Project 13 超音波障害物回避スマートカー

1.説明
このプロジェクトでは、超音波を使った障害物回避スマートカーを作成します。超音波センサーで障害物までの距離を検出し、その情報を使ってサーボを回転させ、車を動かします。同時に、8X16 LEDボードに対応する状態パターンを表示します。
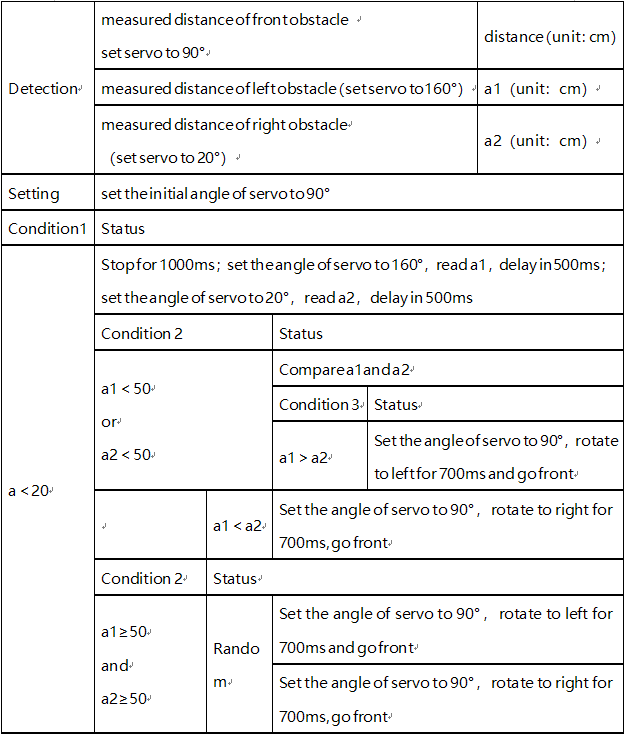
2.フローチャート
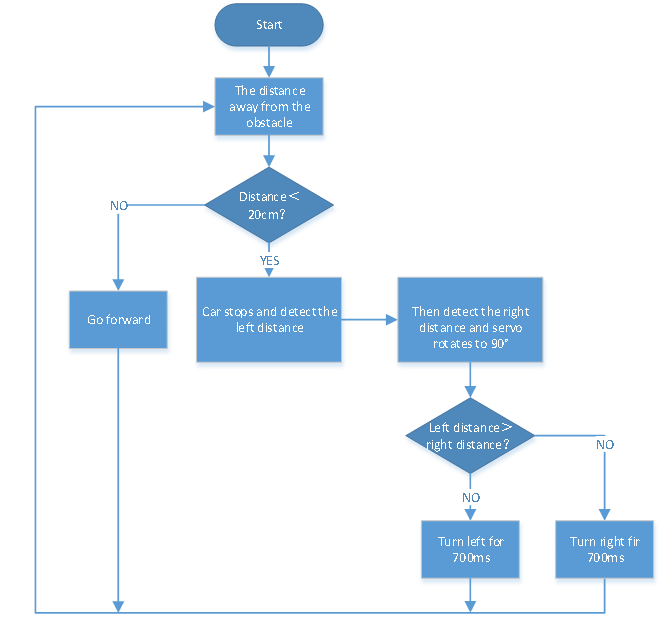
超音波障害物回避スマートカーの具体的なロジックは以下の通りです:

3.配線図
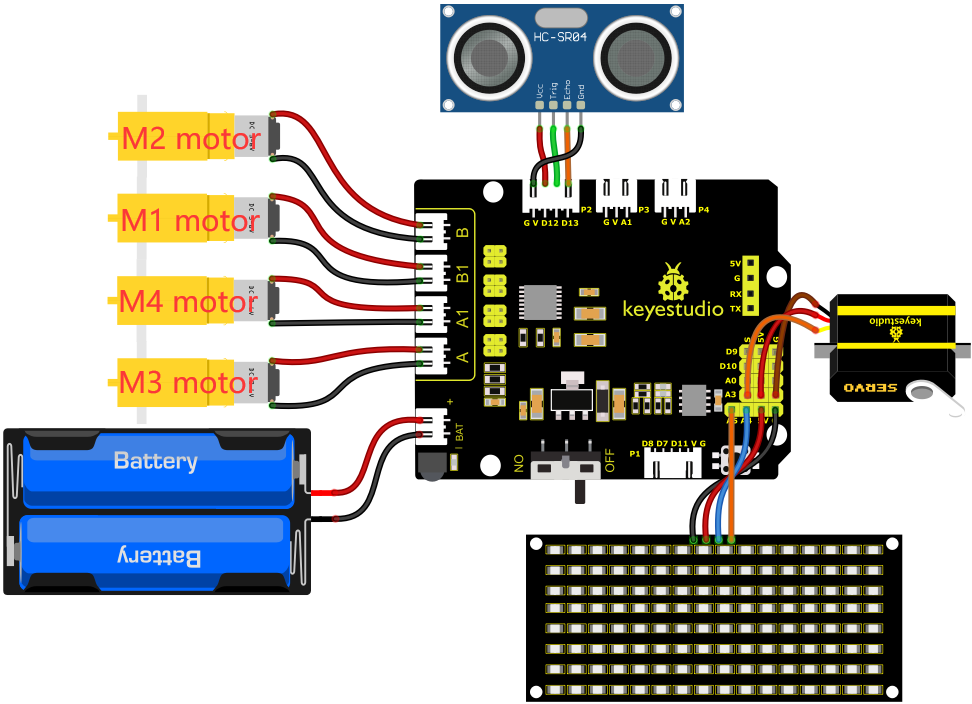
1). 8*8 LEDボードモジュールのGND、VCC、SDA、SCLは拡張ボードのG(GND)、V(VCC)、A4、A5に接続します。
2). 超音波センサーのVCC、Trig、Echo、GNDはそれぞれ5V(V)、D12(S)、D13(S)、GND(G)に接続します。
3). サーボはG、V、A3に接続します。茶色の線はGND(G)、赤色の線は5V(V)、オレンジ色の線はA3に接続します。
4). 電源はBATポートに接続します。
4.テストコード
//*******************************************************************************
/*
keyestudio 4wd BT Car
lesson 13
Avoiding Car
http://www.keyestudio.com
*/
#define SCL_Pin A5 //クロックピンをA5に設定
#define SDA_Pin A4 //データピンをA4に設定
//パターンのデータを格納する配列。自分で計算するかモジュールツールから取得可能
unsigned char front[] = {0x00,0x00,0x00,0x00,0x00,0x24,0x12,0x09,0x12,0x24,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char left[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x44,0x28,0x10,0x44,0x28,0x10,0x44,0x28,0x10,0x00};
unsigned char right[] = {0x00,0x10,0x28,0x44,0x10,0x28,0x44,0x10,0x28,0x44,0x00,0x00,0x00,0x00,0x00,0x00};
unsigned char STOP01[] = {0x2E,0x2A,0x3A,0x00,0x02,0x3E,0x02,0x00,0x3E,0x22,0x3E,0x00,0x3E,0x0A,0x0E,0x00};
unsigned char clear[] = {0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00};
int left_ctrl = 2;//グループBモーターの方向制御ピンを定義
int left_pwm = 5;//グループBモーターのPWM制御ピンを定義
int right_ctrl = 4;//グループAモーターの方向制御ピンを定義
int right_pwm = 6;//グループAモーターのPWM制御ピンを定義
#include "SR04.h"//超音波センサーのライブラリを定義
#define TRIG_PIN 12//超音波センサーの信号出力をD12に設定
#define ECHO_PIN 13//超音波センサーの信号入力をD13に設定
SR04 sr04 = SR04(ECHO_PIN,TRIG_PIN);
long distance,a1,a2;//3つの距離を定義
const int servopin = A3;//サーボのピンをA3に設定
void setup() {
pinMode(left_ctrl,OUTPUT);//グループBモーターの方向制御ピンを出力に設定
pinMode(left_pwm,OUTPUT);//グループBモーターのPWM制御ピンを出力に設定
pinMode(right_ctrl,OUTPUT);//グループAモーターの方向制御ピンを出力に設定
pinMode(right_pwm,OUTPUT);//グループAモーターのPWM制御ピンを出力に設定
pinMode(TRIG_PIN, OUTPUT); //Trigピンを出力に設定
pinMode(ECHO_PIN, INPUT); //Echoピンを入力に設定
servopulse(servopin,90);//サーボの角度を90度に設定
delay(300);
pinMode(SCL_Pin,OUTPUT);//クロックピンを出力に設定
pinMode(SDA_Pin,OUTPUT);//データピンを出力に設定
matrix_display(clear);
}
void loop()
{
avoid();//メインプログラムを実行
}
void avoid()
{
distance=sr04.Distance(); //超音波センサーで検出した値を取得
if((distance < 20)&&(distance != 0))//距離が0より大きく20未満の場合
{
car_Stop();//停止
matrix_display(clear);
matrix_display(STOP01);//停止パターンを表示
delay(1000);
servopulse(servopin,160);//サーボを160°に回転
delay(500);
a1=sr04.Distance();//距離を測定
delay(100);
servopulse(servopin,20);//20度に回転
delay(500);
a2=sr04.Distance();//距離を測定
delay(100);
servopulse(servopin,90); //90度の位置に戻す
delay(500);
if(a1 > a2)//距離を比較し、左の距離が右の距離より大きい場合
{
car_left();//左に曲がる
matrix_display(clear);
matrix_display(left); //左折パターンを表示
servopulse(servopin,90);//サーボを90度に回転
delay(700); //左に700ms回転
matrix_display(clear);
matrix_display(front); //前方パターンを表示
}
else//右の距離が左より大きい場合
{
car_right();//右に曲がる
matrix_display(clear);
matrix_display(right); //右折パターンを表示
servopulse(servopin,90);//サーボを90度に回転
delay(700);
matrix_display(clear);
matrix_display(front); //前方パターンを表示
}
}
else//それ以外の場合
{
car_front();//前進
matrix_display(clear);
matrix_display(front); //前方パターンを表示
}
}
void car_front()//車が前進する
{
digitalWrite(left_ctrl,HIGH);
analogWrite(left_pwm,155);
digitalWrite(right_ctrl,HIGH);
analogWrite(right_pwm,155);
}
void car_back()//後退する
{
digitalWrite(left_ctrl,LOW);
analogWrite(left_pwm,100);
digitalWrite(right_ctrl,LOW);
analogWrite(right_pwm,100);
}
void car_left()//車が左に曲がる
{
digitalWrite(left_ctrl, LOW);
analogWrite(left_pwm, 100);
digitalWrite(right_ctrl, HIGH);
analogWrite(right_pwm, 155);
}
void car_right()//車が右に曲がる
{
digitalWrite(left_ctrl, HIGH);
analogWrite(left_pwm, 155);
digitalWrite(right_ctrl, LOW);
analogWrite(right_pwm, 100);
}
void car_Stop()//停止
{
digitalWrite(left_ctrl,LOW);
analogWrite(left_pwm,0);
digitalWrite(right_ctrl,LOW);
analogWrite(right_pwm,0);
}
void servopulse(int servopin,int myangle)//サーボの動作角度
{
for(int i=0; i<20; i++)
{
int pulsewidth = (myangle*11)+500;
digitalWrite(servopin,HIGH);
delayMicroseconds(pulsewidth);
digitalWrite(servopin,LOW);
delay(20-pulsewidth/1000);
}
}
//この関数はドットマトリックス表示用
void matrix_display(unsigned char matrix_value[])
{
IIC_start(); //データ転送開始条件を呼び出す関数
IIC_send(0xc0); //アドレスを選択
```cpp
for (int i = 0; i < 16; i++) //パターンデータは16バイトです
{
IIC_send(matrix_value[i]); //パターンのデータを送信します
}
IIC_end(); //パターンデータ送信終了
IIC_start();
IIC_send(0x8A); //表示制御、4/16パルス幅を選択
IIC_end();
}
//データ送信開始の条件
void IIC_start()
{
digitalWrite(SDA_Pin, HIGH);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW);
}
//データ送信終了を示す
void IIC_end()
{
digitalWrite(SCL_Pin, LOW);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
}
//データ送信
void IIC_send(unsigned char send_data)
{
for (byte mask = 0x01; mask != 0; mask <<= 1) //各バイトは8ビットで、最下位からビットごとにチェックします
{
if (send_data & mask) { //バイトの各ビットが1か0かに応じてSDA_Pinの高低レベルを設定します
digitalWrite(SDA_Pin, HIGH);
} else {
digitalWrite(SDA_Pin, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH); //クロックピンSCL_PinをHIGHにしてデータ送信を停止します
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW); //クロックピンSCL_PinをLOWにしてSDAの信号を変化させます
}
}
//*******************************************************************************
5.テスト結果
コードをV4.0ボードに正常にアップロードした後、配線図に従って配線を接続し、外部電源をオンにしてからDIPスイッチをONにします。
スマートカーは前進し、自動的に障害物を回避します。前方に道がない場合、サーボが超音波センサーを駆動して左、中、右の距離をスキャンし、空いている側に車が旋回します。同時に、8X16 LEDボードには対応する状態パターンが表示されます。