Projekt 1: LED Blink
1. Beschreibung

Für Anfänger und Enthusiasten ist LED Blink ein grundlegendes Programm. LED, die Abkürzung für Light Emitting Diodes, besteht aus chemischen Verbindungen wie Ga, As, P, N usw.
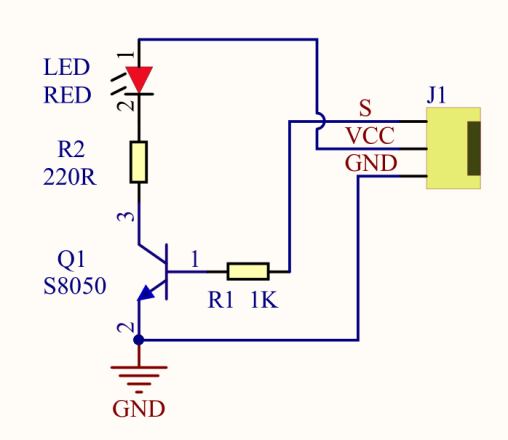
Die LED kann durch Ändern der Verzögerungszeit im Testcode in verschiedenen Farben blinken. Bei Steuerung und Anschluss an GND und VCC leuchtet die LED, wenn der S-Anschluss auf High-Pegel ist, andernfalls erlischt sie.
2. Spezifikation
Steuerinterface: digitaler Port
Betriebsspannung: DC 3,3-5V
Pin-Abstand: 2,54 mm
LED-Anzeigefarbe: rot
3. Komponenten
Entwicklungsboard *1 |
8833 Motor Driver *1 |
Rotes LED Modul *1 |
|---|---|---|
|
|
|
3P Dupont Kabel *1 |
USB-Kabel *1 |
|
|
|





4. Schaltplan
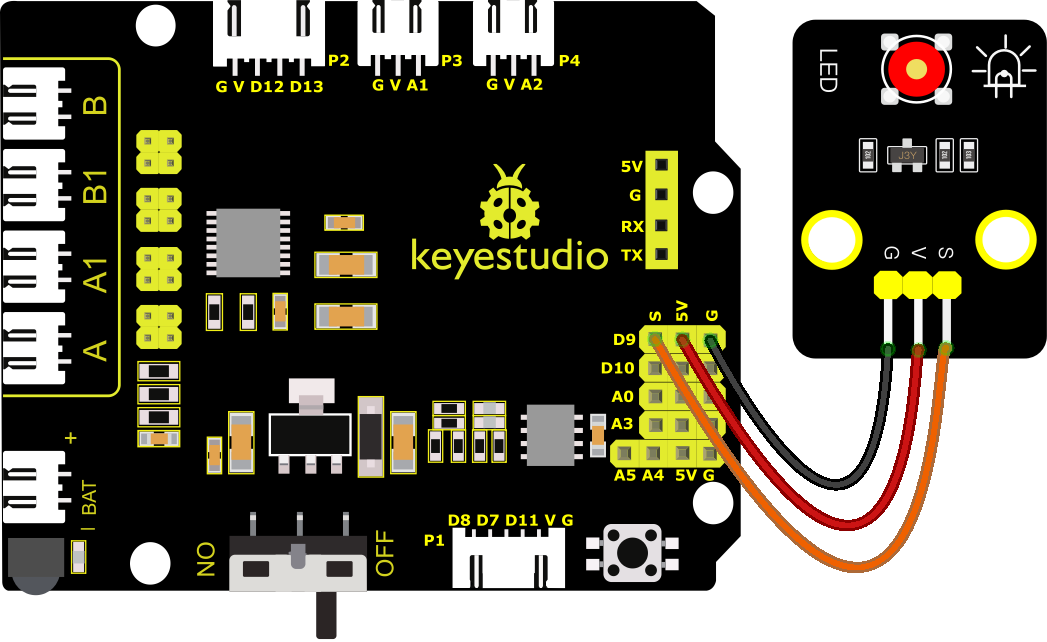
Wie aus der obigen Abbildung ersichtlich ist, ist das Keyestudio 8833 Motor Shield auf das Keyestudio 4.0 Entwicklungsboard aufgesteckt.
Die Pins G, V und S des LED-Moduls sind jeweils mit G, 5V und D9 des Erweiterungsboards verbunden.
5. Testcode
//****************************************************************************
/*
keyestudio 4wd BT Car
lesson 1.1
Blink
http://www.keyestudio.com
*/
void setup()
{
pinMode(9, OUTPUT);// initialisiert digitalen Pin 9 als Ausgang.
}
void loop() // die loop-Funktion läuft endlos immer wieder
{
digitalWrite(9, HIGH); // schaltet die LED ein (HIGH ist die Spannungsebene)
delay(1000); // wartet eine Sekunde
digitalWrite(9, LOW); // schaltet die LED aus, indem die Spannung auf LOW gesetzt wird
delay(1000); // wartet eine Sekunde
}
//****************************************************************************
6. Testergebnis
Nach erfolgreichem Hochladen des Codes auf das V4.0 Board, verbinden Sie die Kabel gemäß dem Schaltplan und verwenden Sie ein USB-Kabel, um den Computer mit Strom zu versorgen. Nach dem Einschalten sehen Sie, dass die an D9 angeschlossene LED an- und ausgeht.
7. Code-Erklärung
pinMode(9,OUTPUT) - Diese Funktion legt fest, ob der Pin als INPUT oder OUTPUT verwendet wird.
digitalWrite(9,HIGH) - Wenn der Pin als OUTPUT definiert ist, kann er auf HIGH (5V ausgeben) oder LOW (0V ausgeben) gesetzt werden.
8. Erweiterte Übung
Wir haben es geschafft, die LED blinken zu lassen. Als Nächstes beobachten wir, was passiert, wenn wir die Verzögerungszeit ändern.
//****************************************************************************
/*
keyestudio 4wd BT Car
lesson 1.2
delay
http://www.keyestudio.com
*/
void setup()
{
// initialisiert digitalen Pin 9 als Ausgang.
pinMode(9, OUTPUT);
}
// die loop-Funktion läuft endlos immer wieder
void loop()
{
digitalWrite(9, HIGH); // schaltet die LED ein (HIGH ist die Spannungsebene)
delay(100); // wartet 0,1 Sekunden
digitalWrite(9, LOW); // schaltet die LED aus, indem die Spannung auf LOW gesetzt wird
delay(100); // wartet 0,1 Sekunden
}
//*****************************************************************
Das Testergebnis zeigt, dass die LED schneller blinkt. Daher beeinflusst die Verzögerungszeit die Blinkfrequenz der LED.