Project 3: ライントラッキングセンサー

1.説明
トラッキングセンサーは実際には赤外線センサーです。ここで使用されているコンポーネントはTCRT5000赤外線チューブです。その動作原理は、赤外線の反射率の違いを色で検出し、反射信号の強さを電流信号に変換することです。
検出の過程では、黒はHIGHレベルでアクティブ、白はLOWレベルでアクティブとなります。検出高さは0〜3cmです。
Keyestudioの3チャンネルライントラッキングモジュールは、3セットのTCRT5000赤外線チューブを基板上に統合しており、配線と制御がより便利です。
センサー上の調整可能なポテンショメーターを回すことで、センサーの検出感度を調整できます。
2.仕様
動作電圧:3.3-5V(DC)
インターフェース:5PIN
出力信号:デジタル信号
検出高さ:0〜3cm
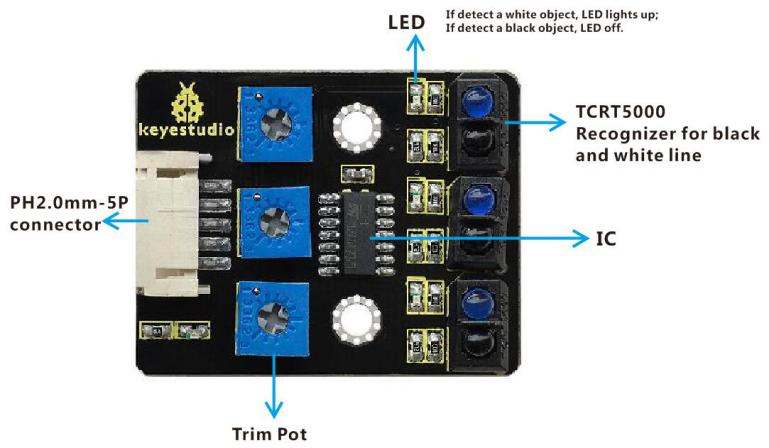
注意:テスト前にセンサー上のポテンショメーターを回して検出感度を調整してください。LEDがONとOFFの境界にあるときが最適な感度です。
3.コンポーネント
開発ボード *1 |
8833 モータードライバー *1 |
赤色LEDモジュール*1 |
ライントラッキングセンサー*1 |
|---|---|---|---|
|
|
|
|
5P デュポンワイヤー*1 |
USBケーブル*1 |
3P デュポンワイヤー*1 |
|
|
|
|







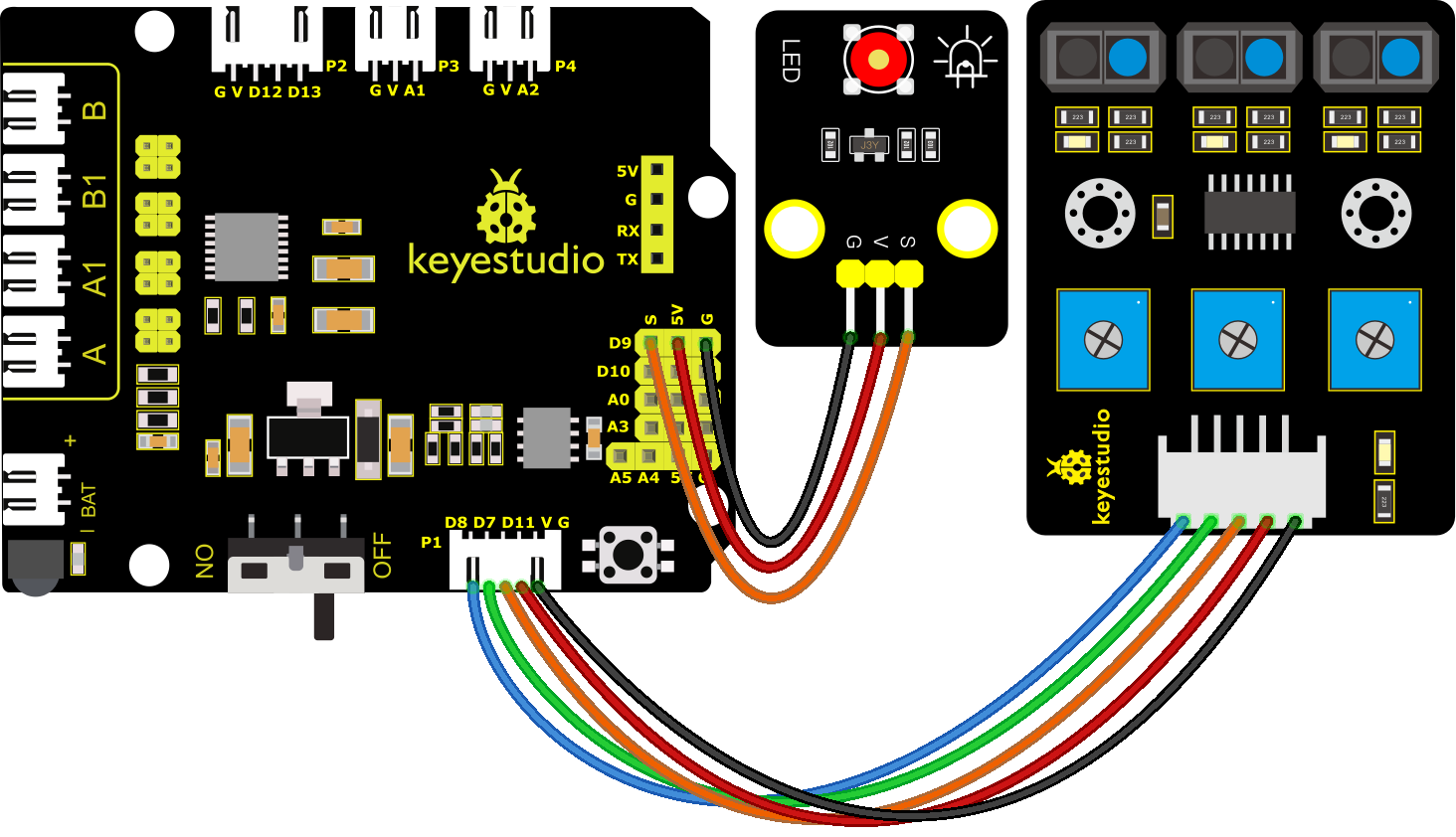
4.配線図
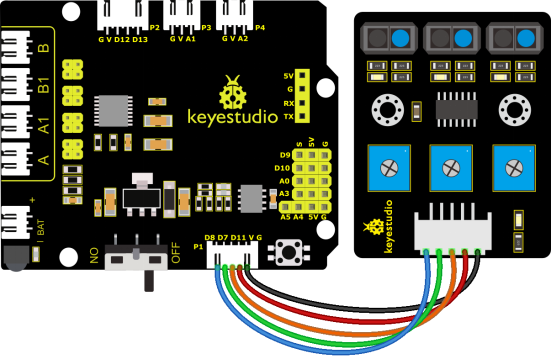
ライントラッキングセンサーのG、V、S1、S2、S3は、それぞれセンサー拡張ボードのG(GND)、V(VCC)、D11、D7、D8に接続します。
5.テストコード
//****************************************************************************
/*
keyestudio 4wd BT Car
lesson 3.1
Line Track sensor
http://www.keyestudio.com
*/
int L_pin = 11; // 左側ライントラッキングセンサーのピン
int M_pin = 7; // 中央ライントラッキングセンサーのピン
int R_pin = 8; // 右側ライントラッキングセンサーのピン
int val_L,val_R,val_M; // 3つのセンサーの値を格納する変数を定義
void setup()
{
Serial.begin(9600); // シリアル通信を9600ボーで初期化
pinMode(L_pin,INPUT); // L_pinを入力モードに設定
pinMode(M_pin,INPUT); // M_pinを入力モードに設定
pinMode(R_pin,INPUT); // R_pinを入力モードに設定
}
void loop()
{
val_L = digitalRead(L_pin); // L_pinの状態を読み取る
val_R = digitalRead(R_pin); // R_pinの状態を読み取る
val_M = digitalRead(M_pin); // M_pinの状態を読み取る
Serial.print("left:");
Serial.print(val_L);
Serial.print(" middle:");
Serial.print(val_M);
Serial.print(" right:");
Serial.println(val_R);
delay(500); // 安定のため読み取り間隔を遅延
}
//****************************************************************************
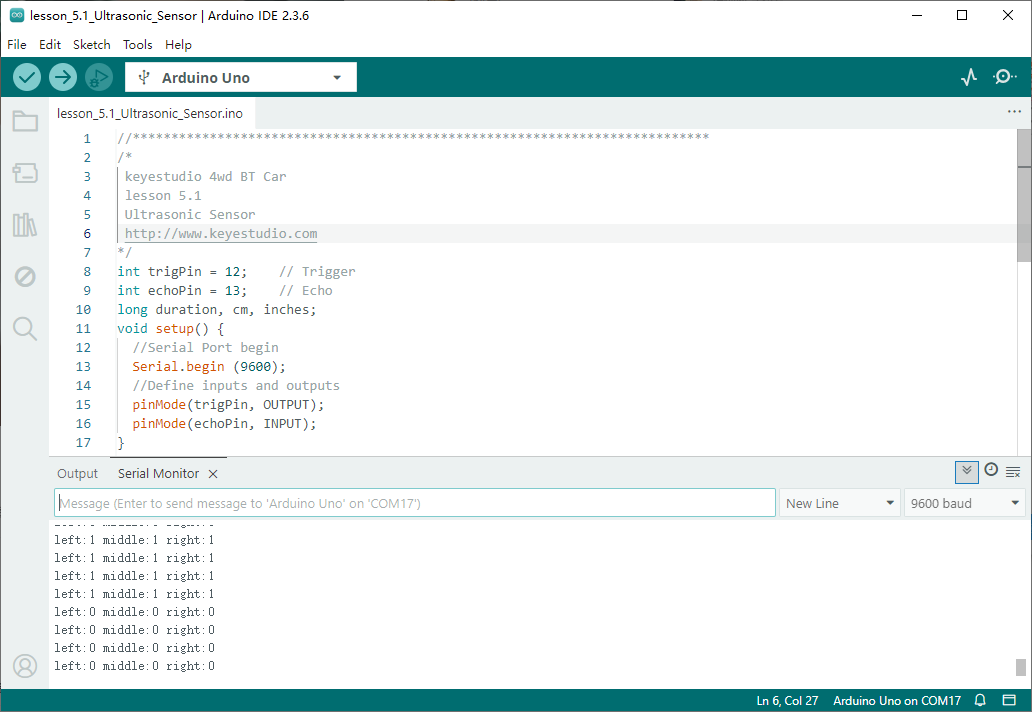
6.テスト結果
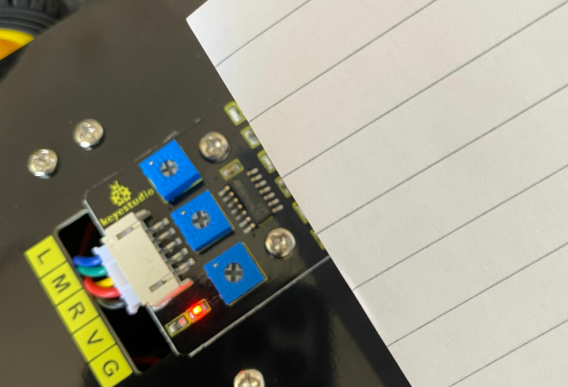
コードをV4.0ボードに正常にアップロードした後、配線図に従って配線し、USBケーブルでコンピューターと接続してボードに電源を供給します。
電源を入れたらシリアルモニターを開くと、3つのライントラッキングセンサーの状態が表示されます。信号が受信されていない場合は値が1になります。センサーを白い紙で覆うと値は0になります。
7.コード説明
Serial.begin(9600) - シリアルポートを初期化し、ボーレートを9600に設定
pinMode - ピンを入力または出力モードに定義
digitalRead - ピンの状態を読み取る(通常はHIGHまたはLOWレベル)
8.拡張練習
動作原理を理解した後、LEDをD9に接続して、センサーでLEDを制御することができます。
/*
keyestudio 4wd BT Car
lesson 3.2
Line Track Sensor LED
http://www.keyestudio.com
*/
int L_pin = 11; // 左側ライン追跡センサーのピン
int M_pin = 7; // 中央ライン追跡センサーのピン
int R_pin = 8; // 右側ライン追跡センサーのピン
int val_L,val_R,val_M;// 3つのセンサーの変数を定義
void setup()
{
Serial.begin(9600); // 9600ビット毎秒でシリアル通信を初期化
pinMode(L_pin,INPUT); // L_pinを入力に設定
pinMode(M_pin,INPUT); // M_pinを入力に設定
pinMode(R_pin,INPUT); // R_pinを入力に設定
pinMode(9, OUTPUT);
}
void loop()
{
val_L = digitalRead(L_pin);// L_pinの読み取り
val_R = digitalRead(R_pin);// R_pinの読み取り
val_M = digitalRead(M_pin);// M_pinの読み取り
Serial.print("left:");
Serial.print(val_L);
Serial.print(" middle:");
Serial.print(val_M);
Serial.print(" right:");
Serial.println(val_R);
delay(500);// 安定のため読み取り間に遅延
if ((val_L == LOW) || (val_M == LOW) || (val_R == LOW))// 左ライン追跡センサーが信号を検出した場合
{
Serial.println("HIGH");
digitalWrite(9, HIGH);// LEDが点灯
}
else// 左ライン追跡センサーが信号を検出しなかった場合
{
Serial.println("LOW");
digitalWrite(9, LOW);// LEDが消灯
}
}
//****************************************************************************
コードをV4.0ボードに正常にアップロードした後、配線図に従って配線を接続し、USBケーブルでコンピューターと接続してボードに電源を供給します。
電源を入れた後、センサーの近くに紙を置くと、ライン追跡センサーを覆ったときにLEDが点灯するのが確認できます。