プロジェクト 7:Accelerometer
1. 説明
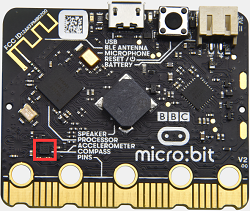
micro: bit main board V2 には、LSM303AGR 重力加速度センサー(加速度計とも呼ばれる)が内蔵されており、分解能は 8/10/12 ビットです。コード内ではレンジを 1g、2g、4g、8g に設定できます。
加速度センサーは機械の状態を検出するためによく使用します。
このプロジェクトでは、加速度センサーを使ってボードの向きを測定する方法を紹介します。その後、加速度センサーが出力する生の三軸データを確認します。
2. 準備
A. USB ケーブルで micro:bit main board をコンピュータに接続します。
B. Mu のオフライン版を開きます。
3. テストコード1
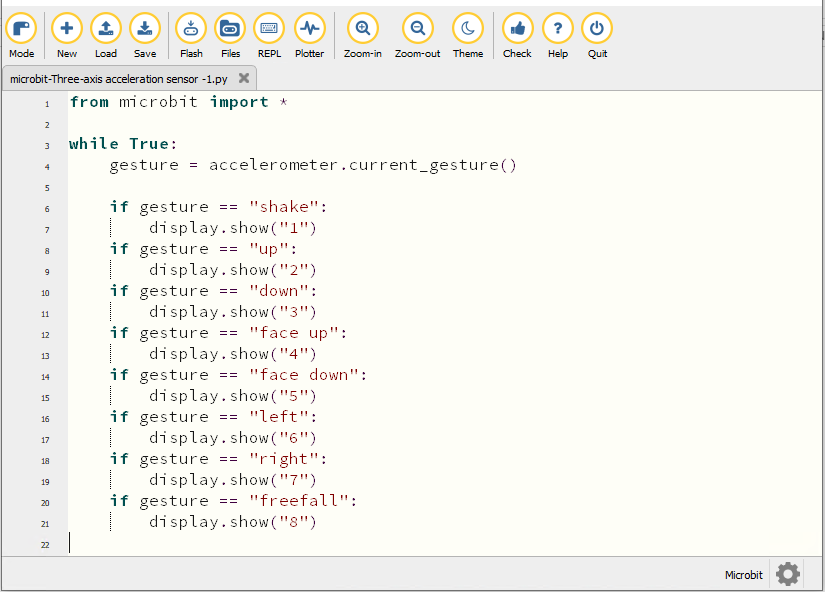
Mu ソフトを起動し、ファイル “Three-axis acceleration sensor -1.py“ を開いてコードを読み込みます。編集ウィンドウにコードを自分で入力することもできます。
(注意: すべての単語および記号は英語で記述してください。)
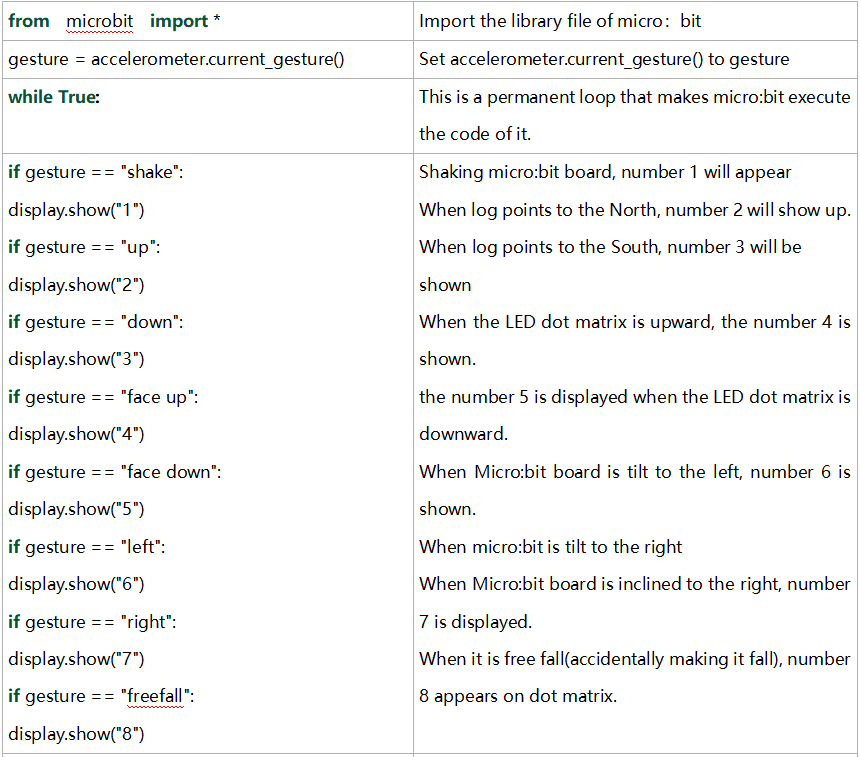
from microbit import *
while True:
gesture = accelerometer.current_gesture()
if gesture == "shake":
display.show("1")
if gesture == "up":
display.show("2")
if gesture == "down":
display.show("3")
if gesture == "face up":
display.show("4")
if gesture == "face down":
display.show("5")
if gesture == "left":
display.show("6")
if gesture == "right":
display.show("7")
if gesture == "freefall":
display.show("8")
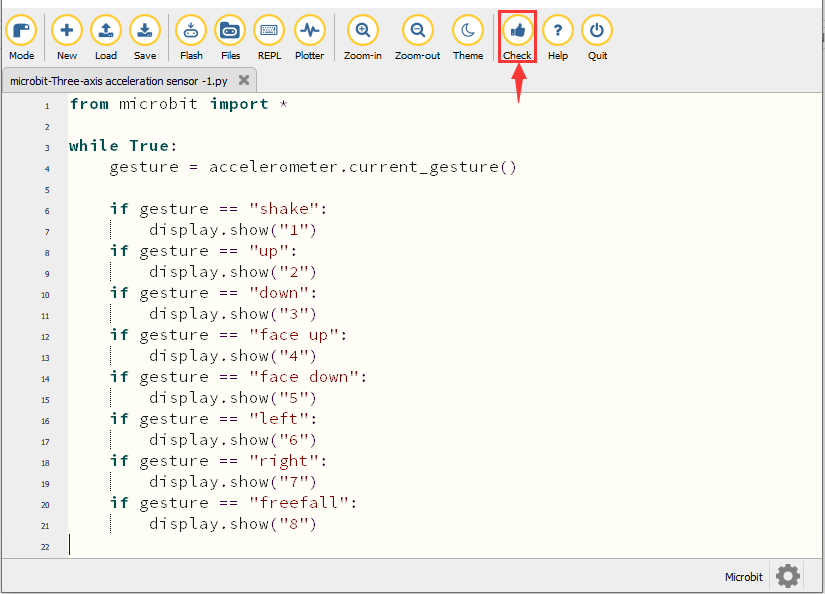
「Check」をクリックしてコードのエラーを確認します。下線やカーソルが表示される場合、プログラムは正しくありません。
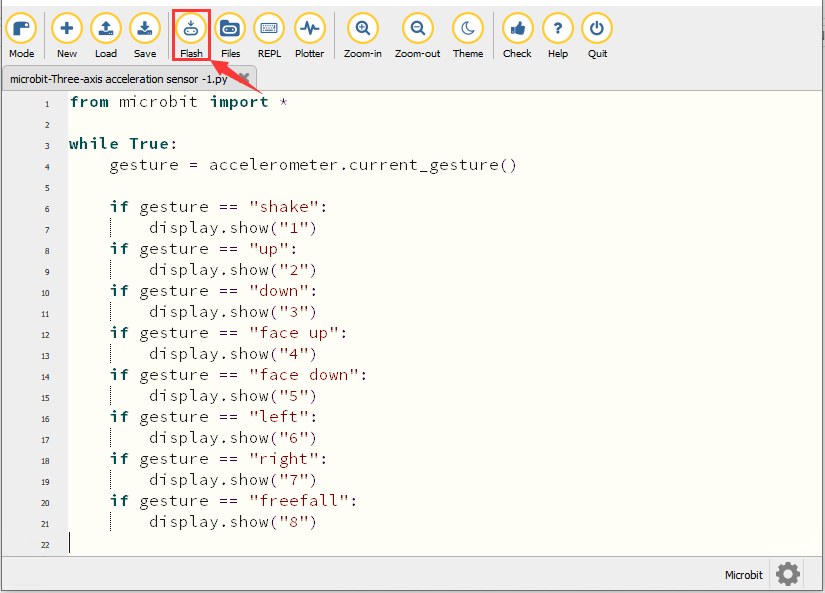
コードが正しければ、micro:bit をコンピュータに接続して「Flash」をクリックし、コードを micro:bit ボードに書き込みます。
4. テスト結果1
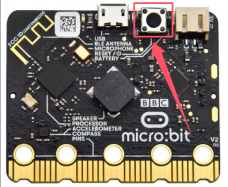
コードをボードに正常にダウンロードしたら、micro USB ケーブルまたは外部電源で給電する(DIP スイッチを ON にする)、その後 micro:bit のリセットボタンを押します。
micro: bit main board を振ると、方向に関係なく LED ドットマトリクスに数字「1」が表示されます。
ボードを立てた状態(ロゴが LED マトリクスの上に来る)では、数字 2 が表示されます。

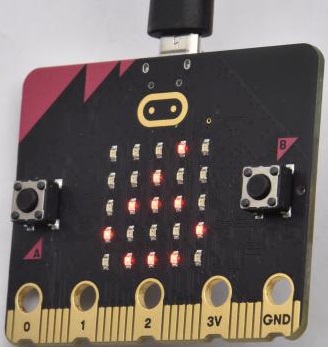
上下逆さま(ロゴが LED マトリクスの下に来る)に保持すると、下図のように表示されます。

机の上に静かに置き、表側が上を向いているときは数字 4 が表示されます。

机の上に静かに置き、裏側が上を向いているときは数字 5 が表示されます。
ボードを左に傾けると、LED ドットマトリクスに数字 6 が表示されます(下図参照)。
ボードを右に傾けると、LED ドットマトリクスに数字 7 が表示されます(下図参照):

ボードを床に叩きつけると、この動作は自由落下とみなすことができ、LED マトリクスに数字 8 が表示されます。(このテストはメインボードを損傷する可能性があるため推奨しません。)
注意:この機能を試したい場合、加速度を 3g、6g、または 8g に設定することもできます。
5. テストコード2
Mu ソフトを起動し、ファイル “Three-axis acceleration sensor -2.py“ を開いてコードを読み込みます。編集ウィンドウにコードを自分で入力することもできます。
(注意: すべての単語および記号は英語で記述してください。)
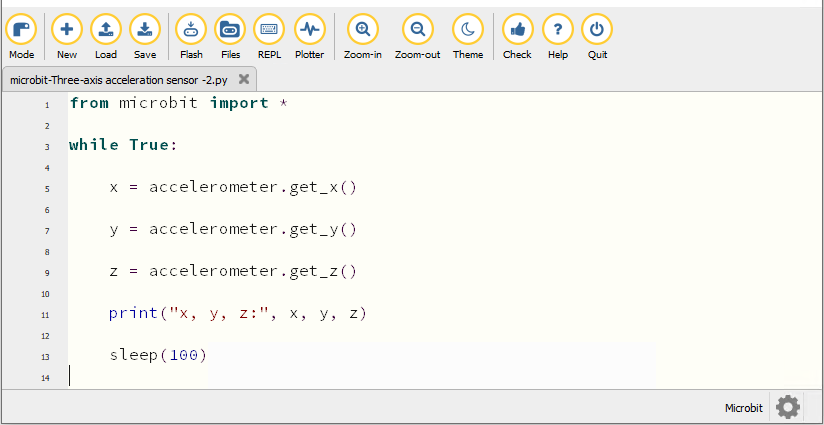
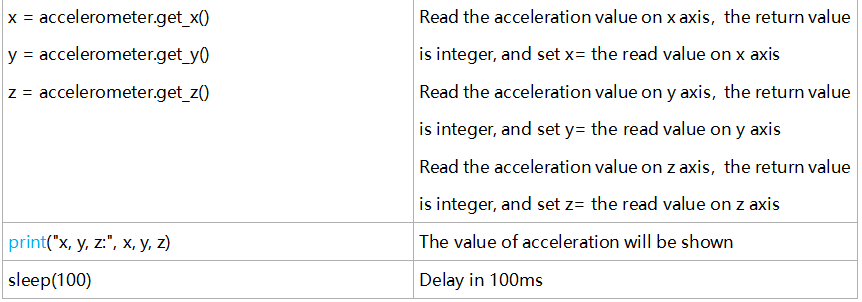
from microbit import *
while True:
x = accelerometer.get_x()
y = accelerometer.get_y()
z = accelerometer.get_z()
print("x, y, z:", x, y, z)
sleep(100)
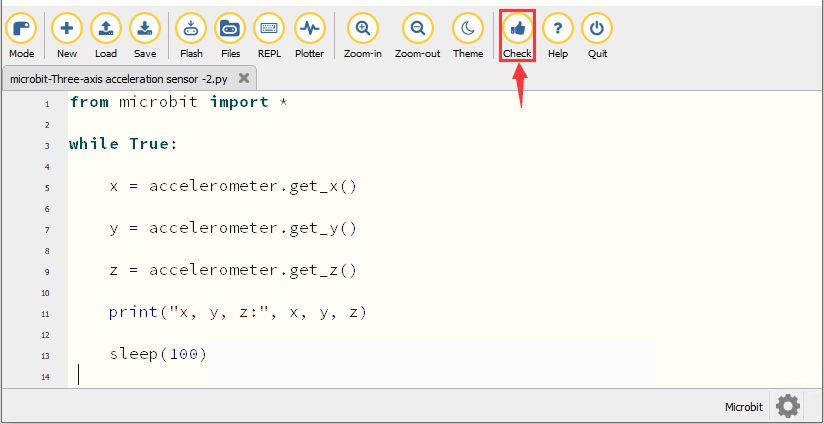
「Check」をクリックしてコードのエラーを確認します。下線やカーソルが表示される場合、プログラムは正しくありません。
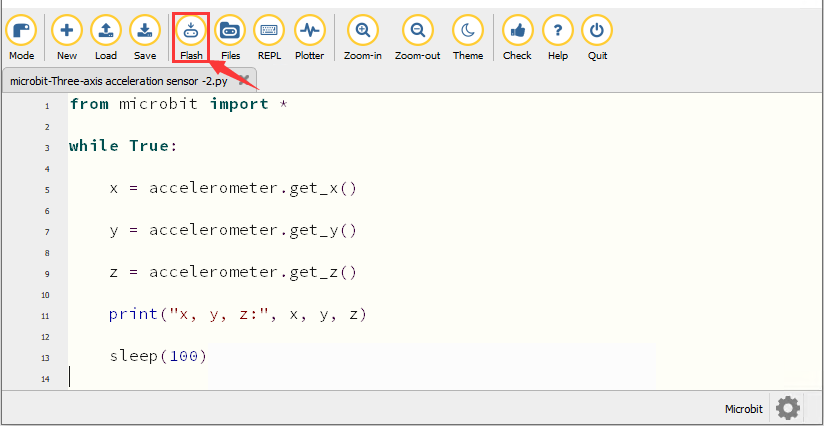
コードが正しければ、micro:bit をコンピュータに接続して「Flash」をクリックし、コードを micro:bit ボードに書き込みます。
6. テスト結果2
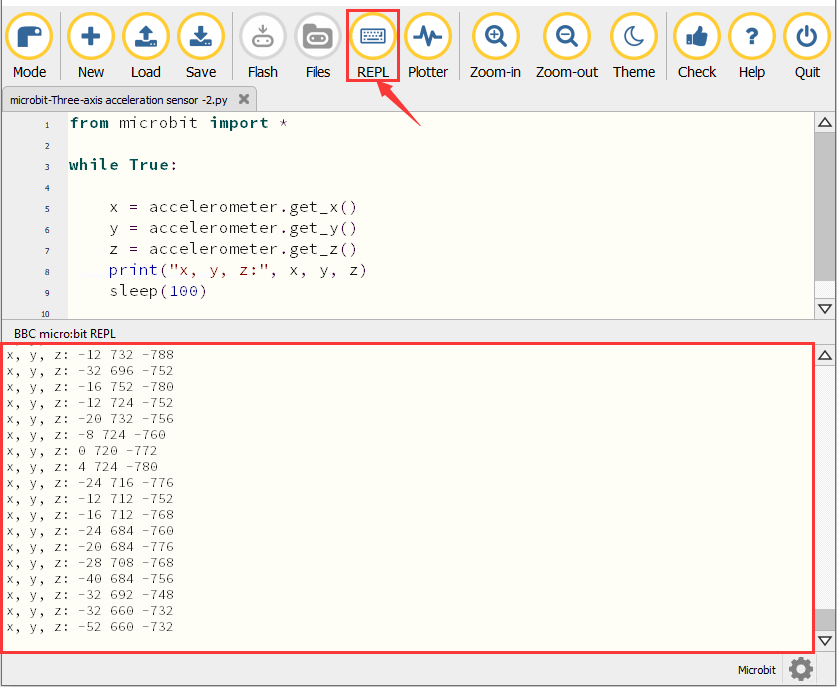
コードをボードに正常にダウンロードしたら、micro USB ケーブルまたは外部電源で給電する(DIP スイッチを ON にする)。 「REPL」をクリックし、micro:bit のリセットボタンを押します。
すると REPL ウィンドウに X 軸、Y 軸、Z 軸の加速度の値が以下のように表示されます:
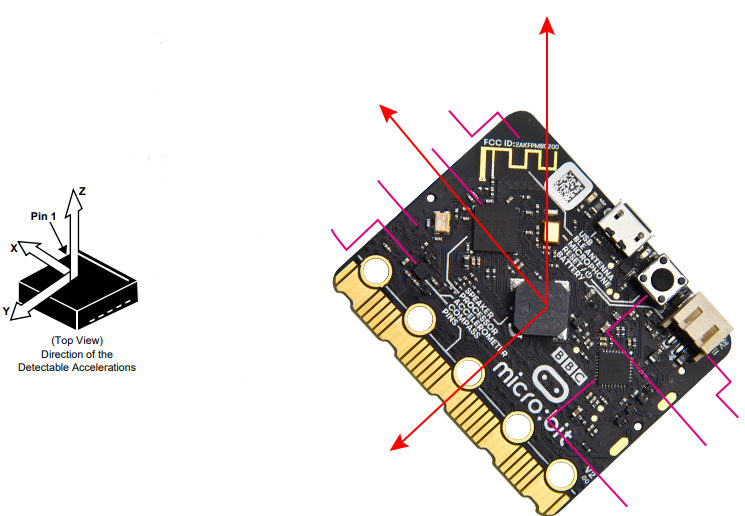
MMA8653FC のデータマニュアルおよび micro: bit main board のハードウェア回路図を参照すると、micro: bit の加速度計座標は下図のようになります:
7. コードの説明