Project 30 Slimme Woning
1. Beschrijving
In dit technologische tijdperk zijn we allemaal vertrouwd met slimme woningen. Het is een systeem dat elektrische apparaten kan bedienen via knoppen.
In dit project willen we een slimme woning simuleren via een IR-afstandsbediening. Met Arduino MCU als kern kan het worden gebruikt om licht, airconditioners, TV en beveiligingsmonitoren te bedienen.
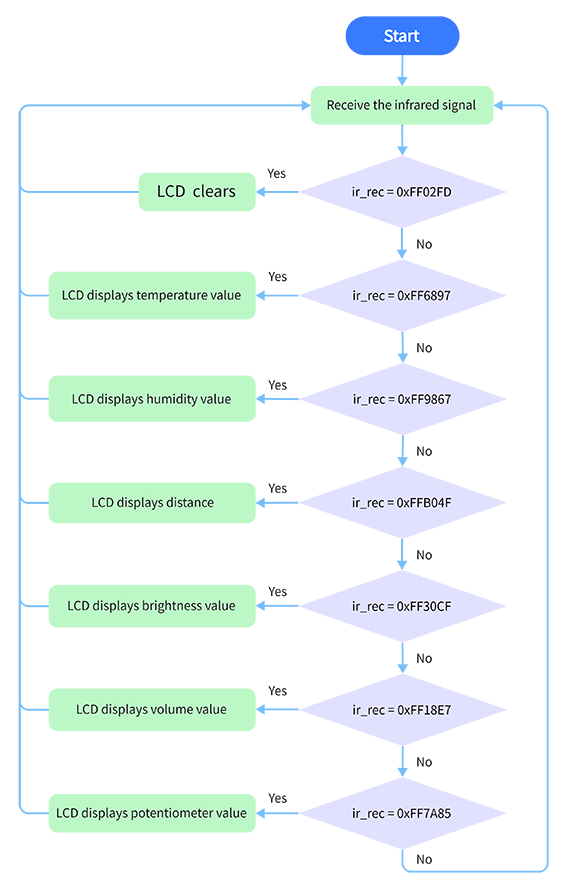
2. Stroomschema
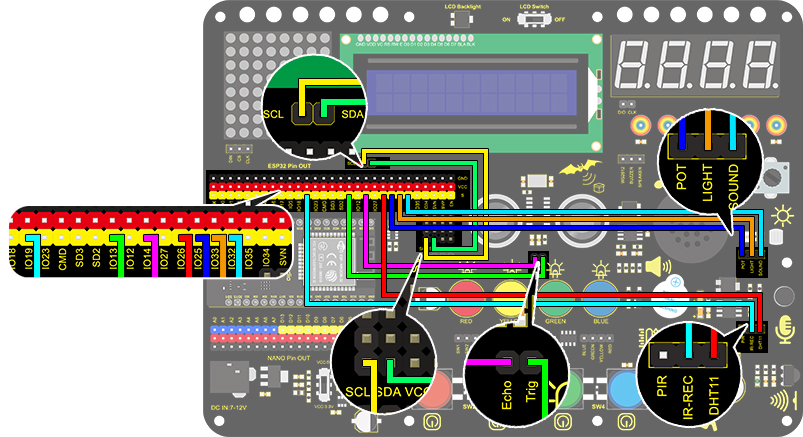
3. Aansluitschema
4. Testcode
/*
keyestudio ESP32 Inventor Learning Kit
Project 30 Smart Home
http://www.keyestudio.com
*/
#include <LiquidCrystal_I2C.h>
#include <IRremoteESP8266.h>
#include <IRrecv.h>
#include <IRutils.h>
#include <xht11.h>
LiquidCrystal_I2C lcd(0x27, 16, 2); // set the LCD address to 0x27 for a 16 chars and 2 line display
const uint16_t recvPin = 19; // Infrared receiving pin
IRrecv irrecv(recvPin); // Create a class object used to receive class
decode_results results; // Create a decoding results class object
long ir_rec;
xht11 xht(26); //The DHT11 connects to IO26
unsigned char dat[] = { 0, 0, 0, 0 }; //Define an array to store temperature and humidity data
int distance = 0; //Define a variable to receive the distance
int EchoPin = 14; //Connect Echo pin to IO14
int TrigPin = 13; //Connect Trig pin to IO13
int ligth_sensor = 33; //Define the photoresistor pin
int sound_sensor = 32; //efine the sound sensor pin
int pot_sensor = 25; //Define the potentiometer pin
void setup() {
//LCD 1602
lcd.init(); // initialize the lcd
lcd.backlight(); //Turn on the LCD backlight
lcd.setCursor(3, 0);
lcd.print("keyestudio"); //LCD displays "keyestudio"
//IR receiver
irrecv.enableIRIn(); // start receiving signals
//Ultrasonic
pinMode(TrigPin, OUTPUT); //Set Trig pin to output
pinMode(EchoPin, INPUT); //Set Echo pin to input
}
void loop() {
if (irrecv.decode(&results)) {
if (results.value != 0) { //Prevent the button from being pressed repeatedly
ir_rec = results.value; //The signal is assigned to the variable ir_rec
show_clear();
}
irrecv.resume(); //Release the IRremote and receive the next value.
}
switch (ir_rec) {
case 0xFF02FD: show_clear(); break;
case 0xFF6897: show_temperature(); break;
case 0xFF9867: show_humidity(); break;
case 0xFFB04F: show_distance(); break;
case 0xFF30CF: show_luminance(); break;
case 0xFF18E7: show_sound(); break;
case 0xFF7A85: show_pot(); break;
}
delay(300);
}
void show_clear() { //Clear display
lcd.setCursor(0, 1);
lcd.print(" ");
}
void show_temperature() { //Display temperature
if (xht.receive(dat)) { //Check correct return to true
lcd.setCursor(0, 1);
lcd.print("Temperature:");
lcd.setCursor(13, 1);
lcd.print(dat[2]);
if (dat[2] < 100) {
lcd.setCursor(15, 1);
lcd.print(" ");
}
}
}
void show_humidity() { //Display humidity
if (xht.receive(dat)) { //Check correct return to true
lcd.setCursor(0, 1);
lcd.print("Humidity:");
lcd.setCursor(10, 1);
lcd.print(dat[0]);
Serial.println("2");
if (dat[0] < 100) {
lcd.setCursor(12, 1);
lcd.print(" ");
}
}
}
float checkdistance() { //Acquire distance
// preserve a short low level to ensure a clear high pulse:
digitalWrite(TrigPin, LOW);
delayMicroseconds(2);
// Trigger the sensor by a high pulse of 10um or longer
digitalWrite(TrigPin, HIGH);
delayMicroseconds(10);
digitalWrite(TrigPin, LOW);
// Read the signal from the sensor: a high level pulse
//Duration is detected from the point sending "ping" command to the time receiving echo signal (unit: um).
float distance = pulseIn(EchoPin, HIGH) / 58.00; //Convert into distance
delay(10);
return distance;
}
void show_distance() { //Display the distance
distance = checkdistance();
// if (distance < 2 || distance >= 400) { //Disolay "-1" if exceeding the detection range
// distance = -1;
// }
lcd.setCursor(0, 1);
lcd.print("distance:");
lcd.setCursor(9, 1);
lcd.print(distance);
if (distance < 100 && distance > 10) { //Eliminate the third residual digit when the value drops to two digits
lcd.setCursor(11, 1);
lcd.print(" ");
}
if (distance < 10) { //Eliminate the second residual digit when the value drops to one digit
lcd.setCursor(10, 1);
lcd.print(" ");
}
}
void show_luminance() //Read the analog value of photoresistor
{
int value = analogRead(ligth_sensor);
lcd.setCursor(0, 1);
lcd.print("Luminance:");
lcd.setCursor(11, 1);
lcd.print(value);
if (value < 1000)
{
lcd.setCursor(14, 1);
lcd.print(" ");
}
if (value < 100)
{
lcd.setCursor(13, 1);
lcd.print(" ");
}
if (value < 10)
{
lcd.setCursor(12, 1);
lcd.print(" ");
}
}
void show_sound() //Read the analog sound value
{
int value = analogRead(sound_sensor);
lcd.setCursor(0, 1);
lcd.print("Sound:");
lcd.setCursor(7, 1);
lcd.print(value);
if (value < 1000)
{
lcd.setCursor(10, 1);
lcd.print(" ");
}
if (value < 100)
{
lcd.setCursor(9, 1);
lcd.print(" ");
}
if (value < 10)
{
lcd.setCursor(8, 1);
lcd.print(" ");
}
}
void show_pot() //Read the analog value of potentiometer
{
int value = analogRead(pot_sensor);
lcd.setCursor(0, 1);
lcd.print("PotAnalog:");
lcd.setCursor(11, 1);
lcd.print(value);
if (value < 1000)
{
lcd.setCursor(14, 1);
lcd.print(" ");
}
if (value < 100)
{
lcd.setCursor(13, 1);
lcd.print(" ");
}
if (value < 10)
{
lcd.setCursor(12, 1);
lcd.print(" ");
}
}
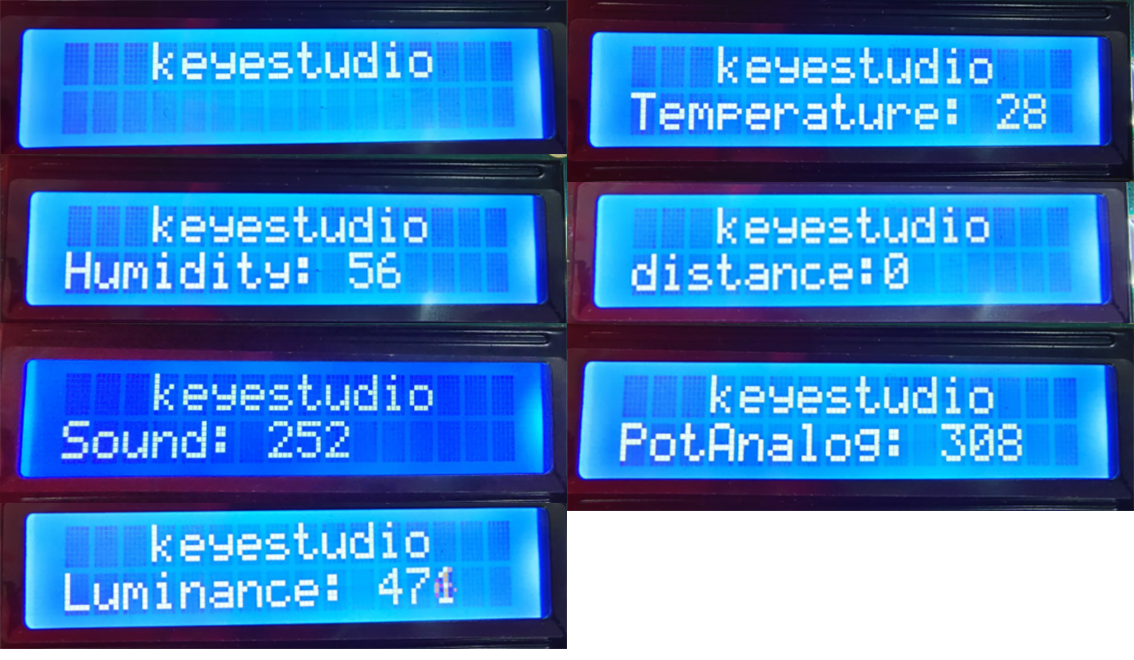
5. Testresultaat
Na het aansluiten van de bedrading en het uploaden van de code, kunnen we de overeenkomstige inhoud op het LCD zien door op knoppen te drukken. De OK-knop wist het sensorweergave.