Project 1: LED Blink
1.説明

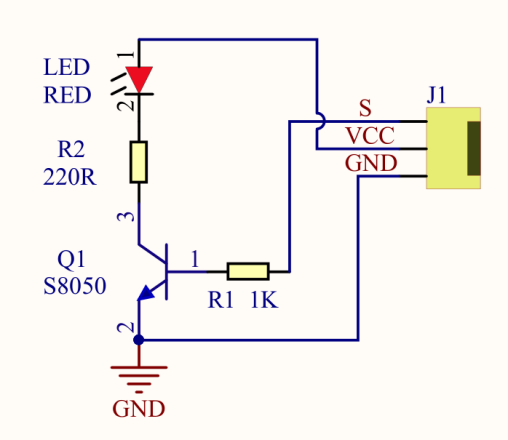
初心者や愛好家向けに、LED Blinkは基本的なプログラムです。LEDはlight emitting diodes(発光ダイオード)の略で、Ga、As、P、Nなどの化学化合物で構成されています。
テストコードの遅延時間を変えることで、LEDはさまざまな色で点滅できます。制御時には、GNDとVCCに電源を入れ、S端子が高レベルの場合はLEDが点灯し、そうでなければ消灯します。
2.仕様
制御インターフェース:デジタルポート
動作電圧:DC 3.3-5V
ピン間隔:2.54mm
LED表示色:赤
3.コンポーネント
Development Board *1 |
8833 Motor Driver *1 |
Red LED Module*1 |
|---|---|---|
|
|
|
3P Dupont Wire*1 |
USB Cable*1 |
|
|
|





4.配線図
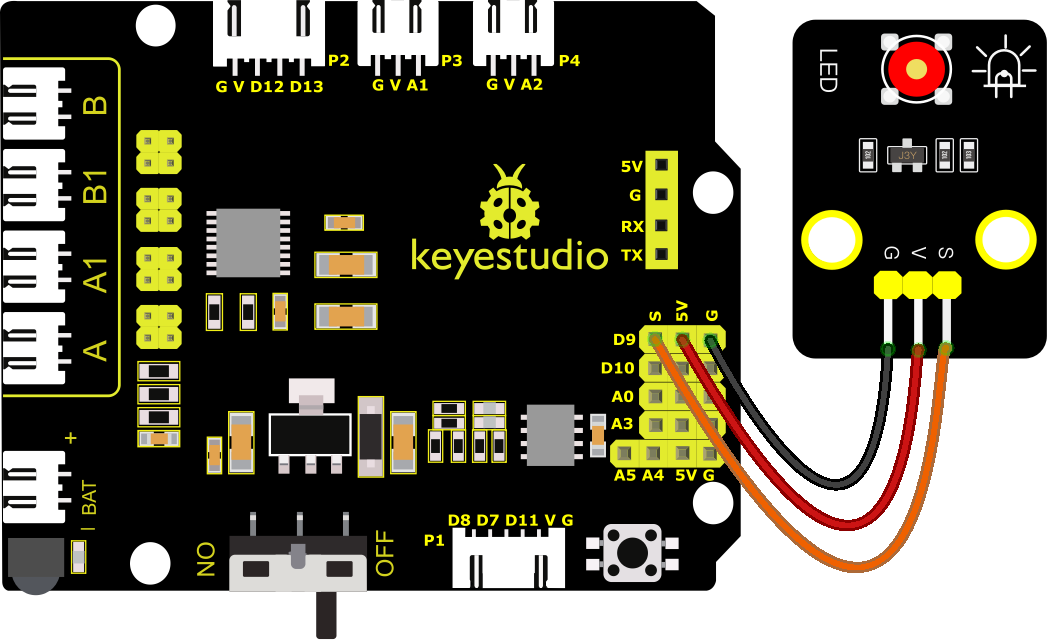
上図からわかるように、Keyestudio 8833 motor ShieldはKeyestudio 4.0開発ボードに重ねられています。
LEDモジュールのピンG、V、Sはそれぞれ拡張ボードのG、5V、D9に接続されています。
5.テストコード
//****************************************************************************
/*
keyestudio 4wd BT Car
lesson 1.1
Blink
http://www.keyestudio.com
*/
void setup()
{
pinMode(9, OUTPUT);// デジタルピン9を出力として初期化
}
void loop() // このループ関数は永遠に繰り返し実行される
{
digitalWrite(9, HIGH); // LEDを点灯(HIGHは電圧レベル)
delay(1000); // 1秒待つ
digitalWrite(9, LOW); // 電圧をLOWにしてLEDを消灯
delay(1000); // 1秒待つ
}
//****************************************************************************
6.テスト結果
コードをV4.0ボードに正常にアップロードした後、配線図に従って配線し、USBケーブルでコンピュータと接続してボードに電源を供給します。電源を入れると、D9に接続されたLEDが点灯と消灯を繰り返すのが見えます。
7.コード説明
pinMode(9,OUTPUT) - この関数はピンをINPUTかOUTPUTかを指定します
digitalWrite(9,HIGH) - ピンがOUTPUTの場合、HIGH(5V出力)またはLOW(0V出力)に設定できます
8.拡張練習
LEDの点滅に成功しました。次に、遅延時間を変更するとLEDにどのような変化が起きるか観察してみましょう。
//****************************************************************************
/*
keyestudio 4wd BT Car
lesson 1.2
delay
http://www.keyestudio.com
*/
void setup()
{
// デジタルピン9を出力として初期化
pinMode(9, OUTPUT);
}
// このループ関数は永遠に繰り返し実行される
void loop()
{
digitalWrite(9, HIGH); // LEDを点灯(HIGHは電圧レベル)
delay(100); // 0.1秒待つ
digitalWrite(9, LOW); // 電圧をLOWにしてLEDを消灯
delay(100); // 0.1秒待つ
}
//*****************************************************************
テスト結果はLEDの点滅が速くなることを示しています。したがって、遅延時間はLEDの点滅周波数に影響を与えます。