Projekt 8 Motorsteuerung und Geschwindigkeitsregelung
1. Beschreibung
Es gibt viele Möglichkeiten, Motoren anzusteuern. Unser Auto verwendet den am häufigsten eingesetzten DRV8833 Motor-Treiber-Chip, der eine zweikanalige Brückenantriebslösung für Spielzeuge, Drucker und andere integrierte Motoranwendungen bietet.
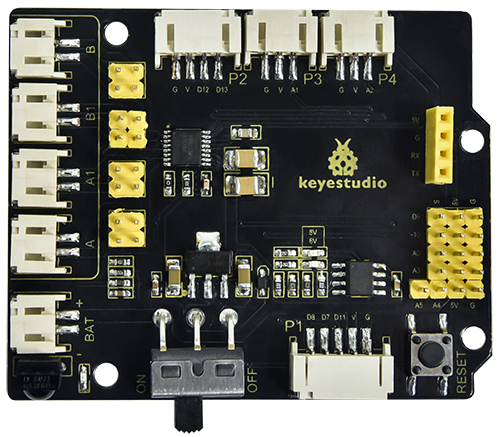
Wenn wir die Treiber-Erweiterungsplatine auf das 4.0 Entwicklungsboard stecken und die BAT einschalten, und dann den DIP-Schalter auf die ON-Seite stellen, wird die externe Stromversorgung beide Platinen gleichzeitig mit Strom versorgen. Zur Erleichterung der Verkabelung verfügt die Treiber-Erweiterungsplatine über einen Verpolungsschutzanschluss (PH2.0-2P-3P-4P-5P). Sie können die Motoren, die Stromversorgung und Sensormodule direkt an die Treiber-Erweiterungsplatine anschließen.
Die Bluetooth-Schnittstelle der Treiber-Erweiterungsplatine ist vollständig kompatibel mit dem DX-BT24 5.1 Bluetooth-Modul. Beim Anschluss des Bluetooth-Moduls müssen Sie es nur in die entsprechende Schnittstelle stecken. Gleichzeitig werden 2,54 mm Stiftleisten verwendet, um einige ungenutzte digitale und analoge Ports auf der Treiber-Erweiterungsplatine herauszuführen, sodass Sie weitere Sensoren hinzufügen und Erweiterungsexperimente durchführen können.
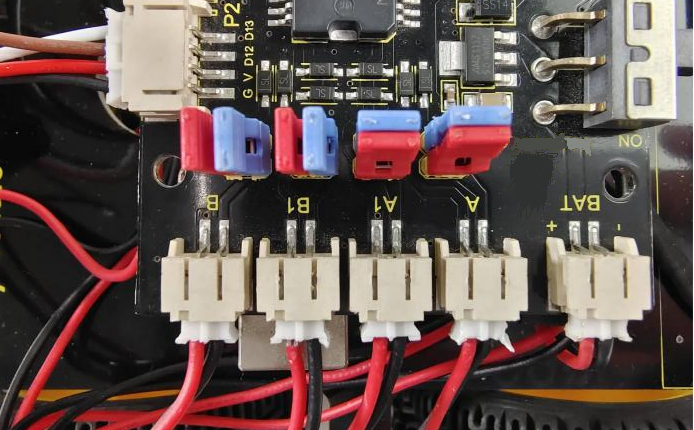
Die Erweiterungsplatine kann an vier Gleichstrommotoren angeschlossen werden. Wenn die Jumper-Kappen standardmäßig verbunden sind, sind die Motoren der Ports A und A1 sowie B und B1 parallel geschaltet und haben das gleiche Bewegungsverhalten. 8 Jumper-Kappen können verwendet werden, um die Drehrichtung der 4 Motoranschlüsse zu steuern.
Zum Beispiel, wenn die 2 Jumper-Kappen vor B1 des M1-Motors von Quer- auf Längsverbindung geändert werden, dreht sich der M1-Motor in die entgegengesetzte Richtung zur ursprünglichen Drehrichtung.
2. Spezifikation
Eingangsspannung für Logik: DC 5V
Eingangsspannung für Antrieb: DC 6-9 V
Arbeitsstrom für Logik: <36mA
Arbeitsstrom für Antrieb: <2A
Maximale Verlustleistung: 25W (T=75℃)
Eingangspegel für Steuersignal: High-Pegel ist 2,3V<Vin<5V, Low-Pegel ist -0,3V<Vin<1,5V
Arbeitstemperatur: -25 bis +130℃
3. Keyestudio 8833 Motor-Treiber-Erweiterungsplatine
Funktionsprinzip
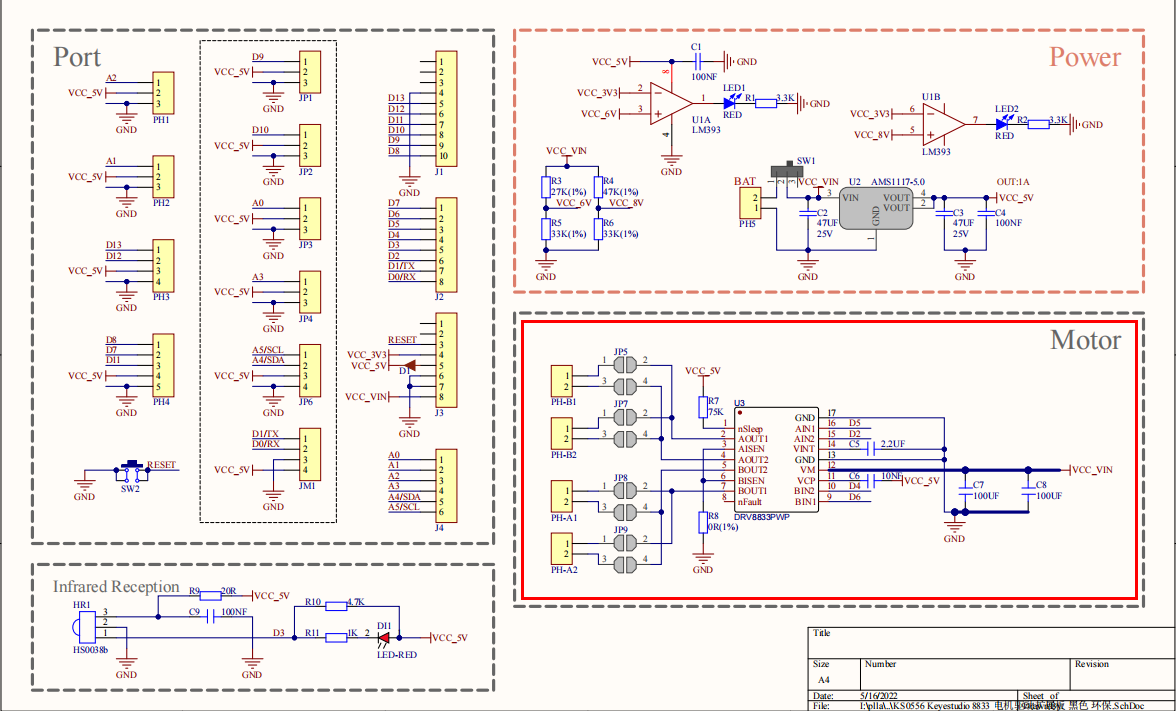
Wir verwenden für die vier Motoren die gleiche Seiten-Parallel-Schaltung, die als zwei Motorgruppen betrachtet werden kann. Wie im Schaltplan gezeigt, sind B und B1 eine Gruppe, und A und A1 eine Gruppe.
Die Motoren in derselben Gruppe sollten sich in die gleiche Richtung drehen. Wenn sie unterschiedlich sind, passen Sie bitte die entsprechenden Jumper-Kappen neben dem Anschluss an, um die Richtung zu ändern.
Wie unten gezeigt, wenn die Richtungen von A und A1 unterschiedlich sind, justieren Sie die Richtung der Jumper-Kappen, bis die Bewegungsrichtung der Motoren in derselben Gruppe übereinstimmt.
Aus dem obigen Diagramm ist ersichtlich, dass der Richtungs-Pin des A-Motors D4 ist, der Geschwindigkeits-Pin D6; D2 ist der Richtungs-Pin des B-Motors; und D6 ist der Geschwindigkeits-Pin.
PWM steuert das Roboterauto. Der PWM-Wert liegt im Bereich von 0-255. Wenn wir die Richtung auf HIGH setzen, gilt: Je kleiner die PWM-Zahl, desto schneller dreht sich der Motor.
| D2 | D5(PWM) | B Motor(links) | D4 | D6(PWM) | A Motor(rechts) | |
| Vorwärts fahren | HIGH | 255-200 | Dreht im Uhrzeigersinn | HIGH | 255-200 | Dreht im Uhrzeigersinn |
| Rückwärts fahren | LOW | 200 | Dreht gegen den Uhrzeigersinn | LOW | 200 | Dreht gegen den Uhrzeigersinn |
| Links abbiegen | HIGH | 255-200 | Dreht im Uhrzeigersinn | LOW | 200 | Dreht gegen den Uhrzeigersinn |
| Rechts abbiegen | LOW | 200 | Dreht gegen den Uhrzeigersinn | HIGH | 255-200 | Dreht im Uhrzeigersinn |
Development Board *1 |
8833 Motor Driver *1 |
USB-Kabel*1 |
|---|---|---|
|
|
|
18650 Batteriehalter*1 |
Motor*4 |
18650 Batterie *2(selbst bereitgestellt) |
|
|
|





5. Schaltplan
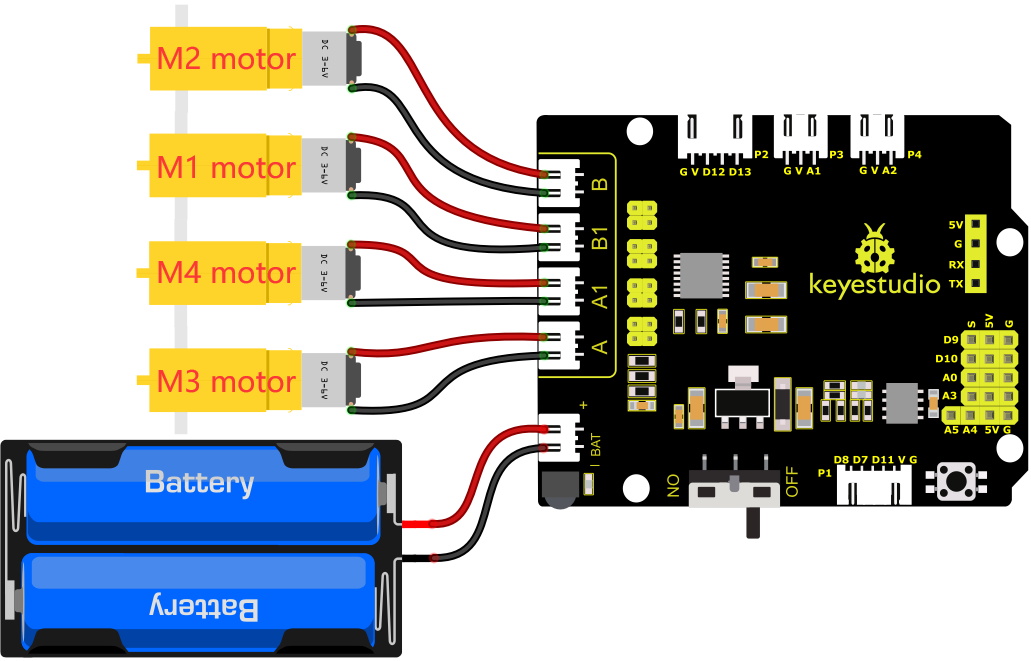
Verbinden Sie die Stromversorgung mit dem BAT-Anschluss.
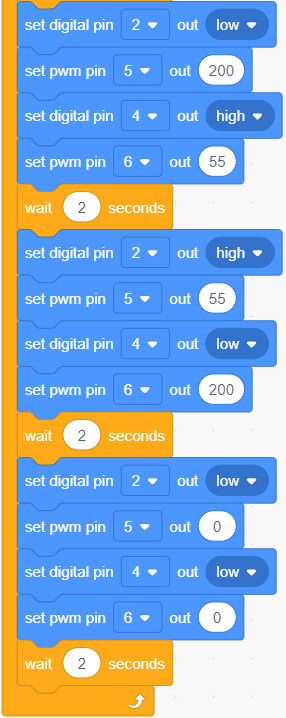
6. Testcode
Sie können Blöcke ziehen, um sie zu bearbeiten. Die unten aufgeführten Blöcke dienen als Referenz
(1).
(2).
(3).
Vollständiger Testcode

7. Testergebnis
Nachdem der Code erfolgreich auf das V4.0-Board hochgeladen wurde, verbinden Sie die Verkabelung gemäß dem Schaltplan, schalten Sie dann die externe Stromversorgung ein und stellen Sie den DIP-Schalter auf ON. Das Auto fährt 2 Sekunden vorwärts, 2 Sekunden rückwärts, 2 Sekunden nach links, 2 Sekunden nach rechts und hält dann 2 Sekunden an.
8. Code-Erklärung
Passen Sie die Geschwindigkeit an, mit der PWM den Motor steuert, schließen Sie auf die gleiche Weise an.
Vollständiger Testcode

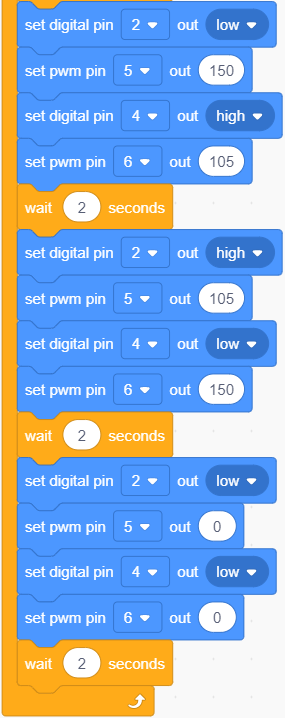
Nachdem der Code erfolgreich auf das V4.0-Board hochgeladen wurde, verbinden Sie die Verkabelung gemäß dem Schaltplan, schalten Sie dann die externe Stromversorgung ein und stellen Sie den DIP-Schalter auf ON. Dann stellen Sie fest, dass die Geschwindigkeit des Motors viel langsamer ist.
Hinweis: Eine niedrige Batteriespannung führt zu einer langsameren Motordrehzahl.