プロジェクト10:ライトフォロータンク
(1)概要:
前回のプロジェクトでは、スマートカーに搭載されている各種センサー、モジュール、拡張ボードの使い方について詳しく説明しました。ここからはスマートカーを使ったプロジェクトに移ります。ライトフォロースマートカーとは、その名の通り光を追いかけることができるスマートカーです。
フォトレジスターとモータードライブのプロジェクトで学んだ知識を組み合わせて、光追尾スマートカーを作ることができます。このプロジェクトでは、2つのフォトレジスターモジュールを使用してスマートカーの左右の光の強度を検出し、対応するアナログ値を読み取り、その2つのデータに基づいて2つのモーターの回転を制御することで、スマートカーの動きを制御します。
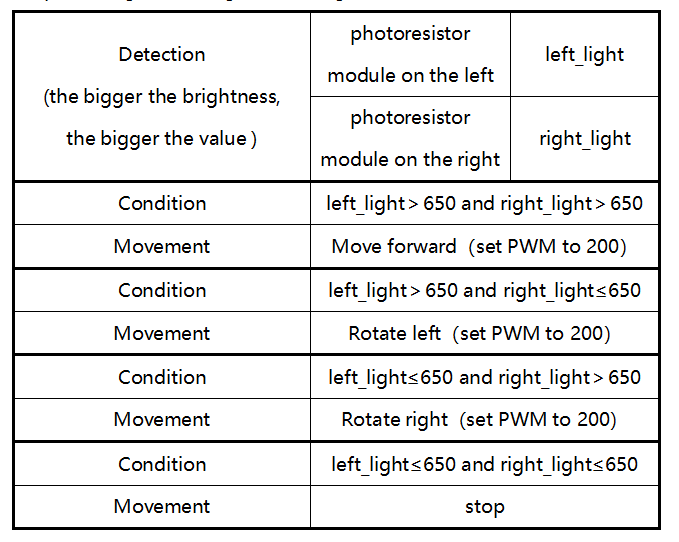
ライトフォロースマートカーの具体的なロジックは以下の通りです。
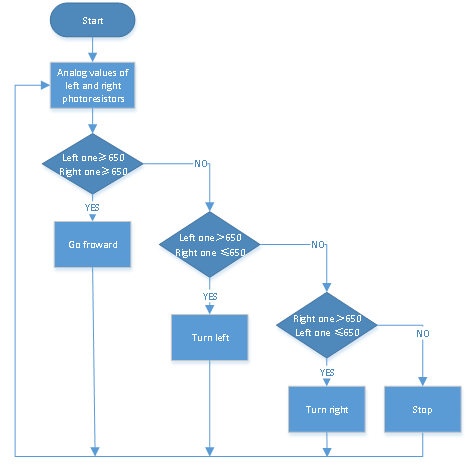
(2)フローチャート:
(3)接続図:
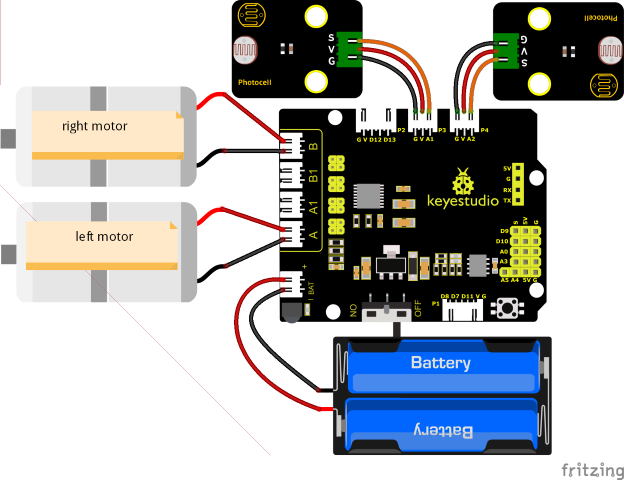
注意: 左フォトレジスターモジュールのピン「G」、「V」、Sはそれぞれ G (GND)、V (VCC)、A1 に接続されています;
右フォトレジスターモジュールのピン「G」、「V」、Sはそれぞれ G (GND)、V (VCC)、A2 に接続されています。
4ピンケーブルにはA、A1、B1、Bの表示があります。右後方モーターは8833モータードライバー拡張ボードのBポートに接続し、左前方モーターはAポートに接続します。
(4)テストコード:
(注意: コードをアップロードする前にBluetoothモジュールを接続しないでください。コードのアップロードもシリアル通信を使用するため、Bluetoothシリアル通信と競合が発生し、アップロードが失敗する可能性があります。)
/*
Keyestudio Mini Tank Robot V3 (Popular Edition)
lesson 10
light follow tank
http://www.keyestudio.com
*/
#define light_L_Pin A1 //左側の光センサーのピンを定義する
#define light_R_Pin A2 //右側の光センサーのピンを定義する
#define ML_Ctrl 4 //左モーターの方向制御ピンを定義する
#define ML_PWM 6 //左モーターのPWM制御ピンを定義する
#define MR_Ctrl 2 //右モーターの方向制御ピンを定義する
#define MR_PWM 5 //右モーターのPWM制御ピンを定義する
int left_light;
int right_light;
void setup()
{
Serial.begin(9600);
pinMode(light_L_Pin, INPUT);
pinMode(light_R_Pin, INPUT);
pinMode(ML_Ctrl, OUTPUT);
pinMode(ML_PWM, OUTPUT);
pinMode(MR_Ctrl, OUTPUT);
pinMode(MR_PWM, OUTPUT);
}
void loop()
{
left_light = analogRead(light_L_Pin);
right_light = analogRead(light_R_Pin);
Serial.print("left_light_value = ");
Serial.println(left_light);
Serial.print("right_light_value = ");
Serial.println(right_light);
if (left_light > 650 && right_light > 650) //前進
{
Car_front();
}
else if (left_light > 650 && right_light <= 650) //左折
{
Car_left();
}
else if (left_light <= 650 && right_light > 650) //右折
{
Car_right();
}
else //それ以外は停止
{
Car_Stop();
}
}
void Car_front()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 55);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 55);
}
void Car_left()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 55);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 200);
}
void Car_right()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 200);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 55);
}
void Car_Stop()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 0);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 0);
}
(5)テスト結果
テストコードのアップロードが完了し、配線図通りに接続し、DIPスイッチを右端に切り替えて電源を入れると、スマートカーは光を追いかけて動きます。