Projekt 15 Bluetooth-gesteuertes Smart Car

1. Beschreibung
Wir haben die Grundlagen von Bluetooth gelernt. In dieser Lektion werden wir ein Bluetooth-gesteuertes Smart Car bauen. In diesem Projekt betrachten wir das Mobiltelefon als Sender (Host) und das Smart Car, das mit dem BT24 Bluetooth-Modul (Slave) verbunden ist, als Empfänger. Die Steuerung des Smart Cars erfolgt über die mobile APP via Bluetooth.
2. APP-Steuertasten
Taste |
Funktion |
|---|---|
|
Koppeln des DX-BT24 5.1 Bluetooth-Moduls |
|
Bluetooth trennen |


Steuerzeichen |
Funktion |
|
|---|---|---|
|
Drücken: F |
Taste drücken, das Auto fährt vorwärts; |
|
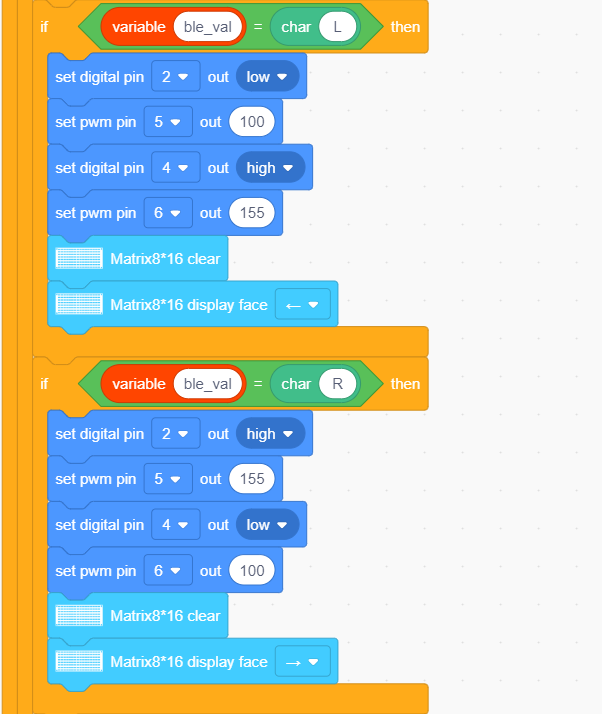
Drücken: L |
Taste drücken, das Auto dreht nach links; |
|
Drücken: R |
Taste drücken, das Auto dreht nach rechts; |
|
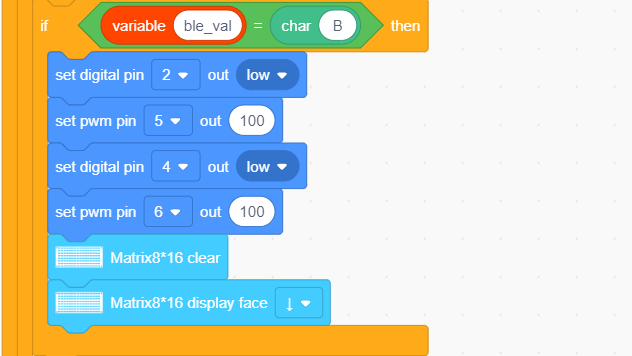
Drücken: B |
Taste drücken, das Auto fährt rückwärts; |
|
Drücken: „a“ |
Klicken zum Beschleunigen (maximal: 255) |
|
Drücken: „d“ |
Klicken zum Verlangsamen (minimal: 0) |
|
Klicken zum Starten der Schwerkraft- |
|
|
Klicken zum Senden von „X“, |
Linienverfolgungsfunktion starten; |
|
Klicken zum Senden von „Y“, |
Ultraschall-Hindernisvermeidung starten; |
|
Klicken zum Senden von „U“, |
Ultraschall-Folgefunktion starten; |
|
Klicken zum Senden von „G“, |
Begrenzungsfunktion starten; |











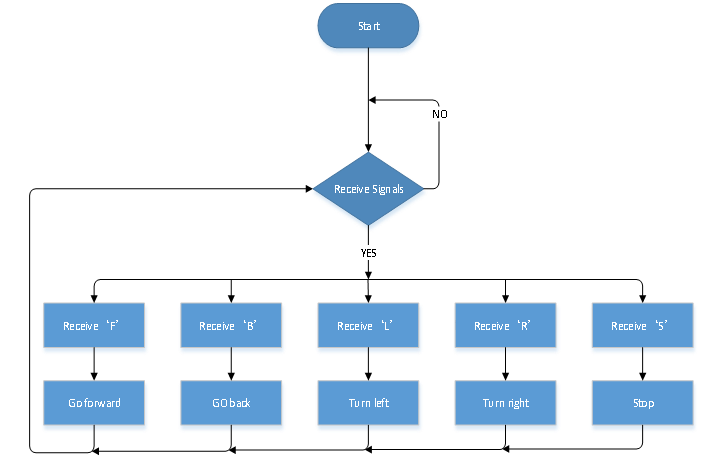
3. Flussdiagramm
4. Schaltplan
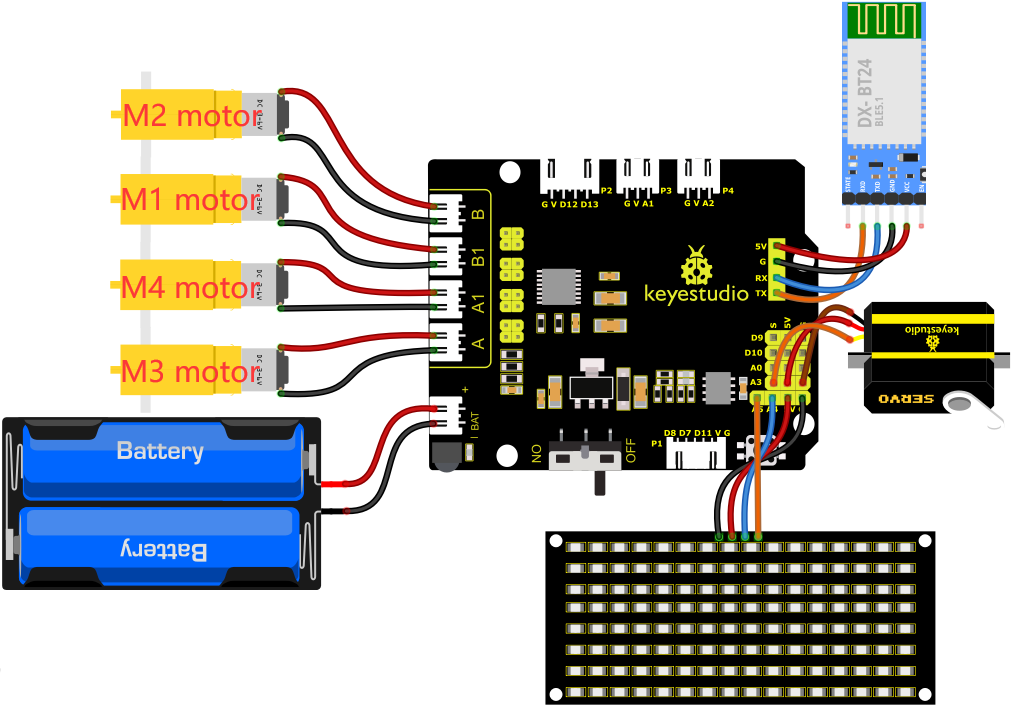
1). GND, VCC, SDA und SCL der 8*8 LED-Anzeige sind mit G (GND), V (VCC), A4 und A5 des Erweiterungsboards verbunden.
2). RXD, TXD, GND und VCC des Bluetooth-Moduls sind jeweils mit TX, RX, G und 5V auf dem 8833 Motor-Treiber-Erweiterungsboard verbunden, während die STATE- und BRK-Pins des Bluetooth-Moduls nicht angeschlossen werden müssen.
3). Der Servo ist mit G, V und A3 verbunden. Das braune Kabel ist mit Gnd (G), das rote Kabel mit 5V (V) und das orange Kabel mit A3 verbunden.
4). Die Stromversorgung ist mit dem BAT-Anschluss verbunden.
5. Testcode
Bevor der Code geschrieben wird, ist es notwendig, die Bibliotheksdateien des 8x16 LED-Boards und des Servos zu importieren. Die konkreten Schritte sind wie folgt:
Klicken Sie auf  , um die Erweiterungsbibliothek-Schnittstelle für Sensoren/Module/Komponenten zu öffnen, suchen Sie dann nach dem „Matrix 8*16 Aip1640“-Modul
, um die Erweiterungsbibliothek-Schnittstelle für Sensoren/Module/Komponenten zu öffnen, suchen Sie dann nach dem „Matrix 8*16 Aip1640“-Modul  und klicken Sie darauf. Dadurch ändert sich „Not loaded“ zu „loaded“, was anzeigt, dass das „Matrix 8*16 Aip1640“-Modul erfolgreich hinzugefügt wurde.
und klicken Sie darauf. Dadurch ändert sich „Not loaded“ zu „loaded“, was anzeigt, dass das „Matrix 8*16 Aip1640“-Modul erfolgreich hinzugefügt wurde.
Klicken Sie auf  , um zur Code-Editor-Oberfläche zurückzukehren. Der Anweisungsblock des hinzugefügten „Matrix 8*16 Aip1640“-Moduls und der „Servo“-Komponente ist im Modulbereich sichtbar.
, um zur Code-Editor-Oberfläche zurückzukehren. Der Anweisungsblock des hinzugefügten „Matrix 8*16 Aip1640“-Moduls und der „Servo“-Komponente ist im Modulbereich sichtbar.
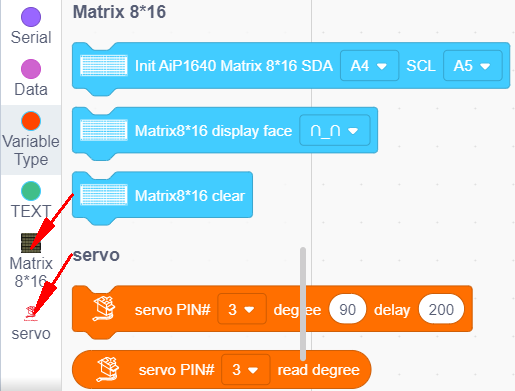
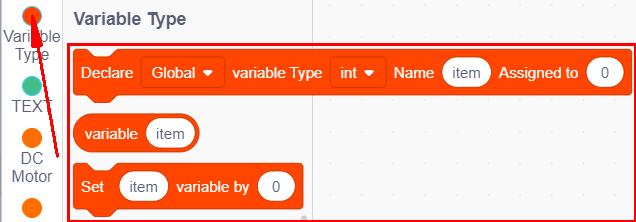
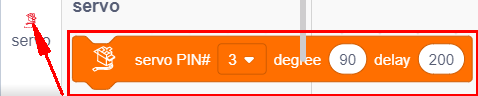
Sie können Blöcke ziehen, um sie zu bearbeiten. Die unten aufgeführten Blöcke dienen als Referenz.
(1).
(2).
(3).
(4).
(5).
(6).
(7).
(8).
(9).
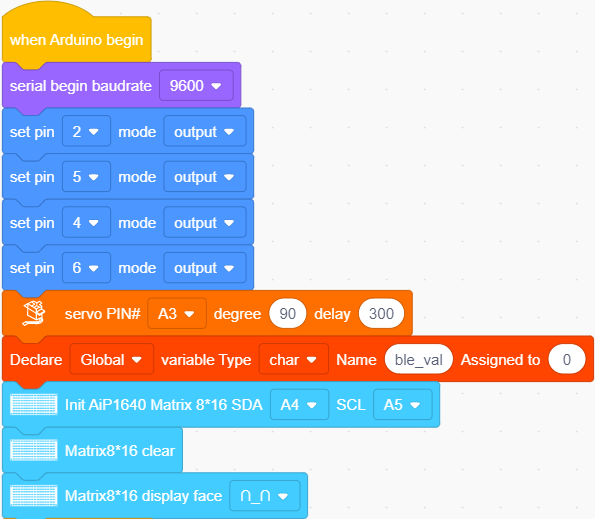
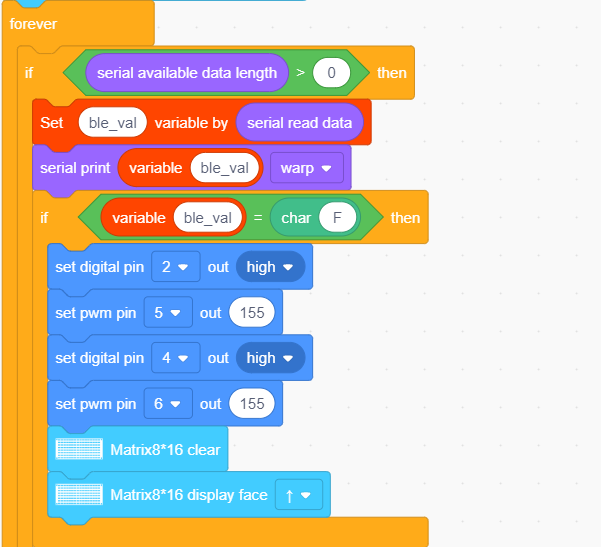
Vollständiger Testcode
Hinweis: Vor dem Hochladen des Testcodes müssen Sie das Bluetooth-Modul entfernen, da sonst der Code nicht hochgeladen werden kann. Verbinden Sie das Bluetooth-Modul erst nach erfolgreichem Hochladen des Codes wieder.
6. Testergebnis
Nachdem der Code erfolgreich auf das V4.0-Board hochgeladen wurde, verbinden Sie die Verkabelung gemäß dem Schaltplan, schalten Sie die externe Stromversorgung ein und stellen Sie den DIP-Schalter auf ON.
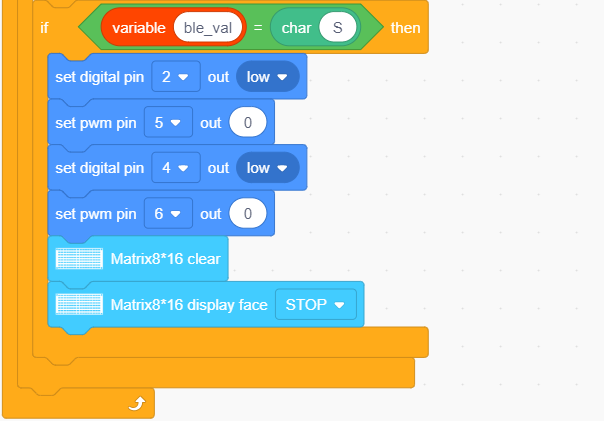
Setzen Sie das BT-Modul ein und öffnen Sie Ihr Handy, um die Bluetooth-Verbindung herzustellen und das Smart Car zu steuern. Das Auto wird vorwärts, rückwärts fahren, nach links und rechts abbiegen und anhalten. Außerdem zeigt das 8*8 LED-Board die entsprechenden Muster an.