Projekt 15 Bluetooth-gesteuertes Smart Car

1. Beschreibung
Wir haben die Grundkenntnisse über Bluetooth gelernt. In dieser Lektion werden wir ein Bluetooth-gesteuertes Smart Car bauen. In diesem Projekt betrachten wir das Mobiltelefon als Sender (Host) und das Smart Car, das mit dem BT24 Bluetooth-Modul (Slave) verbunden ist, als Empfänger. Die Steuerung des Smart Cars erfolgt über die mobile APP via Bluetooth.
2. APP-Steuertasten
Steuerzeichen |
Steuerzeichen |
|
|---|---|---|
|
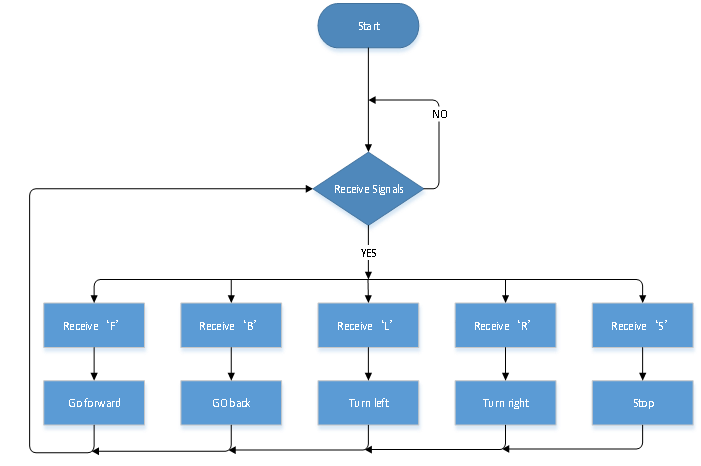
Drücken: F |
Taste drücken, das Auto fährt vorwärts; |
|
Drücken: L |
Taste drücken, das Auto dreht nach links; |
|
Drücken: R |
Taste drücken, das Auto dreht nach rechts; |
|
Drücken: B |
Taste drücken, das Auto fährt rückwärts; |
|
Drücken: „a“ |
Klicken zum Beschleunigen (maximal: 255) |
|
Drücken: „d“ |
Klicken zum Verlangsamen (minimal: 0) |
|
Klicken zum Starten der Schwerkraft- |
|
|
Klicken zum Senden von „X“, |
Linienverfolgungsfunktion starten; |
|
Klicken zum Senden von „Y“, |
Ultraschall-Hindernisvermeidung starten; |
|
Klicken zum Senden von „U“, |
Ultraschall-Folgefunktion starten; |
|
Klicken zum Senden von „G“, |
Einschränkungsfunktion starten; |











3. Flussdiagramm
4. Schaltplan
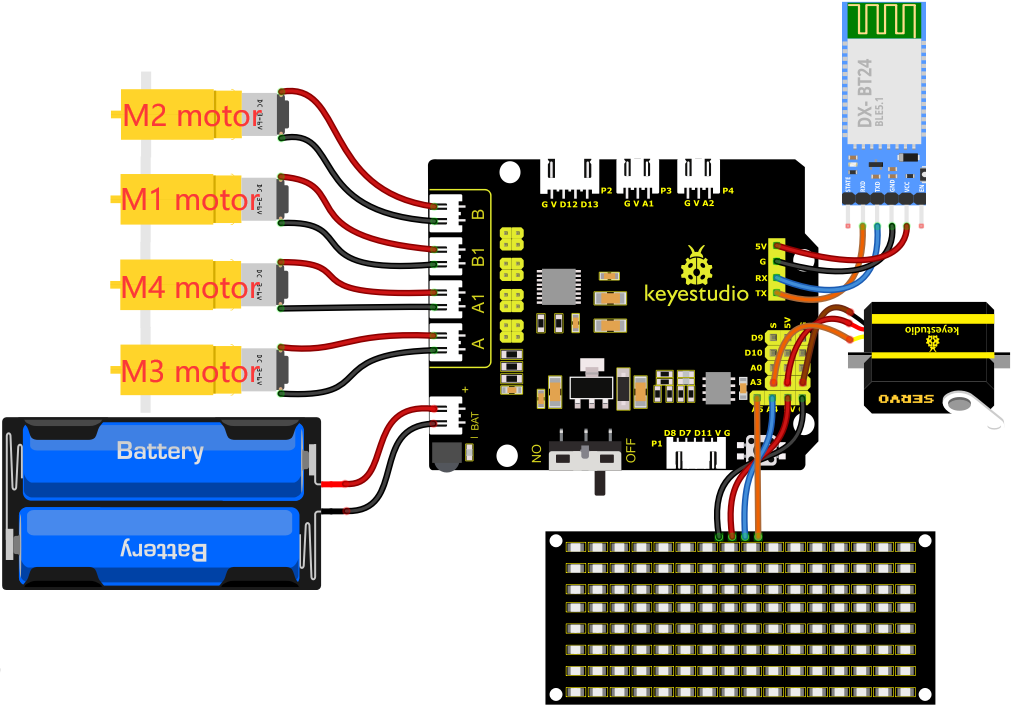
1). GND, VCC, SDA und SCL der 8*8 LED-Platine sind mit G (GND), V (VCC), A4 und A5 des Erweiterungsboards verbunden.
2). RXD, TXD, GND und VCC des Bluetooth-Moduls sind jeweils mit TX, RX, G und 5V auf dem 8833 Motor Shield verbunden, während die STATE- und BRK-Pins des Bluetooth-Moduls nicht angeschlossen werden müssen.
3). Das Servo ist mit G, V und A3 verbunden. Der braune Draht ist mit Gnd (G), der rote Draht mit 5V (V) und der orange Draht mit A3 verbunden.
4). Die Stromversorgung ist mit dem BAT-Anschluss verbunden.
5. Testcode
Hinweis: Vor dem Hochladen des Testcodes müssen Sie das Bluetooth-Modul entfernen, da sonst der Code nicht hochgeladen werden kann. Verbinden Sie das Bluetooth-Modul erst nach erfolgreichem Hochladen des Codes wieder.
//*******************************************************************************
/*
keyestudio 4wd BT Auto
Lektion 15
Bluetooth Steuerung Auto
http://www.keyestudio.com
*/
#define SCL_Pin A5 //Setze den Clock-Pin auf A5
#define SDA_Pin A4 //Setze den Daten-Pin auf A4
//Array, verwendet zum Speichern der Musterdaten, kann selbst berechnet oder mit dem Modul-Tool erhalten werden
unsigned char start01[] = {0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80,0x80,0x40,0x20,0x10,0x08,0x04,0x02,0x01};
unsigned char front[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x12,0x09,0x12,0x24,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char back[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x48,0x90,0x48,0x24,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char left[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x44,0x28,0x10,0x44,0x28,0x10,0x44,0x28,0x10,0x00};
unsigned char right[] = {0x00,0x10,0x28,0x44,0x10,0x28,0x44,0x10,0x28,0x44,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char STOP01[] = {0x2E,0x2A,0x3A,0x00,0x02,0x3E,0x02,0x00,0x3E,0x22,0x3E,0x00,0x3E,0x0A,0x0E,0x00};
unsigned char clear[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
int left_ctrl = 2;//definiere die Richtungssteuerungs-Pins des Motors Gruppe B
int left_pwm = 5;//definiere die PWM-Steuerungs-Pins des Motors Gruppe B
int right_ctrl = 4;//definiere die Richtungssteuerungs-Pins des Motors Gruppe A
int right_pwm = 6;//definiere die PWM-Steuerungs-Pins des Motors Gruppe A
const int servopin = A3;//setze den Pin des Servos auf A3
char BLE_val;
void setup() {
Serial.begin(9600);//
pinMode(left_ctrl,OUTPUT);//setze die Richtungssteuerungs-Pins des Motors Gruppe B auf OUTPUT
pinMode(left_pwm,OUTPUT);//setze die PWM-Steuerungs-Pins des Motors Gruppe B auf OUTPUT
pinMode(right_ctrl,OUTPUT);//setze die Richtungssteuerungs-Pins des Motors Gruppe A auf OUTPUT
pinMode(right_pwm,OUTPUT);//setze die PWM-Steuerungs-Pins des Motors Gruppe A auf OUTPUT
servopulse(servopin,90);//der Winkel des Servos ist 90 Grad
delay(300);
pinMode(SCL_Pin,OUTPUT);// Setze den Clock-Pin auf Ausgang
pinMode(SDA_Pin,OUTPUT);//Setze den Daten-Pin auf Ausgang
matrix_display(clear);
matrix_display(start01); //zeige das Muster start01 an
}
void loop() {
if(Serial.available()>0) {
BLE_val = Serial.read();
Serial.println(BLE_val);
}
switch(BLE_val)
{
case 'F' : car_front(); //Empfange 'F', das Auto fährt vorwärts
matrix_display(clear);
matrix_display(front);
break;
case 'B' : car_back(); //Empfange 'B', das Auto fährt rückwärts
matrix_display(clear);
matrix_display(back);
break;
case 'L' : car_left(); //Empfange 'L', das Auto dreht nach links
matrix_display(clear);
matrix_display(left);
break;
case 'R' : car_right();//Empfange 'R', das Auto dreht nach rechts
matrix_display(clear);
matrix_display(right);
break;
case 'S' : car_Stop();//Empfange 'S', das Auto stoppt
matrix_display(clear);
matrix_display(STOP01);
break;
}
}
void car_front()//definiere den Zustand Vorwärtsfahren
{
digitalWrite(left_ctrl,HIGH);
analogWrite(left_pwm,155);
digitalWrite(right_ctrl,HIGH);
analogWrite(right_pwm,155);
}
void car_back()//definiere den Zustand Rückwärtsfahren
{
digitalWrite(left_ctrl,LOW);
analogWrite(left_pwm,100);
digitalWrite(right_ctrl,LOW);
analogWrite(right_pwm,100);
}
void car_left()//setze den Zustand Linksdrehung
{
digitalWrite(left_ctrl, LOW);
analogWrite(left_pwm, 100);
digitalWrite(right_ctrl, HIGH);
analogWrite(right_pwm, 155);
}
void car_right()//setze den Zustand Rechtsdrehung
{
digitalWrite(left_ctrl, HIGH);
analogWrite(left_pwm, 155);
digitalWrite(right_ctrl, LOW);
analogWrite(right_pwm, 100);
}
void car_Stop()//definiere den Zustand Stop
{
digitalWrite(left_ctrl,LOW);
analogWrite(left_pwm,0);
digitalWrite(right_ctrl,LOW);
analogWrite(right_pwm,0);
}
void servopulse(int servopin,int myangle)//Lenkgetriebe Laufwinkel
{
for(int i=0; i<30; i++)
{
int pulsewidth = (myangle*11)+500;
digitalWrite(servopin,HIGH);
delayMicroseconds(pulsewidth);
digitalWrite(servopin,LOW);
delay(20-pulsewidth/1000);
}
}
//diese Funktion wird für die Punktmatrixanzeige verwendet
void matrix_display(unsigned char matrix_value[])
{
IIC_start(); //die Funktion, die die Datenübertragungs-Startbedingung aufruft
IIC_send(0xc0); //Adresse auswählen
for (int i = 0; i < 16; i++) //die Musterdaten sind 16 Bytes
{
IIC_send(matrix_value[i]); //Übertrage die Daten des Musters
}
IIC_end(); //Ende der Musterdatenübertragung
IIC_start();
IIC_send(0x8A); //Anzeige-Steuerung, wähle 4/16 Pulsbreite
IIC_end();
}
//Bedingungen, unter denen die Datenübertragung beginnt
void IIC_start()
{
digitalWrite(SDA_Pin, HIGH);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW);
}
//Zeigt das Ende der Datenübertragung an
void IIC_end()
{
digitalWrite(SCL_Pin, LOW);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
}
//Daten übertragen
void IIC_send(unsigned char send_data)
{
for (byte mask = 0x01; mask != 0; mask <<= 1) //Jedes Byte hat 8 Bits und wird bitweise beginnend mit dem niedrigsten Bit geprüft
{
if (send_data & mask) { //Setzt die High- und Low-Pegel von SDA_Pin abhängig davon, ob jedes Bit des Bytes eine 1 oder 0 ist
digitalWrite(SDA_Pin, HIGH);
} else {
digitalWrite(SDA_Pin, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH); //Ziehe den Clock-Pin SCL_Pin auf High, um die Datenübertragung zu stoppen
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW); //Ziehe den Clock-Pin SCL_Pin auf Low, um das SIGNAL von SDA zu ändern
}
}
//*******************************************************************************
6. Testergebnis
Nach erfolgreichem Hochladen des Codes auf das V4.0 Board verbinden Sie die Verkabelung gemäß dem Schaltplan, schalten die externe Stromversorgung ein und stellen den DIP-Schalter auf ON.
Setzen Sie das BT-Modul ein und öffnen Sie Ihr Handy, um die Bluetooth-Verbindung herzustellen und das Smart Car zu steuern. Das Auto wird vorwärts, rückwärts fahren, nach links und rechts abbiegen und anhalten. Außerdem zeigt die 8*8 LED-Anzeige die entsprechenden Muster an.