Project 4 Driving and Speed Control of Motor
1.Overview
There are many ways to drive the motor. Our robot uses the most commonly used L298P solution. L298P is an excellent high-power motor driver IC produced by STMicroelectronics. It can directly drive DC motors, two-phase and four-phase stepping motors. The driving current up to 2A, and output terminal of motor adopts eight high-speed Schottky diodes as protection. We have designed the motor driver shield based on the L298P circuit. The stackable design can make it be plugged directly into the Arduino, reducing the technical difficulty of using and driving the motor.
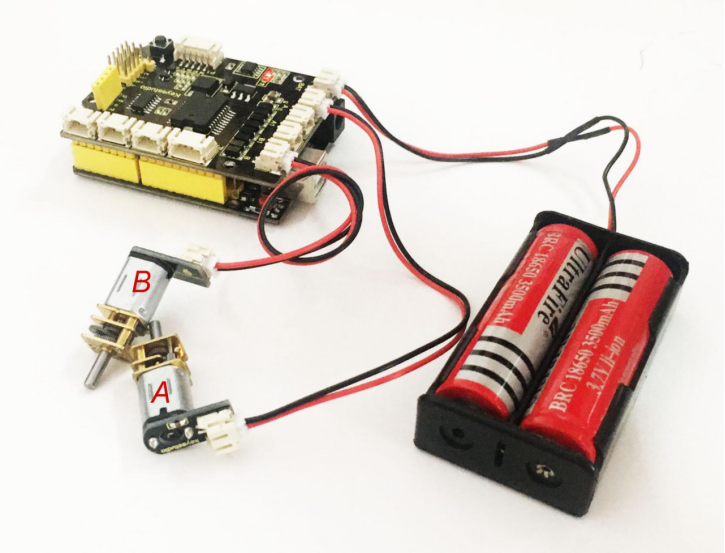
When stack the driver shield onto UNO R3 board, after the BAT is powered on, press the POWER button lightly. The external power will be supplied to both the driver shield and UNO R3 board at the same time. In order to facilitate wiring, the driver shield comes with an anti-reverse interface. When connecting the motor, power supply and sensor modules, you just need to plug in directly.
The Bluetooth interface on the driver shield is fully compatible with keyestudio HC-06 Bluetooth module. When connecting, you just need to plug HC-06 Bluetooth module into the corresponding interface. At the same time, thedrive shield solders 2.54mm pin headers tolead outsome unused digital ports and analog ports, so that you can continue to add other sensors for experiments extension.
2.Specifications
Logic part input voltage: 5V
Driving part input voltage: DC 7-12V
Logic part working current: <36mA
Driving part working current: <2A
Maximum power dissipation: 25W (T=75℃)
Control signal input level: High level: 2.3V<Vin<5V Low level: -0.3V<Vin<1.5V
Working temperature: -25℃~+130℃
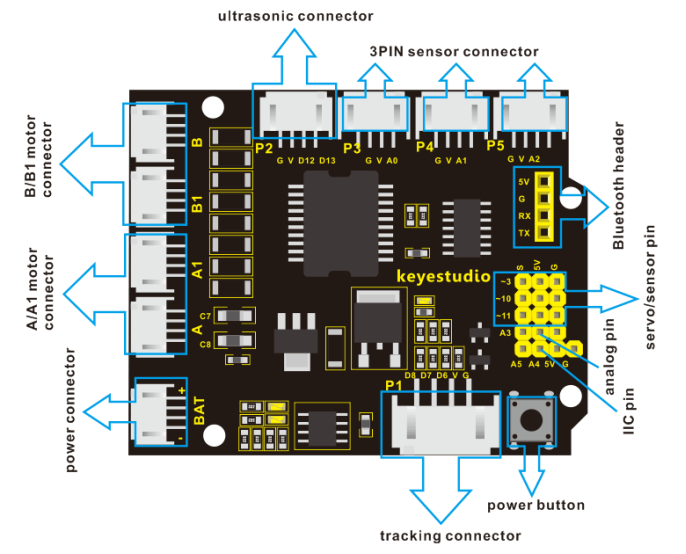
3.Pinout Instructions
As the diagram shown below, you can get the detailed information of connectors on the motor drive shield.
4.Driving DC Motor
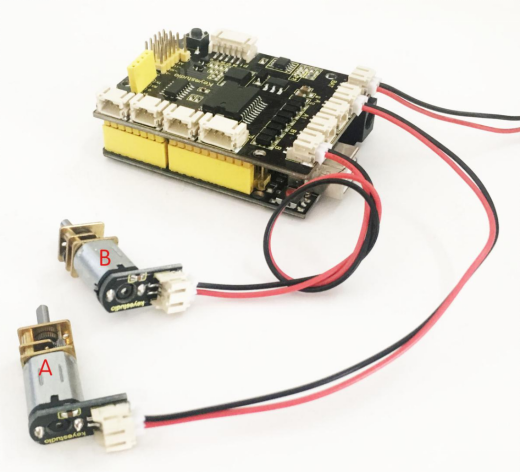
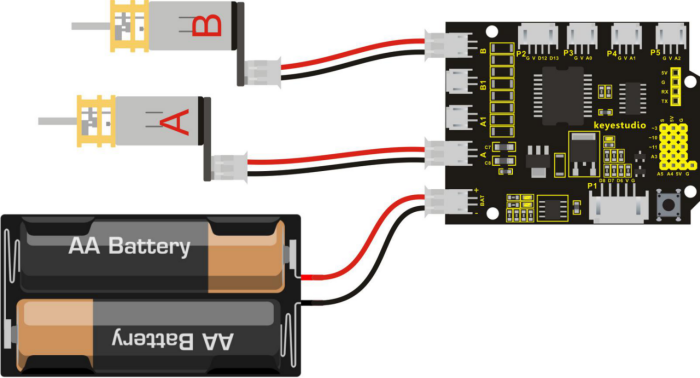
In the previous section, we have shown you the basic principle and parameters of L298P motor drive module. You can get the details of all interfaces on the board. So in the following, we will formally introduce how to drive the motor? First, you should connect well two motors to the shield, i.e. motor A and motor B shown as below.
Well, next let’s create the sketch.
The code logic of the smart car is nothing more than 5 kinds of movement modes, namely go forward, go backward, turn left, turn right and stop. So think about it. How could it implement those functions? Simply, for example, both the left and the right motor of the smart car turn in the forward direction, so that the smart car is able to go forward. If both the left and the right motors turn in reverse, the smart car will go backward. Besides, if the motor on the left side of car turns forward but the right side one turns reverse, it means that the smart car will turn right. If the motor on the right side of car turns forward but the left side one turns reverse, it means that the smart car will turn left.
You may be a little bit confused that how to control the forward or reverse turning of the motor?Actually, you can achieve that by controlling the microcontroller pin of motor direction to active at HIGH or LOW level. It is much more easier to understand the motor turning, however, it would be a little bit complicated to work out the speed control of motor.
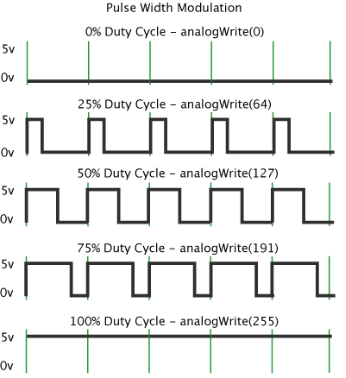
As for the speed control of motor, it involves the PWM mode. So what is PWM? Actually PWM is the short for Pulse Width Modulation. PWM is a technique for getting analog results with digital means. Digital control is used to create a square wave (a signal switched between on and off) to control the analog output. The output voltage of Arduino Digital port only has LOW and HIGH level, corresponding to the output voltage of 0 Volts and 5 Volts.
In the graphic below, the green lines represent a regular time period. This duration or period is the inverse of the PWM frequency. In other words, with Arduino’s PWM frequency at about 500Hz, the green lines would measure 2 milliseconds each. A call to analogWrite() is on a scale of 0-255, such that analogWrite(255) requests a 100% duty cycle (always on), and analogWrite(127) is a 50% duty cycle (on half the time) for example.
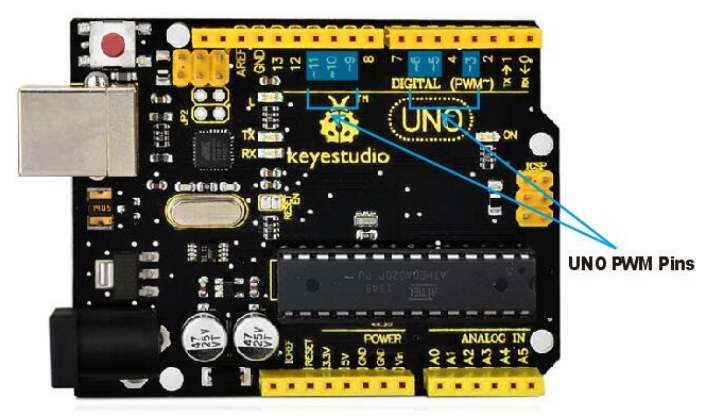
For example, as for the UNO board below, we have marked the PWM pins that can be used for analog output. You can see the PWM pins on UNO board are D3, D5, D6, D9, D10, and D11.
The function called by the PWM is: analogWrite(pin, value).
Note that the value is between 0 (always off) and 255 (always on). The speed of the motor is controlled actually by this value. The bigger the value is, the faster the speed is. Rather, the smaller the value is, the slower the speed it is until it stops.
In the following figure, look at the language logic of motor states: go forward, backward, turn left, turn right and stop. M1 and M2 represent the directional control of the 2-way motor, that is, forward and reverse rotation. E1 and E2 represent the speed control of motor. We control the speed at 150.
E1 |
M1 |
E2 |
M2 |
|||
|---|---|---|---|---|---|---|
Go forward |
150 |
HIGH |
Motor 1 forward |
150 |
HIGH |
Motor 2 forward |
Go backward |
150 |
LOW |
Motor 1 backward |
150 |
LOW |
Motor 2 backward |
Turn left |
150 |
HIGH |
Motor 1 forward |
150 |
LOW |
Motor 2 backward |
Turn right |
150 |
LOW |
Motor 1 backward |
150 |
HIGH |
Motor 2 forward |
Stop |
0 |
LOW |
Motor 1 stops |
0 |
LOW |
Motor 2 stops |
5.Example Code 6 as below
Okay, next we will start to write the example code. The part of Single line comment (//) is the explanation of the code. Based on that, you can understand it better.
int E1 = 9; // set the speed pin of motor A as D9
int E2 = 5; // set the speed pin of motor B as D5
int M1 = 2; // set the direction pin of motor A as D2
int M2 = 4; // set the direction pin of motor B as D4
void setup(void)
{
pinMode(M1,OUTPUT); // set M1 as OUTPUT mode
pinMode(M2,OUTPUT); // set M2 as OUTPUT mode
pinMode(E1,OUTPUT); // set E1 as OUTPUT mode
pinMode(E2,OUTPUT); // set E2 as OUTPUT mode
}
void advance(void) // set the forward motion
{
digitalWrite(M1,HIGH); // motor A turns forward, the wheel will go forward.
digitalWrite(M2,HIGH); // motor B turns forward, the wheel will go forward.
analogWrite(E1,150); // speed of motor A(can be adjusted according to the actual speed of motor. Turn up the value to accelerate, lower the value to decelerate.)
analogWrite(E2,150); // speed of motor B(can be adjusted according to the actual speed of motor. Turn up the value to accelerate, lower the value to decelerate.)
}
void back(void) // set the backward motion
{
digitalWrite(M1,LOW); // motor A turns reverse and the wheel will go backward
digitalWrite(M2, LOW); // motor B turns reverse and the wheel will go backward
analogWrite(E1,150); // speed of motor A
analogWrite(E2, 150); // speed of motor B
}
void turnL(void) // set the left turn
{
digitalWrite(M1,LOW); // motor A turns reverse and the wheel will go backward
digitalWrite(M2, HIGH); // motor B turns forward and the wheel goes forward, the smart car will turn left.
analogWrite(E1,150); // speed of motor A
analogWrite(E2, 150); // speed of motor B
}
void turnR(void) // set the right turn
{
digitalWrite(M1,HIGH); // motor A turns forward and the wheel will go forward
digitalWrite(M2,LOW); // motor B turns reverse and the wheel goes backward, the smart car will turn right.
analogWrite(E1,150); // speed of motor A
analogWrite(E2, 150); // speed of motor B
}
void stopp(void) // set the STOP
{
digitalWrite(M1,LOW); // motor A turns reverse
digitalWrite(M2, LOW); // motor B turns reverse
analogWrite(E1, 0); // speed of motor A, speed as zero, means stop
analogWrite(E2, 0); // speed of motor B, speed as zero, means stop
}
void loop()
{
advance(); // go forward
delay(1000); // delay1S
back(); //backward
delay(1000);// delay1S
turnL(); //turn left
delay(1000);//delay1S
turnR(); //turn right
delay(1000); //delay1S
stopp(); // stop
delay(1000);// delay1S
}
6.Test Result
Stack well the drive shield onto UNO R3 board, and upload the above code to the board, then press down the POWER button, you should see the motor go forward for one second, backward one second, then turn left for one second, turn right for one second and stop one second, alternately repeating.