プロジェクト12:超音波障害物回避タンク

(1)概要:
前のプロジェクトでは、超音波を使った追跡スマートカーを作りました。実際には、同じコンポーネントと同じ配線方法を使い、テストコードを変更するだけで、超音波障害物回避スマートカーに変えることができます。このスマートカーは人の手の動きに合わせて動くことができます。
超音波センサーを使って、スマートカーと前方の障害物との距離を検出し、そのデータに基づいて2つのモーターの回転を制御することで、スマートカーの動きを制御します。
検出 |
|
|---|---|
超音波センサーで測定したカーと前方の障害物との距離 |
a(cm) |
超音波センサーで測定したカーと右側の障害物との距離 |
a2(cm) |
超音波センサーで測定したカーと左側の障害物との距離 |
a1(cm) |
設定: サーボの開始角度を90°に設定する |
条件1 |
条件2 |
条件3 |
動作 |
|---|---|---|---|
a<20 |
500ms停止; |
||
a1<50 |
a1とa2を比較する |
||
a1>a2 |
サーボの角度を90°に設定し、700ms左回転(PWMを255に設定) |
||
a1<a2 |
サーボの角度を90°に設定し、700ms右回転(PWMを255に設定) |
||
条件1 |
条件2 |
動作 |
|
a<20 |
a1≥50 |
ランダム |
サーボの角度を90°に設定し、500ms左回転(PWMを255に設定) |
条件 |
動作 |
||
a≥20 |
前進(PWMを100に設定) |
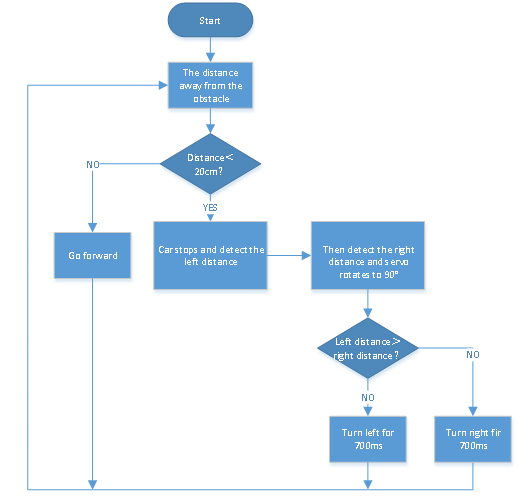
(2)フローチャート:
(3)接続図:
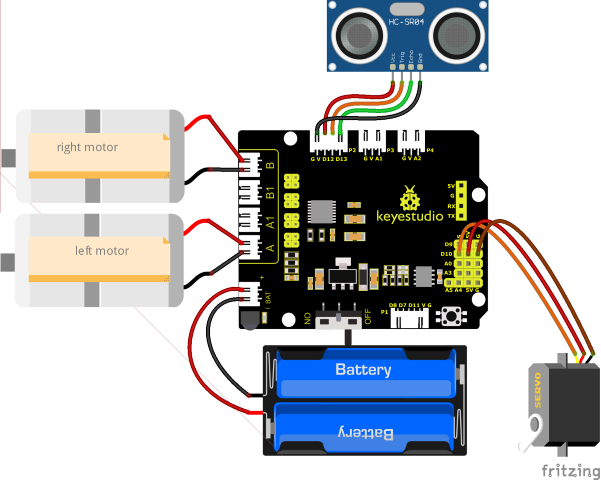
(注意: サーボの茶色、赤色、オレンジ色のワイヤーはそれぞれ拡張ボードのG(GND)、V(5V)、D10に接続します;超音波センサーについては、VCCピンを5v(V)に、Trigピンをデジタル12(S)に、Echoピンをデジタル13(S)に、GndピンをGnd(G)に接続します;前のプロジェクトと同様です。)
(4)テストコード:
(注意: コードをアップロードする前にBluetoothモジュールを接続しないでください。コードのアップロードもシリアル通信を使用するため、Bluetoothシリアル通信と競合し、アップロードが失敗する可能性があります。)
/*
Keyestudio Mini Tank Robot V3 (Popular Edition)
lesson 12
Ultrasonic avoid tank
http://www.keyestudio.com
*/
#define servoPin 10 //サーボのピン
int a, a1, a2;
#define ML_Ctrl 4 //左モーターの方向制御ピンを定義する
#define ML_PWM 6 //左モーターのPWM制御ピンを定義する
#define MR_Ctrl 2 //右モーターの方向制御ピンを定義する
#define MR_PWM 5 //右モーターのPWM制御ピンを定義する
#define Trig 12
#define Echo 13
float distance;
void setup()
{
Serial.begin(9600);
pinMode(servoPin, OUTPUT);
pinMode(Trig, OUTPUT);
pinMode(Echo, INPUT);
pinMode(ML_Ctrl, OUTPUT);
pinMode(ML_PWM, OUTPUT);
pinMode(MR_Ctrl, OUTPUT);
pinMode(MR_PWM, OUTPUT);
procedure(90); //サーボの角度を90°に設定する
delay(500); //500ms遅延する
}
void loop()
{
a = checkdistance(); //超音波センサーで検出した前方への距離を変数aに代入する
if (a < 20) //前方への距離が20cm未満の場合
{
Car_Stop(); //ロボットが停止する
delay(500); //500ms遅延する
procedure(180); //超音波パンチルトが左を向く
delay(500); //500ms遅延する
a1 = checkdistance(); //超音波センサーで検出した左側への距離を変数a1に代入する
delay(100); //値を読み取る
procedure(0); //超音波パンチルトが右を向く
delay(500); //500ms遅延する
a2 = checkdistance(); //超音波センサーで検出した右側への距離を変数a2に代入する
delay(100); //値を読み取る
procedure(90); //90°に戻る
delay(500);
if (a1 > a2)
{ //左側への距離が右側より大きい場合
Car_left(); //ロボットが左折する
delay(700); //700ms左折する
}
else
{
Car_right(); //700ms右折する
delay(700);
}
}
else//前方への距離が20cm以上の場合、ロボットは前進する
{
Car_front(); //前進する
}
}
void Car_front()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 55);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 55);
}
void Car_back()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 200);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 200);
}
void Car_left()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 55);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 200);
}
void Car_right()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 200);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 55);
}
void Car_Stop()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 0);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 0);
}
//サーボを制御する関数
void procedure(byte myangle)
{
int pulsewidth;
for (int i = 0; i < 5; i++)
{
pulsewidth = myangle * 11 + 500; //パルス幅の値を計算する
digitalWrite(servoPin, HIGH);
delayMicroseconds(pulsewidth); //ハイレベルの時間がパルス幅を表す
digitalWrite(servoPin, LOW);
delay((20 - pulsewidth / 1000)); //サイクルは20msなので、残りの時間はローレベルになる
}
}
//超音波を制御する関数
float checkdistance()
{
float distance;
digitalWrite(Trig, LOW);
delayMicroseconds(2);
digitalWrite(Trig, HIGH);
delayMicroseconds(10);
digitalWrite(Trig, LOW);
distance = pulseIn(Echo, HIGH) / 58.20; //ここでの58.20は2*29.1=58.2から来ている
delay(10);
return distance;
}
(5)テスト結果:
テストコードを正常にアップロードし、配線を行い、DIPスイッチをON側に切り替えて電源を入れると、スマートカーは前進しながら自動的に障害物を回避します。