Project 1 Hello XGO
Ⅰ. Teaching Aims
Verify whether the communication between MicroBlocks and XGO-lite is normal and complete the power-on initialization.
Recognize and be able to use the three most basic “system blocks”.
Be able to invoke 1 ~ N built-in actions and insert appropriate waiting times based on their duration.
Understand the role of
XGO reset posein the “posture baseline” to pave the way for follow-up experiments.
Ⅱ. Pre-class Check
XGO + Foxbit + MicroBlocks IDE.
XGO battery power ≥ 60 %.
MicroBlocks status bar shows a green dot, and the development board model is Foxbit.
In Library → Robot, tick XGO-lite. If there are no XGO blocks, please restart the software or reload the extension.
Ⅲ. Key Blocks Analysis
|
|
|---|---|
Functions |
|
Fallible points |
Forgot to put the script at beginning → The program will not work |
|
|
Functions |
|
Fallible points |
It will report I2C busy after two consecutive calls |
|
|
Functions |
|
Fallible points |
Missing this step leads to overlapping movements and an imbalance in posture |
|
|
Functions |
|
Fallible points |
The capitalization should be consistent with that in the drop-down box |




Ⅳ. Practice
Open a blank script in the workspace.
Drag in and assemble the following blocks:
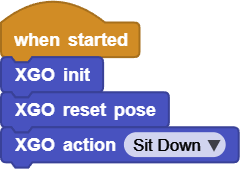
Click on the green ▶ above the workspace, and the XGO will sit down slowly.
Online code: Click here
Ⅴ. Test 1: A Single “Sit Down → Stand Up” Loop
Objective: Perform “Stand Up → Sit Down → Stand Up”.
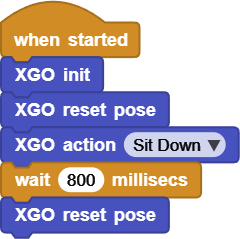
The waiting time (waitMillis) can be fine-tuned by 600 ~ 1200 ms according to the actual speed of the servo.
Online code: Click here
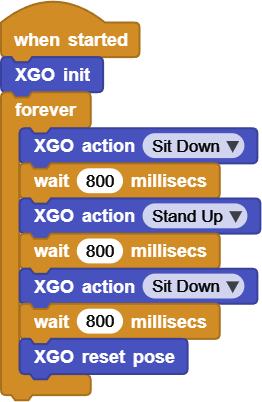
Ⅵ. Test 2: “Sit Down - Stand Up - Sit Down” Loop
Based on test 1, we put on a forever loop and add one more “Sit Down and Stand Up”.
Online code: Click here
The end XGO reset pose prevents the servo from overheating due to prolonged bending.
Ⅶ. Quiz
Why is it recommended to put
XGO initin the first sentence of almost all scripts?What phenomenon will occur if
waitMillisis omitted and the next action is executed immediately after?Both
XGO reset poseandStand Upcan make robots stand upright. What is the essential difference between them?
Ⅷ. FAQ
Questions |
Possible causes |
Solutions |
|---|---|---|
No action was responded, |
Forgot |
Plug in the wire again, |
Got stuck during the movement |
Low battery / The servo is |
Charge until the battery power is ≥ 60%, |
Cannot stand steadily after sitting down |
Forgot |
Add a reset action at the end |
“I²C busy” pops up |
The old script is still running |
First press “Stop”, |