Project 5 Domineering XGO
Ⅰ. Teaching Aims
Master the positive and negative directions of the
XGO walk sideways step size: positive for shift right, negative for shift left.Understand the influence of lateral step size on displacement distance and thigh swing.
Write the basic side-shift script of “left shift - stop - right shift - stop”, and achieve the target shift by adjusting the waiting time.
Use
XGO reset poseand small step to correct yaw to ensure a straight lateral step.
Ⅱ. Pre-class Check
XGO + Foxbit + MicroBlocks IDE.
XGO battery power ≥ 60 %. The desktop width ≥ 80 cm, with no obstructions on either side. Place soft pads at the end of the path to prevent collisions.
MicroBlocks status bar shows a green dot, XGO-lite extension is loaded and the development board model is Foxbit.
Test
XGO initandXGO reset pose.Click
XGO reset poseonce to maintain the standing position horizontally.
Ⅲ. Key Blocks Analysis
|
|
|---|---|
Value range |
Positive → right shift, negative → left shift |
Function |
Set the lateral step size and keep it in effect |
Common misuses |
Excessive step size → slipping or rollover |
|
|
Value range |
≥ 300 ms |
Function |
Maintain the current gait |
Common misuses |
Too small → Only shake without displacement |
|
|
Function |
Clear the accumulated errors |
Common misuses |
Forget to use → Yaw in long-distance lateral step |



Ⅳ. Test: Basic Shift Script
Initialization:
when started → XGO init → XGO reset posePiece the entire script according to the picture:
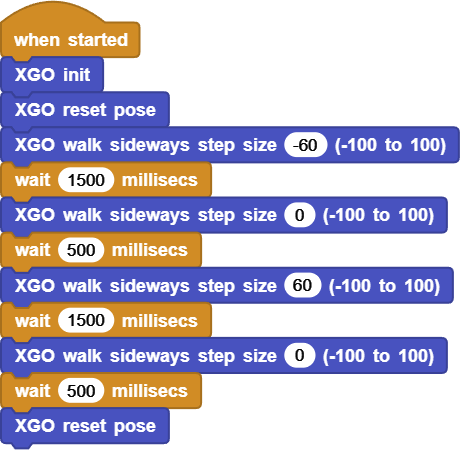
Click ▶Run, and the dog will move left for 1.5s → stop for 0.5s → move right for 1.5s → stop for 0.5s, and then it ends with
reset pose.
Online code: Click here
Ⅴ. Quiz
Why are lateral steps more sensitive to changes in waiting time?
If its nose gradually leans forward during the left-shift, how should the script be corrected?
How can lateral steps and forward steps be combined into an “L-shaped” path?
Ⅵ. FAQ
Questions |
Possible causes |
Solutions |
|---|---|---|
Shake but stay in the place |
The step size is too small or the waiting time is too short |
step size ≥ 20, waiting time ≥ 600 ms |
Obviously slippery |
The step size is 100 and the ground is slippery |
step size ≤ 70; Lay rough pads |
The body rotates in lateral steps |
Uneven friction / missed reset |
Insert |
Continue gliding after stopping |
Insufficient waiting time |
Gradually reduce the step size to 0 before stopping |
Overheating servo |
Long time of large step size |
Take a one-minute break every 30 seconds; Set a medium step size |