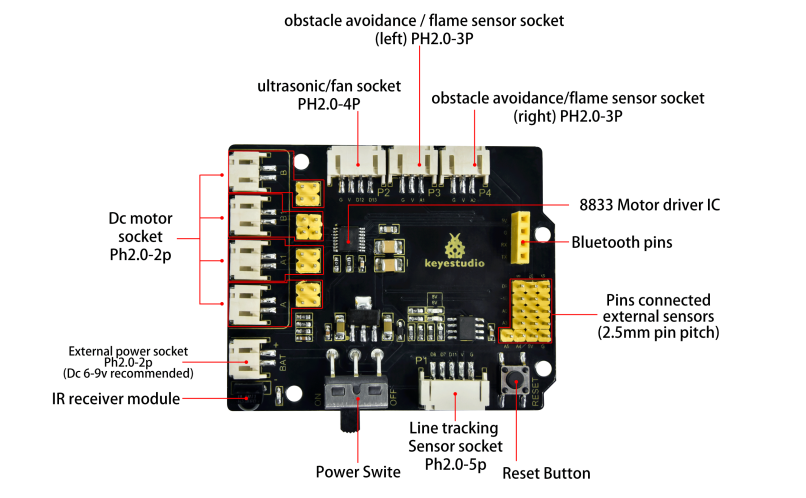
The 8833 motor driver expansion board uses PH2.0 terminals and an 8833 motor driver chip driven by the two-channel H bridge whose the largest current can be up to be 1.5A. It also integrates an IR receiver, ultrasonic sensor ports, analog ports, line tracking interfaces and pin headers for BT wifi and servo drivers
4.3.8.2 Component Knowledge
Keyestudio 8833 motor driver expansion board
Parameter:
Logic part input voltage: DC 5V
Input voltage of driving part: DC 6-9 V
Logic part operating current: <36mA
Operating current of driving part: <2A
Maximum power dissipation: 25W (T=75℃)
Control signal input level: high level 2.3V<Vin<5V, low level -0.3V<Vin<1.5V
Working temperature: -25+130℃
4.3.8.3 Drive Robot to Move
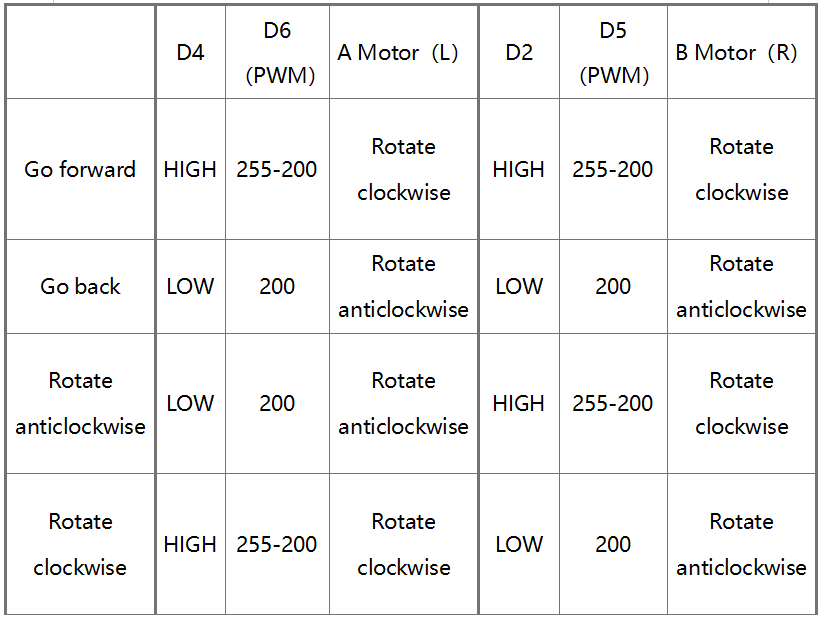
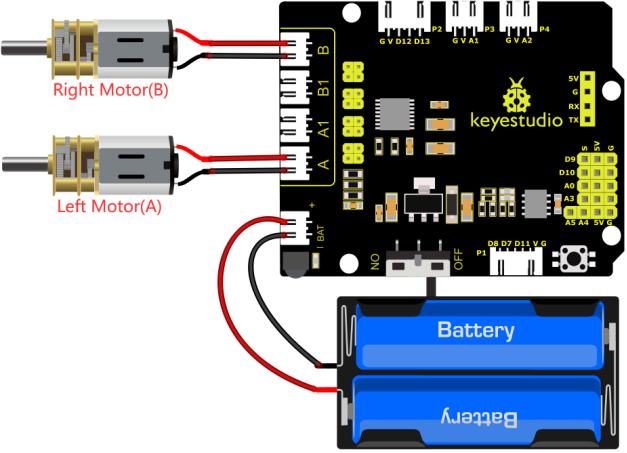
From the above diagram, it is known that the direction pin of B motor is D2; a speed pin is D5; D4 is the direction pin of A motor; and D6 is speed pin. PWM drives the robot car. The PWM value is in the range of 0-255. The larger the number, the faster the rotation of the motor.
4.3.8.4 Components
Keyestudio 4.0 development board *1 |
Keyestudio 8833 motor driver expansion board *1 |
Motor*1 |
|---|---|---|
|
|
|
18650 Battery Holder*1 |
2P Dupont Wire*2 |
USB cable*1 |
|
|
|




4.3.8.5 Wiring Diagram
4.3.8.6 Test Code
/*
keyestudio smart turtle robot
lesson 8.1
motor driver shield
http://www.keyestudio.com
*/
#define ML_Ctrl 4 //define the direction control pin of A motor
#define ML_PWM 6 //define the PWM control pin of A motor
#define MR_Ctrl 2 //define the direction control pin of B motor
#define MR_PWM 5 //define the PWM control pin of B motor
void setup()
{
pinMode(ML_Ctrl, OUTPUT);//set direction control pin of A motor to output
pinMode(ML_PWM, OUTPUT);//set PWM control pin of A motor to output
pinMode(MR_Ctrl, OUTPUT);//set direction control pin of B motor to output
pinMode(MR_PWM, OUTPUT);//set PWM control pin of B motor to output
}
void loop()
{
//front
digitalWrite(ML_Ctrl,HIGH);//set the direction control pin of A motor to HIGH
analogWrite(ML_PWM,55);//set the PWM control speed of A motor to 55
digitalWrite(MR_Ctrl,HIGH);//set the direction control pin of B motor to HIGH
analogWrite(MR_PWM,55);// set the PWM control speed of B motor to 55
delay(2000);//delay in 2000ms
//back
digitalWrite(ML_Ctrl,LOW);//set the direction control pin of A motor to LOW level
analogWrite(ML_PWM,200);// set the PWM control speed of A motor to 200
digitalWrite(MR_Ctrl,LOW);//set the direction control pin of B motor to LOW level
analogWrite(MR_PWM,200);//set the PWM control speed of B motor to 200
delay(2000);//delay in 2000ms
//left
digitalWrite(ML_Ctrl,LOW);//set the direction control pin of A motor to LOW level
analogWrite(ML_PWM,200);//set the PWM control speed of A motor to 200
digitalWrite(MR_Ctrl,HIGH);//set the direction control pin of B motor to HIGH level
analogWrite(MR_PWM,55);//set the PWM control speed of B motor to 200
delay(2000);//delay in 2000ms
//right
digitalWrite(ML_Ctrl,HIGH);//set the direction control pin of A motor to HIGH level
analogWrite(ML_PWM,55);//set the PWM control speed of A motor to 55
digitalWrite(MR_Ctrl,LOW);// set the direction control pin of B motor to LOW level
analogWrite(MR_PWM,200);//set the PWM control speed of B motor to 200
delay(2000);//delay in 2000ms
//stop
digitalWrite(ML_Ctrl, LOW);// set the direction control pin of A motor to LOW level
analogWrite(ML_PWM,0);//set the PWM control speed of A motor to 0
digitalWrite(MR_Ctrl, LOW);// set the direction control pin of B motor to LOW level
analogWrite(MR_PWM,0);//set the PWM control speed of B motor to 0
delay(2000);// delay in 2000ms
}
4.3.8.7 Test Result
Upload code, power on the external power and turn the DIP switch to O. The turtle car will go for ward for 2s, back for 2s, turn left for 2s and right for 2s and stop for 2s
4.3.8.8 Code Explanation
digitalWrite(ML_Ctrl,LOW): the rotation direction of motor is decided by the high/low level and and the pins that decide rotation direction are digital pins. analogWrite(ML_PWM,200): the speed of motor is regulated by PWM, and the pins that decide the speed of motor must be PWM pins.
4.3.8.9 Extension Practice
Adjust the speed that PWM controls the motor, hook up in the same way.
/*
keyestudio smart turtle robot
lesson 8.2
motor driver
http://www.keyestudio.com
*/
#define ML_Ctrl 4 //define the direction control pin of A motor
#define ML_PWM 6 //define the PWM control pin of A motor
#define MR_Ctrl 2 //define the direction control pin of B motor
#define MR_PWM 5 //define the PWM control pin of B motor
void setup()
{ pinMode(ML_Ctrl, OUTPUT);//set the direction control pin of A motor to OUTPUT
pinMode(ML_PWM, OUTPUT);//set the PWM control pin of A motor to OUTPUT
pinMode(MR_Ctrl, OUTPUT);//set the direction control pin of B motor to OUTPUT
pinMode(MR_PWM, OUTPUT);//set the PWM control pin of B motor to OUTPUT
}
void loop()
{
//front
digitalWrite(ML_Ctrl,HIGH);//set the direction control pin of A motor to HIGH
analogWrite(ML_PWM,155);//set the PWM control speed of A motor to 155
digitalWrite(MR_Ctrl,HIGH);//set the direction control pin of B motor to HIGH
analogWrite(MR_PWM,155);// set the PWM control speed of B motor to 155
delay(2000);//delay in 2000ms
//back
digitalWrite(ML_Ctrl,LOW);//set the direction control pin of A motor to LOW level
analogWrite(ML_PWM,100);// set the PWM control speed of A motor to 100
digitalWrite(MR_Ctrl,LOW);//set the direction control pin of B motor to LOW level
analogWrite(MR_PWM,100);//set the PWM control speed of B motor to 100
delay(2000);//delay in 2000ms
//left
digitalWrite(ML_Ctrl,LOW);//set the direction control pin of A motor to LOW level
analogWrite(ML_PWM,100);//set the PWM control speed of A motor to 100
digitalWrite(MR_Ctrl,HIGH);//set the direction control pin of B motor to HIGH level
analogWrite(MR_PWM,155);//set the PWM control speed of B motor to 155
delay(2000);//delay in 2000ms
//right
digitalWrite(ML_Ctrl,HIGH);//set the direction control pin of A motor to HIGH level
analogWrite(ML_PWM,155);//set the PWM control speed of A motor to 155
digitalWrite(MR_Ctrl,LOW);// set the direction control pin of B motor to LOW level
analogWrite(MR_PWM,100);//set the PWM control speed of B motor to 100
delay(2000);//delay in 2000ms
//stop
digitalWrite(ML_Ctrl, LOW);// set the direction control pin of A motor to LOW level
analogWrite(ML_PWM,0);//set the PWM control speed of A motor to 0
digitalWrite(MR_Ctrl, LOW);// set the direction control pin of B motor to LOW level
analogWrite(MR_PWM,0);//set the PWM control speed of B motor to 0
delay(2000);// delay in 2000ms
}
Upload code, power on the external power and turn the DIP switch to ON, do you find the motors rotate slower?
Note: low current will cause that the motor rotates slowly.