Projekt 14 IR Fernbedienung Smart Car
1. Beschreibung
In diesem Projekt bauen wir ein IR-Fernbedienungs-Smart-Car und drücken die Taste auf der IR-Fernbedienung, um das Auto zu steuern.
2. Flussdiagramm
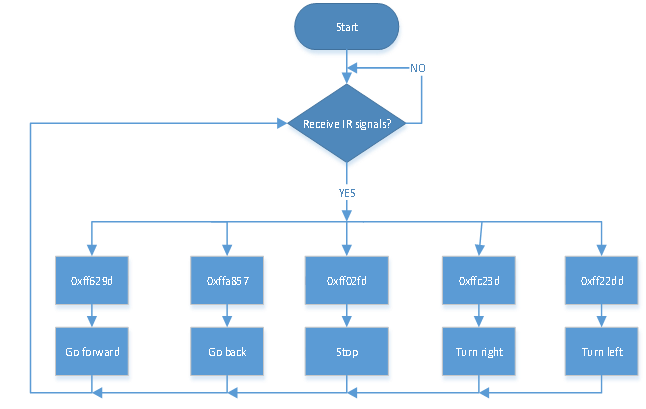
Die spezifische Logik des IR-Fernbedienungs-Smart-Cars ist unten dargestellt:
Anfangskonfiguration |
LED-Board zeigt Smiley |
|
|---|---|---|
Fernbedienung |
Tastencode |
Tastenzustand |
|
FF629D |
Vorwärts 8*8 LED-Board zeigt Vorwärtssymbol |
|
FFA857 |
Rückwärts 8*8 LED-Board zeigt Rückwärtssymbol |
|
FF22DD |
Nach links drehen 8*8 LED-Board zeigt Links-Symbol |
|
FFC23D |
Nach rechts drehen 8*8 LED-Board zeigt Rechts-Symbol |
|
FF02FD |
Stopp 8*8 LED-Board zeigt „STOP“ |





3. Schaltplan
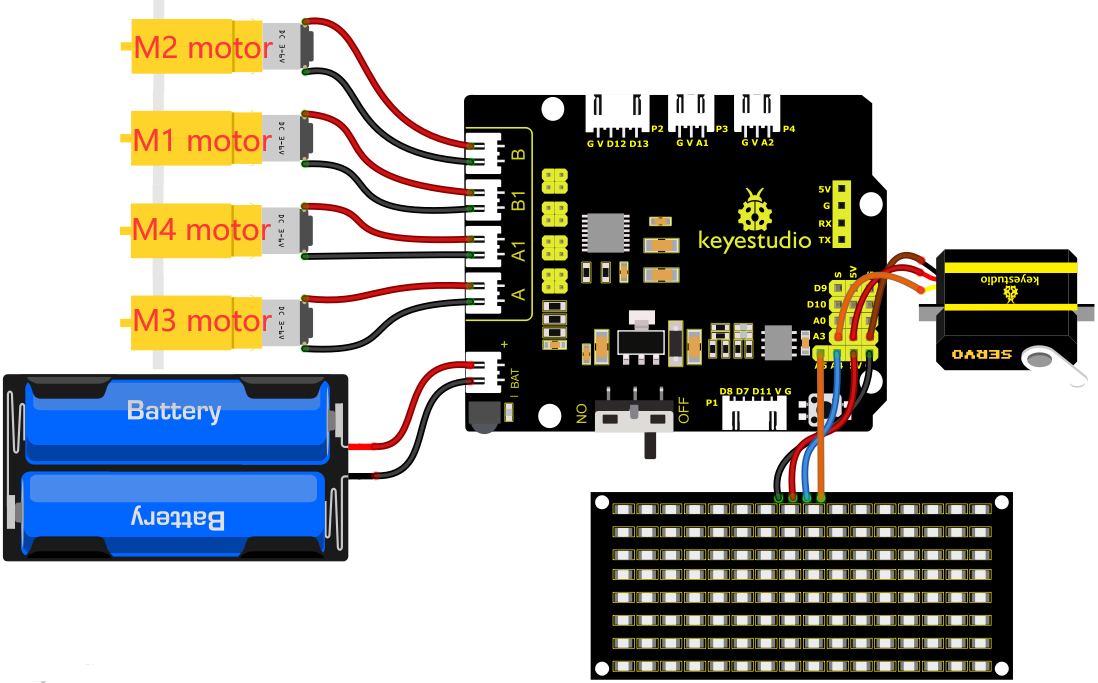
1). GND, VCC, SDA und SCL des 8*8 LED-Board-Moduls sind mit G (GND), V (VCC), A4 und A5 des Erweiterungsboards verbunden.
2). Da der IR-Empfänger im 8833 Motor Shield integriert ist, ist keine zusätzliche Verkabelung erforderlich. Die Pins des IR-Empfängers auf dem 8833 Board sind jeweils G (GND), V (VCC) und D3.
3). Der Servo ist mit G, V und A3 verbunden. Das braune Kabel ist mit Gnd (G) verbunden, das rote Kabel mit 5V (V) und das orange Kabel mit A3.
4). Die Stromversorgung ist mit dem BAT-Anschluss verbunden.
4. Testcode
//*******************************************************************************
/*
keyestudio 4wd BT Car
lesson 14
IR remote Control Car
http://www.keyestudio.com
*/
#define SCL_Pin A5 //Setze den Clock-Pin auf A5
#define SDA_Pin A4 //Setze den Daten-Pin auf A4
//Array, verwendet zum Speichern der Musterdaten, kann selbst berechnet oder mit dem Modultool erhalten werden
unsigned char start01[] = {0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80,0x80,0x40,0x20,0x10,0x08,0x04,0x02,0x01};
unsigned char front[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x12,0x09,0x12,0x24,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char back[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x48,0x90,0x48,0x24,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char left[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x44,0x28,0x10,0x44,0x28,0x10,0x44,0x28,0x10,0x00};
unsigned char right[] = {0x00,0x10,0x28,0x44,0x10,0x28,0x44,0x10,0x28,0x44,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char STOP01[] = {0x2E,0x2A,0x3A,0x00,0x02,0x3E,0x02,0x00,0x3E,0x22,0x3E,0x00,0x3E,0x0A,0x0E,0x00};
unsigned char clear[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
#include <Arduino.h>
#include <IRremote.h>//Funktionsbibliothek für IR-Fernbedienung
int RECV_PIN = 3;//Setze den Pin des IR-Empfängers auf D3
IRrecv irrecv(RECV_PIN);
long irr_val;
decode_results results;
int left_ctrl = 2;//Definiere die Richtungssteuerungs-Pins des Motors Gruppe B
int left_pwm = 5;//Definiere die PWM-Steuerungs-Pins des Motors Gruppe B
int right_ctrl = 4;//Definiere die Richtungssteuerungs-Pins des Motors Gruppe A
int right_pwm = 6;//Definiere die PWM-Steuerungs-Pins des Motors Gruppe A
#include <Servo.h>
Servo servo_A3;//Setze den Pin des Servos auf A3
unsigned char data_line = 0;
unsigned char delay_count = 0;
void setup() {
Serial.begin(9600);//
// Falls der Interrupt-Treiber beim Setup abstürzt, gibt dies dem Benutzer einen Hinweis,
// was gerade passiert.
Serial.println("Enabling IRin");
irrecv.enableIRIn(); // Starte den Empfänger
Serial.println("Enabled IRin");
pinMode(left_ctrl,OUTPUT);//Setze Richtungssteuerungs-Pins des Gruppe B Motors auf OUTPUT
pinMode(left_pwm,OUTPUT);//Setze PWM-Steuerungs-Pins des Gruppe B Motors auf OUTPUT
pinMode(right_ctrl,OUTPUT);//Setze Richtungssteuerungs-Pins des Gruppe A Motors auf OUTPUT
pinMode(right_pwm,OUTPUT);//Setze PWM-Steuerungs-Pins des Gruppe A Motors auf OUTPUT
servo_A3.attach(A3);
servo_A3.write(90);//Der Winkel des Servos ist 90 Grad
delay(300);
pinMode(SCL_Pin,OUTPUT);// Setze den Clock-Pin auf Ausgang
pinMode(SDA_Pin,OUTPUT);//Setze den Daten-Pin auf Ausgang
matrix_display(clear);
matrix_display(start01); //zeige das Start01 Ausdrucksmuster an
}
void loop()
{
if (irrecv.decode(&results))
{
irr_val = results.value;
Serial.println(irr_val, HEX);//Serielle Ausgabe der gelesenen IR-Fernbedienungssignale
switch(irr_val)
{
case 0xFF629D : car_front(); //Empfange 0xFF629D, das Auto fährt vorwärts
matrix_display(clear);
matrix_display(front);
break;
case 0xFFA857 : car_back(); //Empfange 0xFFA857, das Auto fährt rückwärts
matrix_display(clear);
matrix_display(back);
break;
case 0xFF22DD : car_left(); //Empfange 0xFF22DD, das Auto dreht nach links
matrix_display(clear);
matrix_display(left);
break;
case 0xFFC23D : car_right();//Empfange 0xFFC23D, das Auto dreht nach rechts
matrix_display(clear);
matrix_display(right);
break;
case 0xFF02FD : car_Stop();//Empfange 0xFF02FD, das Auto stoppt
matrix_display(clear);
matrix_display(STOP01);
break;
}
irrecv.resume(); // Empfange den nächsten Wert
}
}
void car_front()//definiert den Zustand des Vorwärtsfahrens
{
digitalWrite(left_ctrl,HIGH);
analogWrite(left_pwm,105);
digitalWrite(right_ctrl,HIGH);
analogWrite(right_pwm,105);
}
void car_back()//definiert den Zustand des Rückwärtsfahrens
{
digitalWrite(left_ctrl,LOW);
analogWrite(left_pwm,150);
digitalWrite(right_ctrl,LOW);
analogWrite(right_pwm,150);
}
void car_left()//setzt den Zustand des Linksabbiegens
{
digitalWrite(left_ctrl, LOW);
analogWrite(left_pwm, 100);
digitalWrite(right_ctrl, HIGH);
analogWrite(right_pwm, 155);
}
void car_right()//setzt den Zustand des Rechtsabbiegens
{
digitalWrite(left_ctrl, HIGH);
analogWrite(left_pwm, 155);
digitalWrite(right_ctrl, LOW);
analogWrite(right_pwm, 100);
}
void car_Stop()//definiert den Zustand des Anhaltens
{
digitalWrite(left_ctrl,LOW);
analogWrite(left_pwm,0);
digitalWrite(right_ctrl,LOW);
analogWrite(right_pwm,0);
}
//diese Funktion wird für die Punktmatrixanzeige verwendet
void matrix_display(unsigned char matrix_value[])
{
IIC_start(); //die Funktion, die die Startbedingung der Datenübertragung aufruft
IIC_send(0xc0); //Adresse auswählen
for (int i = 0; i < 16; i++) //die Musterdaten sind 16 Bytes
{
IIC_send(matrix_value[i]); //Übertrage die Daten des Musters
}
IIC_end(); //Beende die Musterdatenübertragung
IIC_start();
IIC_send(0x8A); //Anzeige-Steuerung, wähle 4/16 Pulsbreite
IIC_end();
}
//Bedingungen, unter denen die Datenübertragung beginnt
void IIC_start()
{
digitalWrite(SDA_Pin, HIGH);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW);
}
//Zeigt das Ende der Datenübertragung an
void IIC_end()
{
digitalWrite(SCL_Pin, LOW);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
}
//Daten übertragen
void IIC_send(unsigned char send_data)
{
for (byte mask = 0x01; mask != 0; mask <<= 1) //Jedes Byte hat 8 Bits und wird bitweise beginnend mit dem niedrigsten Bit geprüft
{
if (send_data & mask) { //Setzt die High- und Low-Pegel von SDA_Pin abhängig davon, ob jedes Bit des Bytes eine 1 oder 0 ist
digitalWrite(SDA_Pin, HIGH);
} else {
digitalWrite(SDA_Pin, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH); //Ziehe den Clock-Pin SCL_Pin auf High, um die Datenübertragung zu stoppen
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW); //Ziehe den Clock-Pin SCL_Pin auf Low, um das SIGNAL von SDA zu ändern
}
}
//*******************************************************************************
5. Testergebnis
Nachdem der Code erfolgreich auf das V4.0 Board hochgeladen wurde, verbinden Sie die Verkabelung gemäß dem Schaltplan, schalten Sie die externe Stromversorgung ein und stellen Sie dann den DIP-Schalter auf ON. Danach können wir die IR-Fernbedienung verwenden, um das Auto zu steuern, und die 8X16 LED-Anzeige zeigt das entsprechende Statusmuster an.