プロジェクト13: 限られたスペース内で動くタンク
(1)説明:
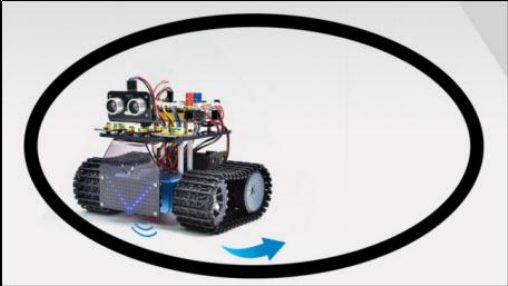
スマートカーの超音波追従および障害物回避機能については、以前のプロジェクトで紹介しました。ここでは、以前のコースの知識を組み合わせて、スマートカーを一定のスペース内で動くように制限することを目的としています。
実験では、ライントラッキングセンサーを使用してスマートカーの周囲に黒線があるかどうかを検出し、その検出結果に応じて2つのモーターの回転を制御することで、黒線で描かれた円の中にスマートカーを閉じ込めます。
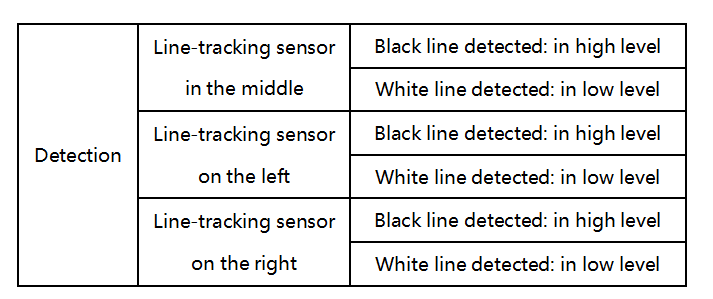
ライントラッキングスマートカーの具体的なロジックは、以下の表に示されています:
条件 |
動作 |
|---|---|
3つのライントラッキングセンサーのいずれかが黒線を検出した場合 |
後退する(PWMを150に設定)その後左折する(PWMを150に設定) |
いずれも黒線を検出しない場合 |
前進する(PWMを100に設定) |
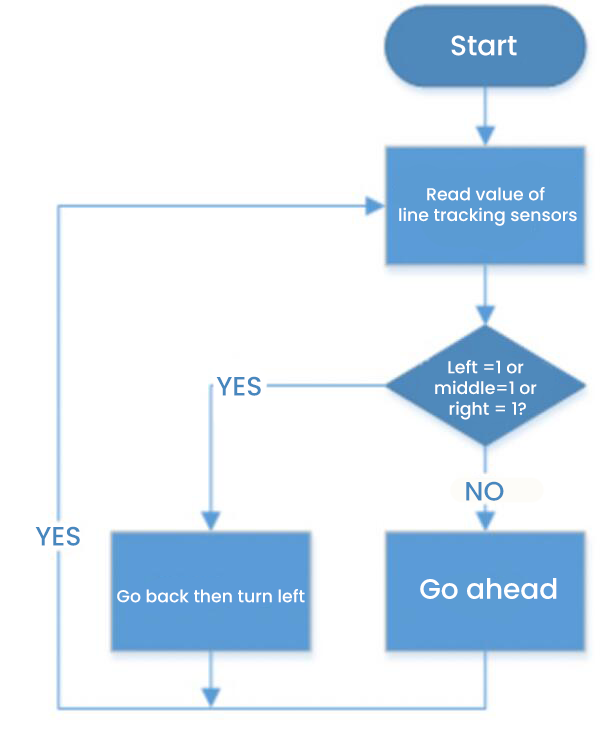
(2)フローチャート:
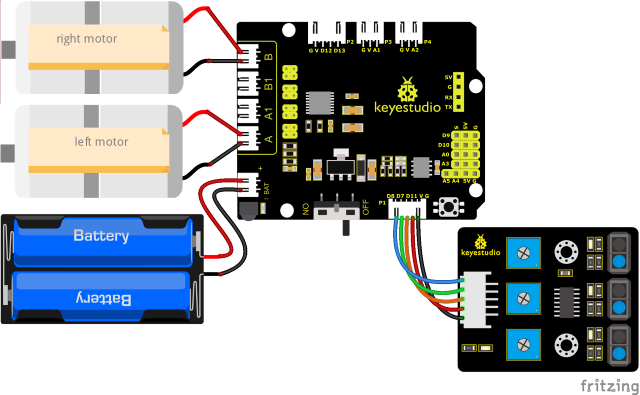
(3)接続図:
(4)テストコード:
(注意: コードをアップロードする前にBluetoothモジュールを接続しないでください。コードのアップロードにもシリアル通信を使用するため、Bluetoothシリアル通信と競合が発生し、アップロードに失敗する可能性があります。)
/*
Keyestudio Mini Tank Robot V3 (Popular Edition)
lesson 13
draw a circle for tank
http://www.keyestudio.com
*/
// ラインセンサーの配線
#define L_pin 11 // 左
#define M_pin 7 // 中央
#define R_pin 8 // 右
#define ML_Ctrl 4 // 左モーターの方向制御ピンを定義
#define ML_PWM 6 // 左モーターのPWM制御ピンを定義
#define MR_Ctrl 2 // 右モーターの方向制御ピンを定義
#define MR_PWM 5 // 右モーターのPWM制御ピンを定義
int L_val, M_val, R_val;
void setup()
{
Serial.begin(9600); // ボーレートを9600に設定
pinMode(L_pin, INPUT); // ラインセンサーの全ピンを入力モードに設定
pinMode(M_pin, INPUT);
pinMode(R_pin, INPUT);
pinMode(ML_Ctrl, OUTPUT);
pinMode(ML_PWM, OUTPUT);
pinMode(MR_Ctrl, OUTPUT);
pinMode(MR_PWM, OUTPUT);
}
void loop ()
{
L_val = digitalRead(L_pin); // 左センサーの値を読み取る
M_val = digitalRead(M_pin); // 中央センサーの値を読み取る
R_val = digitalRead(R_pin); // 右センサーの値を読み取る
if ( L_val == 0 && M_val == 0 && R_val == 0 ) // 黒線が検出されない場合、前進する
{
Car_front();
}
else // 黒線が検出された場合、後退してから左折する
{
Car_back();
delay(700);
Car_left();
delay(800);
}
}
void Car_front()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 100);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 100);
}
void Car_back()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 150);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 150);
}
void Car_left()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 100);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 150);
}
void Car_right()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 150);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 100);
}
void Car_Stop()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 0);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 0);
}
(5)テスト結果:
テストコードのアップロードが成功し、電源を入れると、スマートカーは黒線で描かれた円の中の限られたスペース内で動きます。