5.7 Sistema di controllo della temperatura
5.7.1 Sensore di temperatura e umidità DHT11
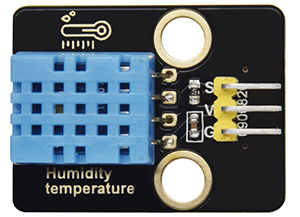
Il sensore di temperatura e umidità DHT11 emette segnali digitali. Applica i principi di acquisizione e conversione del segnale analogico, nonché la tecnologia di rilevamento della temperatura e dell’umidità, in modo da offrire stabilità a lungo termine e alta affidabilità. Inoltre, il sensore integra un sensore di umidità resistivo ad alta precisione e un sensore di temperatura termo-sensibile resistivo, ed è collegato a una MCU a 8 bit ad alte prestazioni.
Aprire il codice 5.7.4Temperature-Control-System con Arduino IDE
#include <dht11.h>
#define DHT11PIN 17
dht11 DHT11;
void setup()
{
Serial.begin(9600);
Serial.println("PROGRAMMA DI TEST DHT11 ");
Serial.print("VERSIONE LIBRERIA: ");
Serial.println(DHT11LIB_VERSION);
Serial.println();
}
void loop()
{
Serial.println("\n");
int chk = DHT11.read(DHT11PIN);
Serial.print("Lettura sensore: ");
switch (chk)
{
case DHTLIB_OK:
Serial.println("OK");
break;
case DHTLIB_ERROR_CHECKSUM:
Serial.println("Errore checksum");
break;
case DHTLIB_ERROR_TIMEOUT:
Serial.println("Errore timeout");
break;
default:
Serial.println("Errore sconosciuto");
break;
}
Serial.print("Umidità (%): ");
Serial.println((float)DHT11.humidity, 2);
Serial.print("Temperatura (oC): ");
Serial.println((float)DHT11.temperature, 2);
Serial.print("Temperatura (oF): ");
Serial.println(Fahrenheit(DHT11.temperature), 2);
Serial.print("Temperatura (K): ");
Serial.println(Kelvin(DHT11.temperature), 2);
Serial.print("Punto di rugiada (oC): ");
Serial.println(dewPoint(DHT11.temperature, DHT11.humidity));
Serial.print("Punto di rugiada rapido (oC): ");
Serial.println(dewPointFast(DHT11.temperature, DHT11.humidity));
delay(2000);
}
double Fahrenheit(double celsius)
{
return 1.8 * celsius + 32;
} //Converte gradi Celsius in gradi Fahrenheit
double Kelvin(double celsius)
{
return celsius + 273.15;
} //Converte gradi Celsius in Kelvin
//Punto di rugiada. L'aria è satura e si forma rugiada a questa temperatura.
//Riferimento: http://wahiduddin.net/calc/density_algorithms.htm
double dewPoint(double celsius, double humidity)
{
double A0= 373.15/(273.15 + celsius);
double SUM = -7.90298 * (A0-1);
SUM += 5.02808 * log10(A0);
SUM += -1.3816e-7 * (pow(10, (11.344*(1-1/A0)))-1) ;
SUM += 8.1328e-3 * (pow(10,(-3.49149*(A0-1)))-1) ;
SUM += log10(1013.246);
double VP = pow(10, SUM-3) * humidity;
double T = log(VP/0.61078); // variabile temporanea
return (241.88 * T) / (17.558-T);
}
// Calcola rapidamente il punto di rugiada, la sua velocità è 5 volte quella di dewPoint()
// Riferimento: http://en.wikipedia.org/wiki/Dew_point
double dewPointFast(double celsius, double humidity)
{
double a = 17.271;
double b = 237.7;
double temp = (a * celsius) / (b + celsius) + log(humidity/100);
double Td = (b * temp) / (a - temp);
return Td;
}
Scegliere la scheda ESP32 Dev Module e la porta COM, quindi caricare il codice.

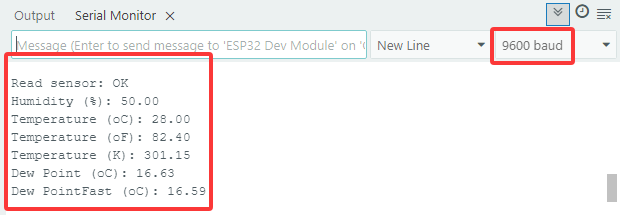
Risultato del test:
Aprire il monitor seriale e impostare la velocità di trasmissione a 9600, il monitor seriale visualizzerà il valore attuale di temperatura e umidità.
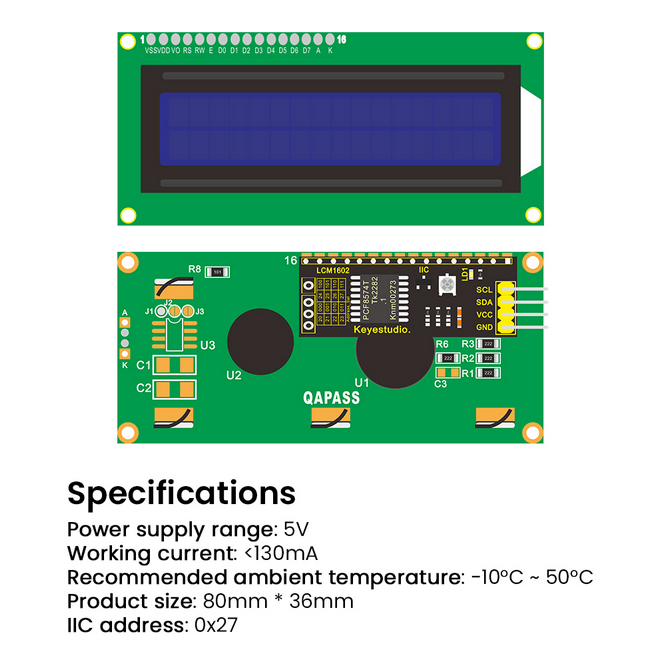
5.7.2 Modulo LCD 1602
L’LCD 1602 possiede un’interfaccia standard a 14 pin (senza retroilluminazione) o 16 pin (con retroilluminazione), risparmiando i pin della MCU. Il suo display pilota l’IC per realizzare il controllo I2C.
Aprire il codice 5.7.2LCD1602 con Arduino IDE.
#include <LiquidCrystal_I2C.h>
//Inizializza LCD 1602, 0x27 è l'indirizzo I2C
LiquidCrystal_I2C lcd(0x27,16,2);
void setup() {
//Inizializza LCD
lcd.init();
// Spegne/accende la retroilluminazione (opzionale)
lcd.backlight();
//lcd.noBacklight();
//Imposta la posizione del cursore
lcd.setCursor(0, 0);
//Stampa su LCD
lcd.print("HELLO WORLD 0");
lcd.setCursor(0, 1);
lcd.print("HELLO WORLD 1");
//Cancella i display
// lcd.clear();
}
void loop() {
// Accende/spegne il display (rapidamente)
//lcd.noDisplay();
//lcd.display();
// Accende/spegne il cursore sottolineato
//lcd.noCursor();
//lcd.cursor();
// Accende e spegne il cursore lampeggiante
// lcd.noBlink();
// lcd.blink();
// Questi comandi scorrono il display senza modificare la RAM
//lcd.scrollDisplayLeft();
//lcd.scrollDisplayRight();
// Questo è per il testo che scorre da sinistra a destra
//lcd.leftToRight();
//lcd.rightToLeft();
// Questo "giustificherà a destra" il testo dal cursore
//lcd.autoscroll();
//lcd.noAutoscroll();
Scegliere la scheda **ESP32 Dev Module** e la porta **COM**, quindi caricare il codice.

**Risultato del test:**
LCD1602 accende la sua retroilluminazione e visualizza "HELLO WORLD 0" e "HELLO WORLD 1".

#### 5.7.3 Motore e Ventola
Il motore 130 è in grado di regolare la velocità tramite PWM. Durante il processo, sono necessari due pin da collegare per il controllo.

Aprire il codice **5.7.3Motor** con Arduino IDE.
```c
#define MotorPin1 19 //(IN+)
#define MotorPin2 18 //(IN-)
void setup() {
pinMode(MotorPin1, OUTPUT);
pinMode(MotorPin2, OUTPUT);
}
void loop() {
//corotation
analogWrite(MotorPin1, 255); //Regola la velocità del motore modificando il valore analogico in uscita nell'intervallo 0-255
analogWrite(MotorPin2, 0);
delay(2000);
//Stop Transition
delay(200);
analogWrite(MotorPin1, 0);
analogWrite(MotorPin2, 0);
delay(200);
//reversal
analogWrite(MotorPin1, 0);
analogWrite(MotorPin2, 255);
delay(2000);
//Stop
analogWrite(MotorPin1, 0);
analogWrite(MotorPin2, 0);
delay(2000);
}
Scegliere la scheda ESP32 Dev Module e la porta COM, quindi caricare il codice.
Risultato del test:
Il motore 130 ruota alternativamente a sinistra e a destra ogni 2 secondi.
NOTA: Poiché la ventola è un dispositivo elettronico ad alta potenza, ricordarsi di utilizzare le batterie per alimentarla.
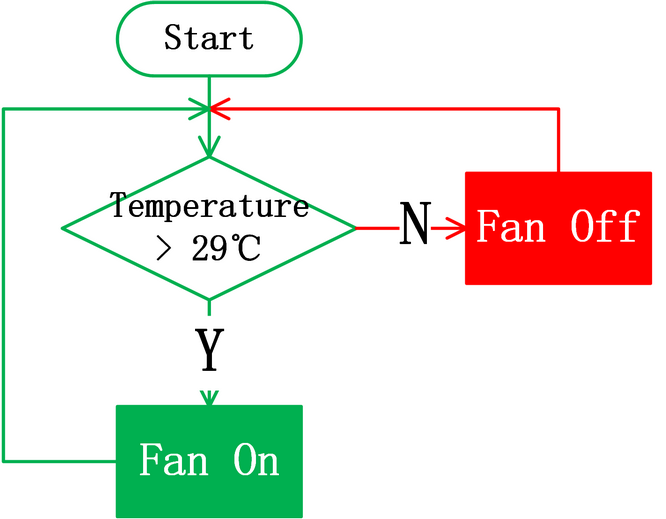
5.7.4 Sistema di Controllo della Temperatura
Aprire il codice 5.7.4Temperature-Control-System con Arduino IDE.
#include <LiquidCrystal_I2C.h>
#include <dht11.h>
#define DHT11PIN 17
#define MotorPin1 19 //(IN+)
#define MotorPin2 18 //(IN-)
dht11 DHT11;
LiquidCrystal_I2C lcd(0x27, 16, 2);
void setup() {
lcd.init();
lcd.backlight();
pinMode(MotorPin1, OUTPUT);
pinMode(MotorPin2, OUTPUT);
}
void loop() {
//Definisci il valore di temperatura e umidità
int Temperature;
int Humidity;
//Leggi il valore
int chk = DHT11.read(DHT11PIN);
Temperature = DHT11.temperature;
Humidity = DHT11.humidity;
lcd.setCursor(0, 0);
lcd.print("Temp:");
lcd.setCursor(5, 0);
lcd.print(Temperature);
lcd.setCursor(0, 1);
lcd.print("Hum:");
lcd.setCursor(5, 1);
lcd.print(Humidity);
delay(500);
if (Temperature >= 29) {
//Gira a sinistra
analogWrite(MotorPin1, 150); //Regola la velocità del motore modificando il valore analogico in uscita nell'intervallo 0-255
analogWrite(MotorPin2, 0);
} else {
//Stop
delay(3000);
analogWrite(MotorPin1, 0);
analogWrite(MotorPin2, 0);
delay(200);
}
}
Scegliere la scheda ESP32 Dev Module e la porta COM, quindi caricare il codice.
Risultato del test:
Quando la temperatura raggiunge i 29°C, la ventola si accende per dissipare il calore. Quando è inferiore a 29°C, la ventola si spegne (la ventola simula solo la dissipazione del calore, quindi l’effetto non è buono), il che consente di risparmiare energia per l’azienda agricola.