Project 28 Intelligente Poort
1. Beschrijving
De intelligente poort is een intelligent parkeersysteem dat een MCU en ultrasone sensor integreert, welke automatisch de poort bestuurt op basis van de afstand van auto’s, om zo de toegang van auto’s beter te regelen.
Wanneer een bepaalde afstand wordt bereikt, ontvangt de MCU het signaal van de sensor en schat de afstand via de signaalsterkte. Als de auto nadert of vertrekt, zal de MCU de poort openen of sluiten via een servo.
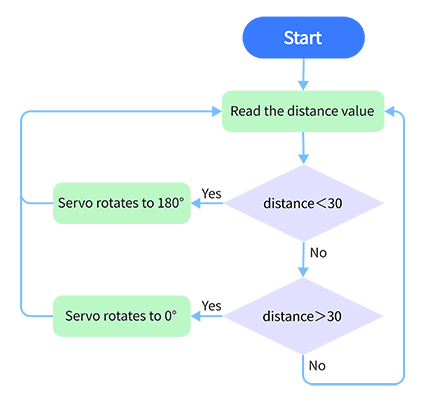
2. Stroomschema
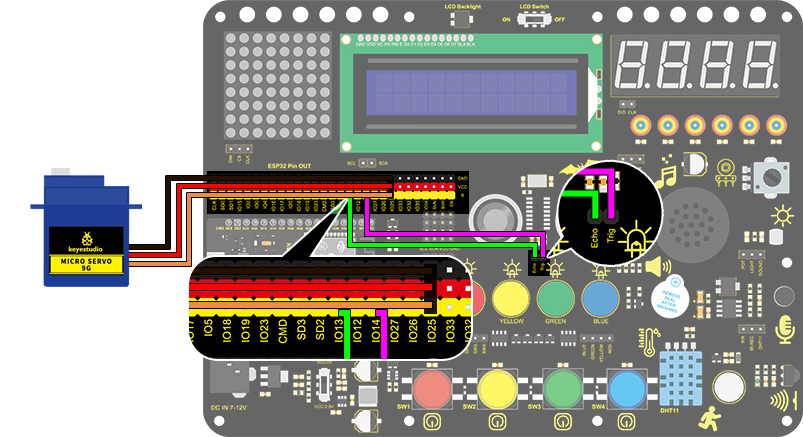
3. Aansluitschema
4. Testcode
/*
keyestudio ESP32 Inventor Learning Kit
Project 28 Intelligent Gate
http://www.keyestudio.com
*/
#define servo_pin 25
int distance = 0; //Define a variable to receive the distance
int EchoPin = 14; //Connect Echo pin to IO14
int TrigPin = 13; //Connect Trig pin to IO13
//Ultrasonic ranging program
float checkdistance() { //Acquire distance
//preserve a short low level to ensure a clear high pulse:
digitalWrite(TrigPin, LOW);
delayMicroseconds(2);
//Trigger the sensor by a high pulse of 10um or longer
digitalWrite(TrigPin, HIGH);
delayMicroseconds(10);
digitalWrite(TrigPin, LOW);
//Read the signal from the sensor: a high level pulse
//Duration is detected from the point sending "ping" command to the time receiving echo signal (unit: um).
float distance = pulseIn(EchoPin, HIGH) / 58.00; //Convert into distance
delay(10);
return distance;
}
//Servo rotation program
void Set_Angle(int angle_val) //Impulse function
{
int pulsewidth = map(angle_val, 0, 180, 500, 2500); //Map Angle to pulse width
for (int i = 0; i < 10; i++) { //Output a few more pulses
digitalWrite(servo_pin, HIGH);//Set the servo interface level to high
delayMicroseconds(pulsewidth);//The number of microseconds of delayed pulse width value
digitalWrite(servo_pin, LOW);//Lower the level of servo interface
delay(20 - pulsewidth / 1000); //Add the bracket
}
}
void setup()
{
// put your setup code here, to run once:
pinMode(servo_pin,OUTPUT);
pinMode(TrigPin, OUTPUT);//Set Trig pin to output
pinMode(EchoPin, INPUT); //Set Echo pin to input
}
void loop()
{
// put your main code here, to run repeatedly:
distance = checkdistance();
Serial.println();
if(distance < 30)
{
Set_Angle(180);
delay(5000);//Wait for 5s
}
if(distance > 30)
{
Set_Angle(0);
}
}
5. Testresultaat
Na het aansluiten van de bedrading en het uploaden van de code zal de servo 180° draaien gedurende 5 seconden als de gedetecteerde afstand minder is dan 30 cm. Anders zal de servo naar 0° draaien.