Projekt 12 Servo
1. Beschreibung
Dieser Servo zeichnet sich durch hohe Leistung und hohe Präzision mit einem maximalen Drehwinkel von 180° aus. Mit einem Gewicht von nur 9g ist er perfekt geeignet für jede Mini-Anwendung in verschiedenen Einsatzbereichen. Darüber hinaus verfügt er über eine kurze Anlaufzeit, geringe Geräuschentwicklung und hohe Stabilität.
2. Funktionsprinzip
Winkelbereich: 180° (360°, 180° und 90°)
Betriebsspannung: 3,3V oder 5V
Pin: Drei Drähte
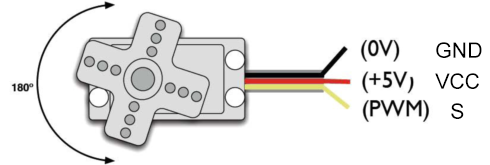
GND: Masse (braun)
VCC: Ein roter Pin, der mit +5V (3,3V) verbunden wird
S: Ein oranger Signalleiter, der über PWM-Signal gesteuert wird
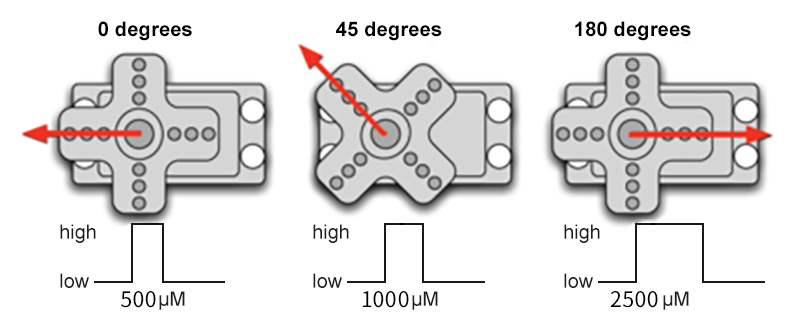
Steuerprinzip: Der Drehwinkel wird über das Tastverhältnis des PWM-Signals gesteuert. Theoretisch beträgt der Standard-PWM-Zyklus 20ms (50Hz), daher sollte die Pulsbreite im Bereich von 1ms bis 2ms liegen. Tatsächlich reicht die Pulsbreite jedoch von 0,5ms bis 2,5ms, was einem Winkel von 0° bis 180° entspricht. Beachten Sie, dass bei gleichem Signal der Drehwinkel je nach Servo-Hersteller variieren kann.
3. Schaltplan
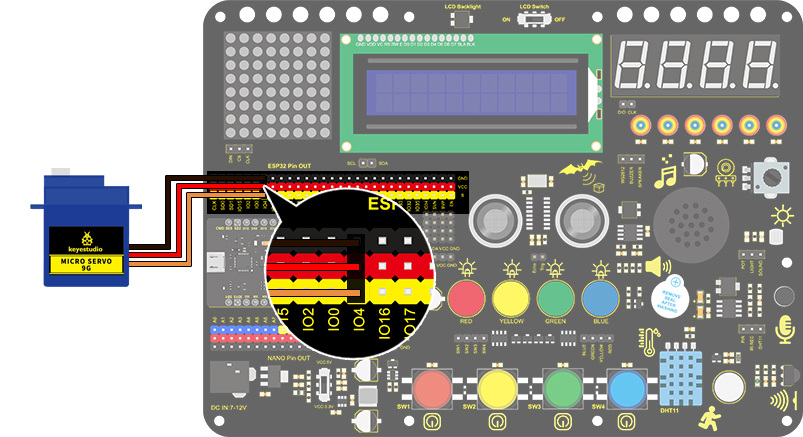
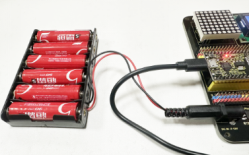
Verwenden Sie eine externe Stromquelle anstelle der reinen USB-Stromversorgung.
4. Testcode
int servoPin = 4;//servo PIN
void setup()
{
pinMode(servoPin, OUTPUT);//servo pin is set to output
}
void loop()
{
for(int i = 0 ; i <= 180 ; i++)
{
servopulse(servoPin, i);//Set the servo to rotate from 0° to 180°
delay(10);//delay 10ms
}
for(int i = 180 ; i >= 0 ; i--)
{
servopulse(servoPin, i);//Set the servo to rotate from 180° to 0°
delay(10);//delay 10ms
}
}
void servopulse(int pin, int myangle)
{ //Impulse function
int pulsewidth = map(myangle, 0, 180, 500, 2500); //Map Angle to pulse width
for (int i = 0; i < 10; i++)
{ //Output a few more pulses
digitalWrite(pin, HIGH);//Set the servo interface level to high
delayMicroseconds(pulsewidth);//The number of microseconds of delayed pulse width value
digitalWrite(pin, LOW);//Lower the level of servo interface
}
}
5. Testergebnis
Nach dem Anschließen der Verkabelung und Hochladen des Codes beginnt der Servo, sich von 0° bis 180° zu drehen und anschließend in die entgegengesetzte Richtung.