Project 27 Intelligent Parking
1. Beschrijving
Dit intelligente parkeersysteem detecteert en optimaliseert de parkeerpositie via een ultrasone sensor. Met dit systeem wordt foutparkeren in grote mate voorkomen.
Allereerst moet je de sensor rondom de parkeerplaats installeren. Vervolgens detecteert het de afstand tussen de auto en de randen en stuurt deze informatie naar de ontwikkelkaart om de auto automatisch naar de optimale parkeerpositie te laten aanpassen.
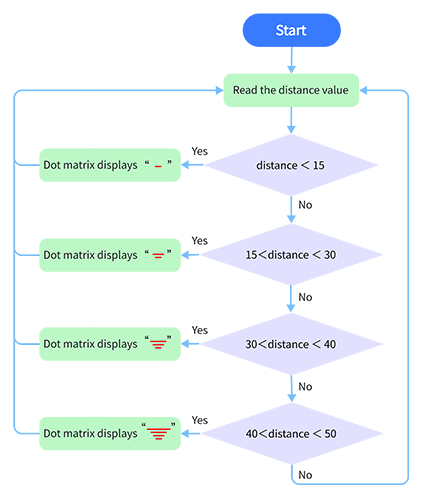
2. Stroomschema
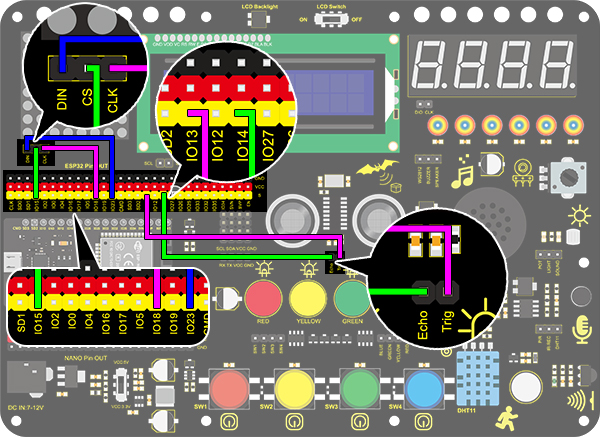
3. Aansluitschema
4. Testcode
/*
keyestudio ESP32 Inventor Learning Kit
Project 27 Intelligent Parking
http://www.keyestudio.com
*/
#include <LedControl.h>
int DIN = 23; //Define DIN pin to IO23
int CS = 15; //Define CS pin to IO15
int CLK = 18; //Define CLK pin to IO18
int temp = 0;
int distance = 0; //Define a variable to receive the distance
int EchoPin = 14; //Connect Echo pin to IO14
int TrigPin = 13; //Connect Trig pin to IO13
float checkdistance() { //Acquire distance
// preserve a short low level to ensure a clear high pulse:
digitalWrite(TrigPin, LOW);
delayMicroseconds(2);
// Trigger the sensor by a high pulse of 10um or longer
digitalWrite(TrigPin, HIGH);
delayMicroseconds(10);
digitalWrite(TrigPin, LOW);
// Read the signal from the sensor: a high level pulse
//Duration is detected from the point sending "ping" command to the time receiving echo signal (unit: um).
float distance = pulseIn(EchoPin, HIGH) / 58.00; //Convert into distance
delay(10);
return distance;
}
LedControl lc = LedControl(DIN, CLK, CS, 4);
byte data_val[4][8] =
{
{ 0x00, 0x00, 0x00, 0x01, 0x01, 0x00, 0x00, 0x00 },
{ 0x00, 0x00, 0x04, 0x05, 0x05, 0x04, 0x00, 0x00 },
{ 0x00, 0x10, 0x14, 0x15, 0x15, 0x14, 0x10, 0x00 },
{ 0x40, 0x50, 0x54, 0x55, 0x55, 0x54, 0x50, 0x40 },
};
void setup()
{
lc.shutdown(0, false); //MAX72XX is in power-saving mode at startup
lc.setIntensity(0, 8); //Set the brightness to its maximum value
lc.clearDisplay(0); //Clear display
pinMode(TrigPin, OUTPUT); //Set Trig pin to output
pinMode(EchoPin, INPUT); //Set Echo pin to input
Serial.begin(9600);
}
void loop()
{
distance = checkdistance();
Serial.println(distance);
if (distance < 15)
{
temp = 0;
}
else if (distance < 30 && distance > 15)
{
temp = 1;
}
else if (distance < 40 && distance > 30)
{
temp = 2;
}
else if (distance > 50)
{
temp = 3;
}
for (int i = 0; i < 8; i++)
{
lc.setRow(0, i, data_val[temp][i]);
}
}
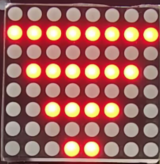
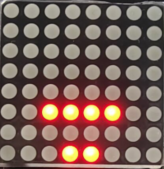
5. Testresultaat
Na het aansluiten van de bedrading en het uploaden van de code, worden lijnen weergegeven op de dotmatrix. Als de gedetecteerde afstand minder is dan 50 cm, zijn er minder lijnen zichtbaar.