5.6 スマート給餌システム
5.6.1 給餌室のドア
Arduino IDEで5.6.1Servoコードを開きます。
#include <ESP32Servo.h> //Import the library of servo
Servo myservo; // create servo object to control a servo
// 16 servo objects can be created on the ESP32
int pos = 0; // variable to store the servo position
// Recommended PWM GPIO pins on the ESP32 include 2,4,12-19,21-23,25-27,32-33
int servoPin = 26;
void setup() {
Serial.begin(9600);
myservo.attach(servoPin); // attaches the servo on pin 26 to the servo object
myservo.write(180);
delay(2000);
}
void loop() {
for (pos = 80; pos <= 179; pos += 1) { // goes from 0 degrees to 80 degrees
// in steps of 1 degree
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
for (pos = 180; pos >= 81; pos -= 1) { // goes from 80 degrees to 0 degrees
myservo.write(pos); // tell servo to go to position in variable 'pos'
delay(15); // waits 15ms for the servo to reach the position
}
}
ESP32 Dev ModuleボードとCOMポートを選択し、コードをアップロードします。

テスト結果:
給餌室のドアがゆっくりと開き、その後閉じます。
注記: SG90サーボは180°回転できます。給餌ボックスが小さいため、100°の回転でボックスを完全に閉じるのに十分です。
80°: 全開
120°: 半開
180°: 閉
注意
指を箱に入れないでください。挟まれる危険があります!
サーボを損傷する可能性があるため、ドアを物で塞がないでください!
ドアはサーボによって制御されます。
内部構造:
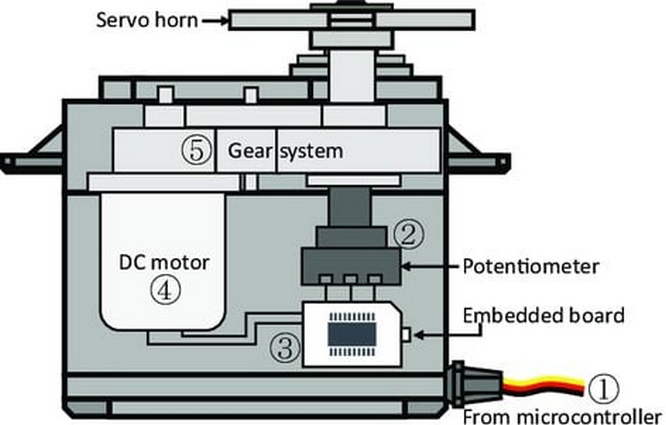
① 信号(S): マイクロコントローラからの制御信号を受信します。
② ポテンショメータ: サーボのフィードバック部分。出力軸の位置を測定します。
③ 組み込みボード(内部コントローラ): サーボのコア。外部制御信号と位置のフィードバック信号を処理し、サーボを駆動します。
④ DCモーター: 実行部分。速度、トルク、位置を出力します。
⑤ ギアシステム: モーターからの出力を、特定の伝達比に従って最終的な出力角度に調整します。
サーボの駆動:
信号(S)はPWMを受信してサーボの出力を制御し、出力軸の位置はPWMのデューティサイクルに直接依存します。
例:
A. パルス幅1.5msの信号をサーボに送ると、その軸(ホーン)は中央位置(90°)に回転します。
B. パルス幅 = 0.5msの場合、軸は最小(0°)に回転します。
C. パルス幅 = 2.5msの場合、軸は最大(180°)に回転します。
注記: 最大角度はサーボの種類によって異なります。170°のものもあれば、90°のものもあります。それにもかかわらず、サーボは通常、パルス幅1.5msの信号を受信すると、(最大角度の)半分動きます。
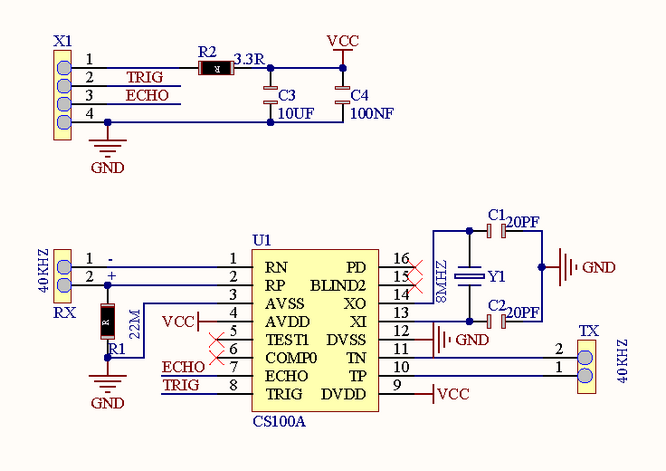
5.6.2 超音波センサー

Arduino IDEで5.6.2 Ultrasonic-Sensorコードを開きます。
#define Trigpin 12 //connect trig to io12
#define Echopin 13 //connect echo to io13
int duration,distance;
void setup(){
Serial.begin(9600); //Set the baud rate to 9600
pinMode(Trigpin,OUTPUT); //set trig pin to output mode
pinMode(Echopin,INPUT); //set echo pin to input mode
}
void loop(){
digitalWrite(Trigpin,LOW);
delayMicroseconds(2);
digitalWrite(Trigpin,HIGH);
delayMicroseconds(10); //Trigger the trig pin via a high level lasting at least 10us
digitalWrite(Trigpin,LOW);
duration = pulseIn(Echopin,HIGH); //the time of high level at echo pin
distance = duration/58; //convert into distance(cm)
delay(50);
Serial.print("distance:"); //Serial monitor prints the value
Serial.print(distance);
Serial.println("cm");
}
ESP32 Dev ModuleボードとCOMポートを選択し、コードをアップロードします。
テスト結果:
このキットでは、検出範囲は3〜8cm以内です。
シリアルモニターを開き、ボーレートを9600に設定すると、シリアルモニターに超音波モジュールと前方の障害物との距離が表示されます。
5.6.3 インテリジェント給餌システム
Arduino IDEで5.6.3Intelligent-Feeding-Systemコードを開きます。
#include <ESP32Servo.h> //Import the library of servo on ESP32 board
Servo myservo; // create servo object to control a servo
// 16 servo objects can be created on the ESP32
#define TrigPin 12 //connect trig to D12
#define EchoPin 13 //connect echo to D13
#define ServoPin 26
int duration,distance;
void setup(){
Serial.begin(9600); //Set the baud rate to 9600
pinMode(TrigPin,OUTPUT); //set trig pin to output mode
pinMode(EchoPin,INPUT); //Set echo pin to input mode
myservo.attach(ServoPin); // attaches the servo on pin 26 to the servo object
}
void loop(){
Serial.println(getDistance());
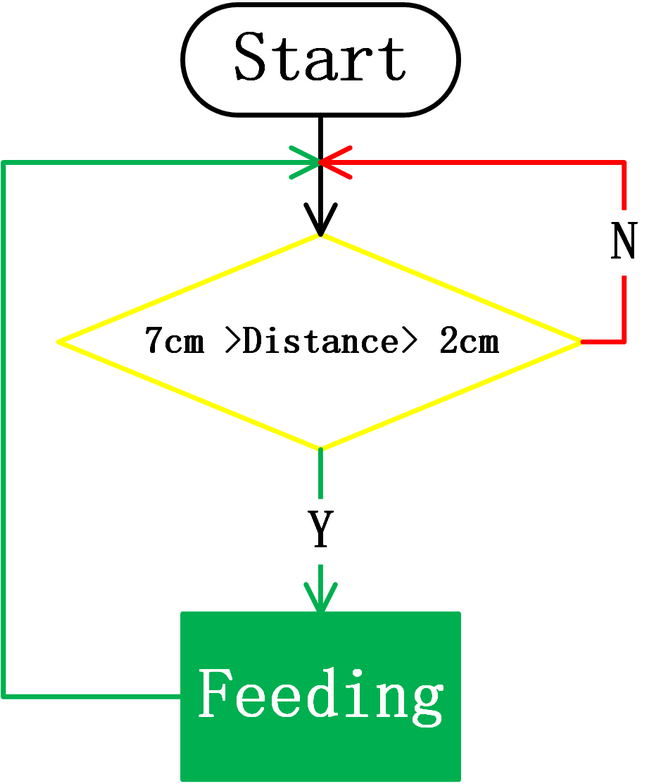
//When the distance is detected within 2~7cm, open the feeding box. Or else, close.
if (getDistance() >= 2 && 7 >= getDistance()) {
//Servo rotates to 80° to open the box
myservo.write(80);
delay(500);
}
else{
myservo.write(180);
delay(500);
}
}
//Put the gotten distance in a function
float getDistance() {
digitalWrite(TrigPin,LOW);
delayMicroseconds(2);
digitalWrite(TrigPin,HIGH);
delayMicroseconds(10); //Trigger the trig pin via a high level lasting at least 10us
digitalWrite(TrigPin,LOW);
duration = pulseIn(EchoPin,HIGH); //the time of high level at echo pin
distance = duration/58; //convert into distance(cm)
delay(50);
return distance;
}
ESP32 Dev ModuleボードとCOMポートを選択し、コードをアップロードします。
テスト結果:
スマート給餌システムは、超音波モジュールとサーボを介して家禽にインテリジェントに給餌します。前者は動物までの距離を検出し、後者は給餌ボックスの開閉を制御します。ペットがボックスに近づいていることを検出すると、サーボがボックスを開いて給餌します。
注意
指を箱に入れないでください。挟まれる危険があります!
サーボを損傷する可能性があるため、ドアを物で塞がないでください!