プロジェクト 18: BT スピードコントロールロボット
(1)説明:
前のプロジェクトでは、Bluetooth を使用してスマートタンクを制御する方法を学びました。前で使用したモーターの PWM 値は 200 でした(速度は 200)。
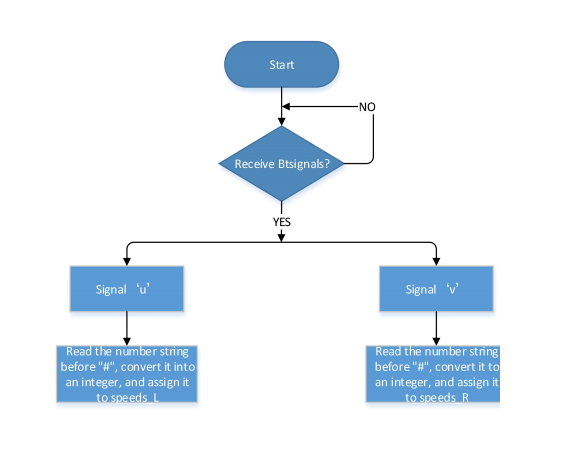
このレッスンでは、Bluetooth を使用してスマートカーの速度を調整します。200 の固定速度に限定されません。左右のモーターの速度値をそれぞれ格納するために 2 つの変数を定義します。これまでの学習を通じて、この値の範囲は 0 から 255 までしか取れないことがわかっています。
(2)フローチャート:
(3)接続図:
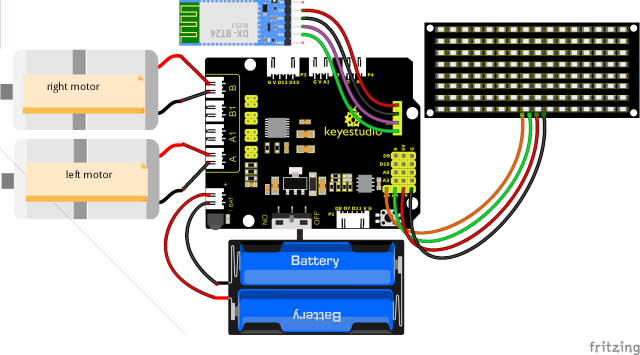
8x16 LED ドットマトリクスの GND、VCC、SDA、SCL はそれぞれ拡張ボードの -(GND)、+(VCC)、SDA、SCL に接続されています。
(4)テストコード:
(注意: コードをアップロードする際は、Bluetooth モジュールを必ず取り外してください。アップロード完了後に Bluetooth を再接続できます。そうしないとコードが書き込めない場合があります。)
/*
Keyestudio Mini Tank Robot V3 (Popular Edition)
lesson 18
bluetooth control speed tank
http://www.keyestudio.com
*/
// 配列:画像データの保存に使用。自分で計算するかモジュールツールから取得できます
unsigned char start01[] = {0x01, 0x02, 0x04, 0x08, 0x10, 0x20, 0x40, 0x80, 0x80, 0x40, 0x20, 0x10, 0x08, 0x04, 0x02, 0x01};
unsigned char front[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x24, 0x12, 0x09, 0x12, 0x24, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char back[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x24, 0x48, 0x90, 0x48, 0x24, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char left[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x44, 0x28, 0x10, 0x44, 0x28, 0x10, 0x44, 0x28, 0x10, 0x00};
unsigned char right[] = {0x00, 0x10, 0x28, 0x44, 0x10, 0x28, 0x44, 0x10, 0x28, 0x44, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char STOP01[] = {0x2E, 0x2A, 0x3A, 0x00, 0x02, 0x3E, 0x02, 0x00, 0x3E, 0x22, 0x3E, 0x00, 0x3E, 0x0A, 0x0E, 0x00};
unsigned char clear[] = {0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00};
unsigned char speed_a[] = {0x00, 0x00, 0x00, 0x20, 0x10, 0x08, 0x04, 0x02, 0xff, 0x02, 0x04, 0x08, 0x10, 0x20, 0x00, 0x00};
unsigned char speed_d[] = {0x00, 0x00, 0x00, 0x04, 0x08, 0x10, 0x20, 0x40, 0xff, 0x40, 0x20, 0x10, 0x08, 0x04, 0x00, 0x00};
#define SCL_Pin A5 // クロックのピンを A5 に設定
#define SDA_Pin A4 // データピンを A4 に設定
#define ML_Ctrl 4 // 左モーターの方向制御ピンを定義
#define ML_PWM 6 // 左モーターの PWM 制御ピンを定義
#define MR_Ctrl 2 // 右モーターの方向制御ピンを定義
#define MR_PWM 5 // 右モーターの PWM 制御ピンを定義
char ble_val; // 右モーターの PWM 制御ピンを定義
byte speeds_L = 200; // 左モーターの初期速度は 200
byte speeds_R = 200; // 右モーターの初期速度は 200
String speeds_l, speeds_r; // PWM の文字列を受信して整数の PWM 値に変換する
void setup()
{
Serial.begin(9600);
pinMode(ML_Ctrl, OUTPUT);
pinMode(ML_PWM, OUTPUT);
pinMode(MR_Ctrl, OUTPUT);
pinMode(MR_PWM, OUTPUT);
pinMode(SCL_Pin, OUTPUT);
pinMode(SDA_Pin, OUTPUT);
matrix_display(clear); // 画面をクリア
matrix_display(start01); // スタート画像を表示
}
void loop()
{
if (Serial.available() > 0)
{
ble_val = Serial.read();
Serial.println(ble_val);
switch (ble_val)
{
case 'F': // 前進コマンド
Car_front();
break;
case 'B': // 後退コマンド
Car_back();
break;
case 'L': // 左折コマンド
Car_left();
break;
case 'R': // 右折コマンド
Car_right();
break;
case 'S': // 停止コマンド
Car_Stop();
break;
case 'u': // u で始まり # で終わる文字列を受信し、整数値に変換する
speeds_l = Serial.readStringUntil('#');
speeds_L = String(speeds_l).toInt();
break;
case 'v': // v で始まり # で終わる文字列を受信し、整数値に変換する
speeds_r = Serial.readStringUntil('#');
speeds_R = String(speeds_r).toInt();
break;
}
}
}
/***************モーターを動かす関数***************/
void Car_back()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, speeds_R);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, speeds_L);
matrix_display(back); // 後退
}
void Car_front()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 255 - speeds_R);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 255 - speeds_L);
matrix_display(front); // 前進画像を表示
}
void Car_left()
{
digitalWrite(MR_Ctrl, HIGH);
analogWrite(MR_PWM, 255 - speeds_R);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, speeds_L);
matrix_display(left); // 左折画像を表示
}
void Car_right()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, speeds_R);
digitalWrite(ML_Ctrl, HIGH);
analogWrite(ML_PWM, 255 - speeds_L);
matrix_display(right); // 右折画像を表示
}
void Car_Stop()
{
digitalWrite(MR_Ctrl, LOW);
analogWrite(MR_PWM, 0);
digitalWrite(ML_Ctrl, LOW);
analogWrite(ML_PWM, 0);
matrix_display(STOP01); // 停止画像を表示
}
// ドットマトリクス画面表示に使用する関数
void matrix_display(unsigned char matrix_value[])
{
IIC_start(); // データ転送開始条件を呼び出す関数
IIC_send(0xc0); // アドレスを選択
for (int i = 0; i < 16; i++) // パターンデータは 16 バイト
{
IIC_send(matrix_value[i]); // パターンデータを転送
}
IIC_end(); // パターンデータ転送を終了
IIC_start();
IIC_send(0x8A); // 表示制御、パルス幅を 4/16 に選択
IIC_end();
}
// データ転送開始の条件
void IIC_start()
{
digitalWrite(SDA_Pin, HIGH);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW);
}
// データ転送終了のサイン
void IIC_end()
{
digitalWrite(SCL_Pin, LOW);
digitalWrite(SDA_Pin, LOW);
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH);
delayMicroseconds(3);
digitalWrite(SDA_Pin, HIGH);
delayMicroseconds(3);
}
// データを転送する
void IIC_send(unsigned char send_data)
{
for (byte mask = 0x01; mask != 0; mask <<= 1) // 各文字は 8 桁あり、1 つずつ検出される
{
if (send_data & mask) // 各ビット(0 または 1)に応じてハイまたはローレベルを設定
{
digitalWrite(SDA_Pin, HIGH);
}
else
{
digitalWrite(SDA_Pin, LOW);
}
delayMicroseconds(3);
digitalWrite(SCL_Pin, HIGH); // クロックピン SCL_Pin をハイにしてデータ転送を停止
delayMicroseconds(3);
digitalWrite(SCL_Pin, LOW); // クロックピン SCL_Pin をローにして SDA の信号を変化させる
}
}
(5)テスト結果:
テストコードのアップロードが完了したら、DIP スイッチを右端に切り替えて電源を入れ、APP と Bluetooth をペアリングすると、APP でスマートカーの動きを制御できます。また、左右のモーターのスピードダイヤルを引くことでカーの速度を調整できます。

(プロジェクト 17 の機能一覧表を参照してください)