プロジェクト 18:超音波センサー
プロジェクト 18.1:超音波距離測定
1. 説明
超音波センサーはコウモリのようにソナーを使って物体までの距離を測定します。高精度で安定した非接触距離検出を、使いやすいパッケージで提供します。送信モジュールと受信モジュールがセットになっています。
超音波センサーは障害物検知や距離測定アプリケーションをはじめ、さまざまな電子工作プロジェクトで広く使われています。
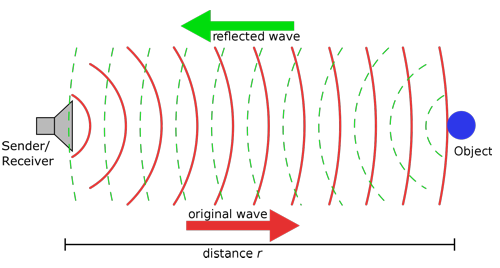
超音波モジュールはトリガー信号を受けると超音波を発信します。超音波が物体にぶつかって反射して戻ってくると、モジュールはエコー信号を出力するため、トリガー信号(TRIG)とエコー信号(ECHO)の時間差から物体までの距離を求めることができます。
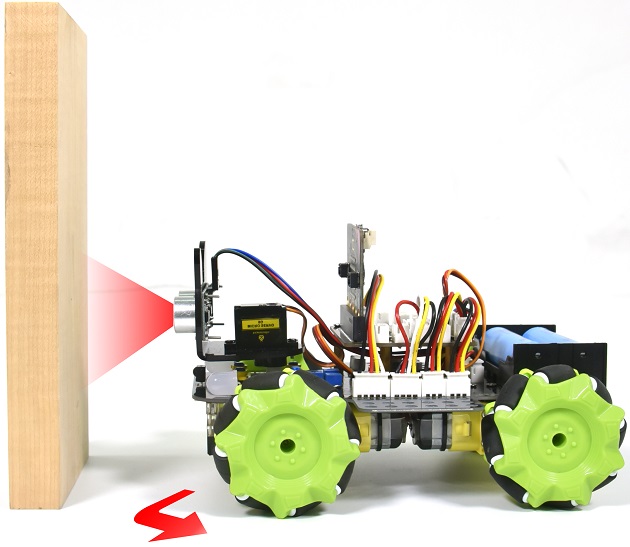
図のように、左右に二つの目のようになっており、一方が送信側、もう一方が受信側です。
上記の配線図に従い、超音波センサーモジュールの統合ポートはmicro:bit用モータードライバベースプレートの5V G P15 P16ポートに接続します。Trig(T)ピンはmicro:bitのP15で制御し、Echo(E)ピンはP16に接続します。

2. 動作原理
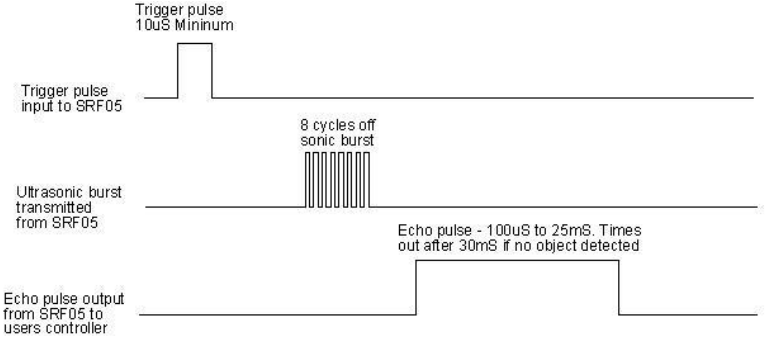
(1) TRIGをプルダウンした後、少なくとも10μsの高レベル信号でトリガーする;
(2) トリガー後、モジュールは自動的に40kHzの超音波パルスを8回送信し、信号が返ってくるかを検知する;
(3) 信号が返ってきた場合、ECHO(E)が高レベルを出力している時間が送信から受信までの時間になる。距離 = 高レベル継続時間 * 340 m/s * 0.5。
3. 仕様
動作電圧: 3-5.5V (DC)
動作電流: 15mA
動作周波数: 40kHz
最大検出距離: 約3m
最小検出距離: 2-3cm
精度: 最大0.2cm
検出角度: 15度未満
入力トリガーパルス: 10μs TTLレベル
出力エコー信号: TTLレベル信号(高レベル)、距離に比例
4. 準備
micro:bitボードをkeyestudio 4WD Mecanum Robot Car V2.0のスロットに差し込む
電池を電池ホルダーに入れる
電源スイッチをONにする
USBケーブルでmicro:bitをコンピュータに接続する
Muのオフライン版を起動する
5. テストコード
Muソフトを開き、ファイル“Ultrasonic Ranging.py”を開いてコードを読み込みます。編集ウィンドウに自分でコードを入力しても構いません。
(Note: All English words and symbols must be written in English.)
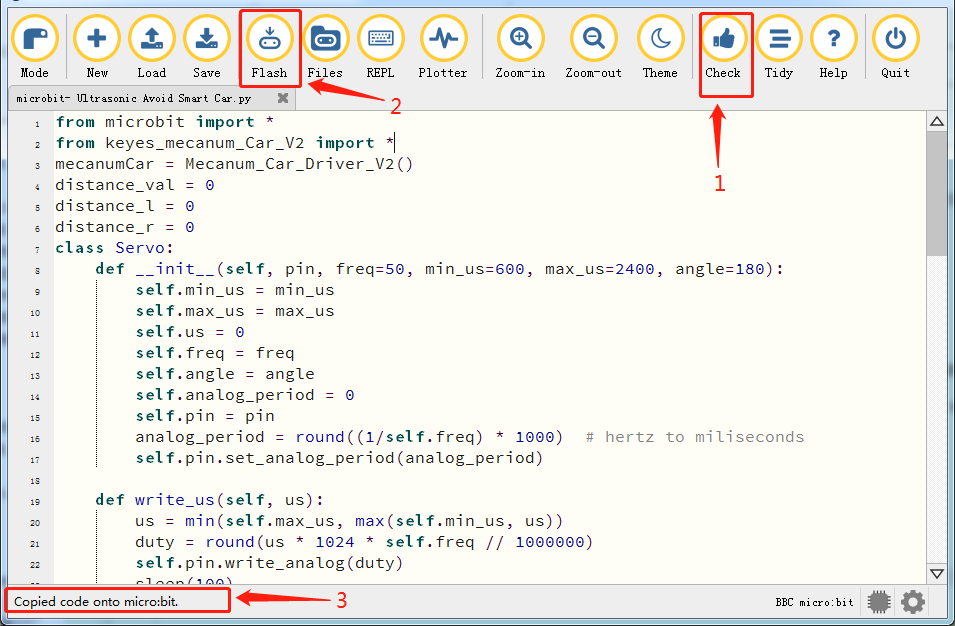
「Files」をクリックして“keyes_mecanum_Car_V2.py”ライブラリファイルをmicro:bitにインポートします。
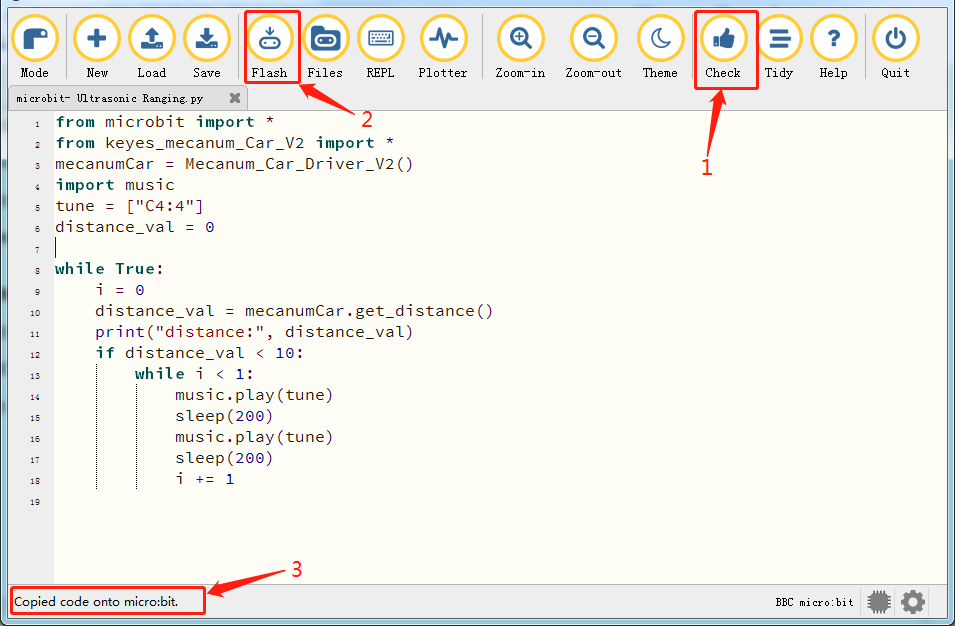
「Check」をクリックしてコードのエラーを確認します。下線やカーソル表示がある場合はプログラムに誤りがあります。
コードが正しければ、micro:bitをコンピュータに接続した状態で「Flash」をクリックしてコードをmicro:bitボードに書き込みます。
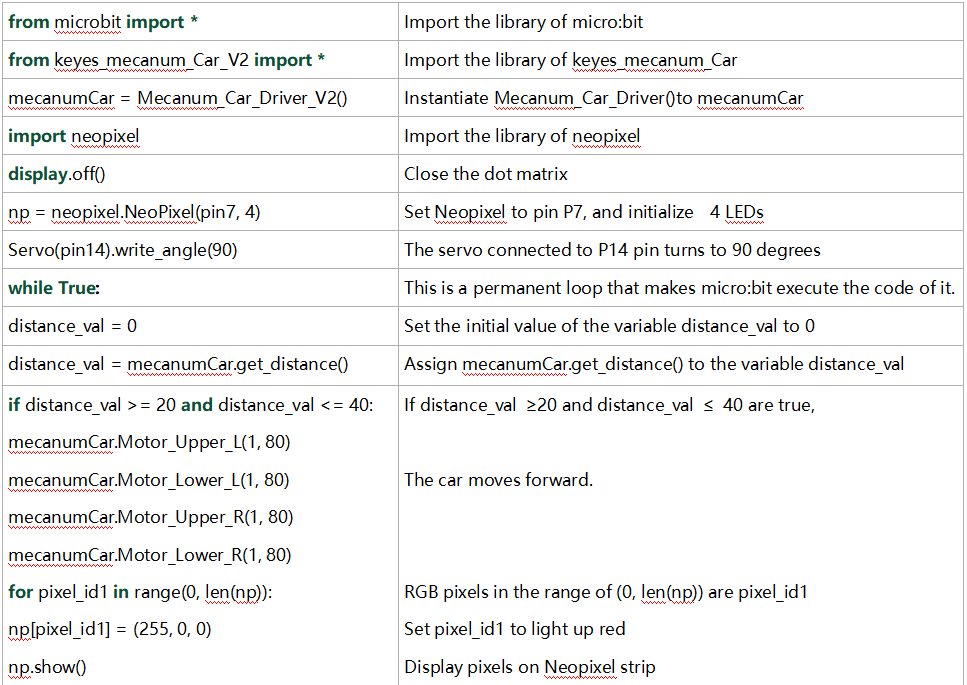
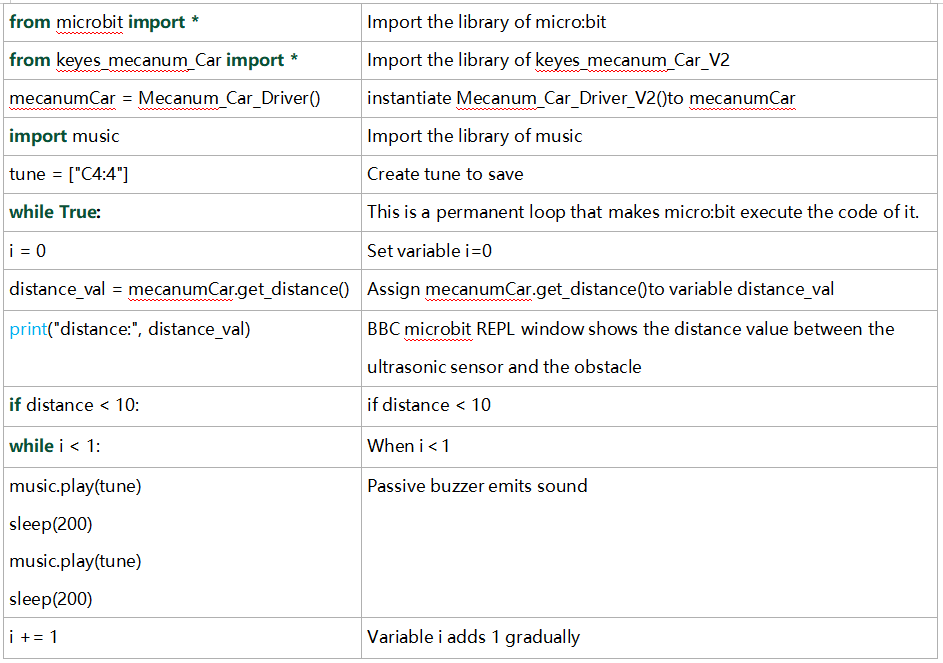
from microbit import *
from keyes_mecanum_Car_V2 import *
mecanumCar = Mecanum_Car_Driver_V2()
import music
tune = ["C4:4"]
distance_val = 0
while True:
i = 0
distance_val = mecanumCar.get_distance()
print("distance:", distance_val)
if distance_val < 10:
while i < 1:
music.play(tune)
sleep(200)
music.play(tune)
sleep(200)
i += 1
6. テスト結果
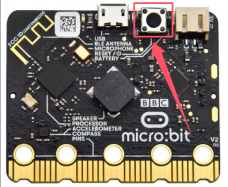
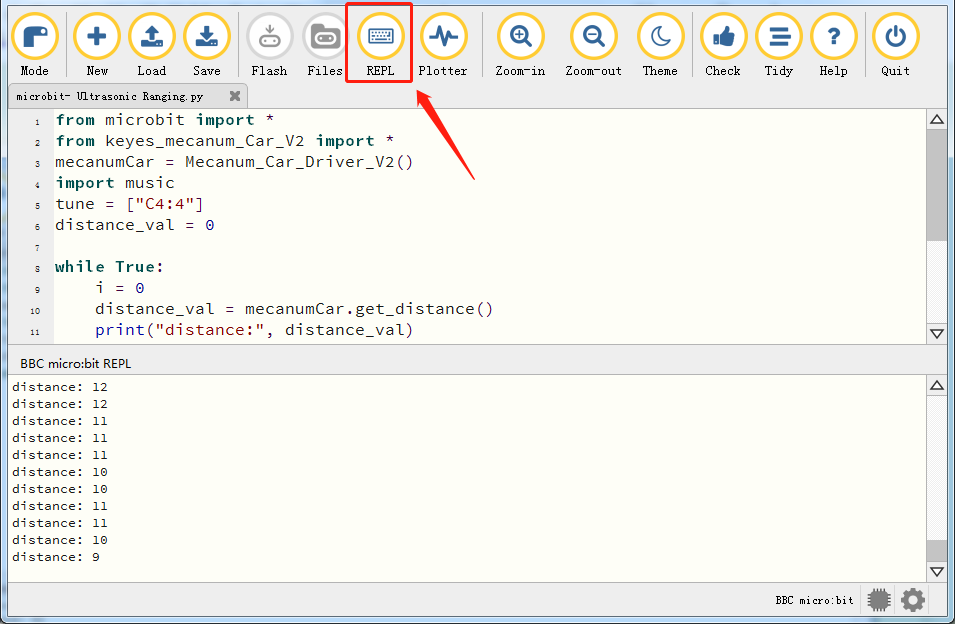
コードをボードに正常にダウンロードしたら、USBケーブルを抜かないでください。「REPL」をクリックしてからリセットボタンを押します。
障害物までの距離値が表示されます。下図のように表示されます。
距離が10cm未満になると、スマートカーのパッシブブザーが鳴ります。
7. コード説明
プロジェクト 18.2:超音波回避
1. 説明
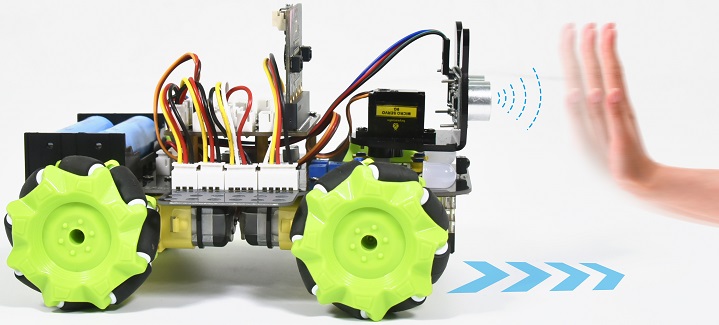
このプロジェクトでは、超音波センサーを車体に組み込み、超音波回避(障害物回避)車を作成します。
原理は、超音波センサーで車と障害物との距離を検出し、その距離に応じてスマートカーの動作を制御することです。
2. 準備
micro:bitボードをkeyestudio 4WD Mecanum Robot Car V2.0のスロットに差し込む
電池を電池ホルダーに入れる
電源スイッチをONにする
USBケーブルでmicro:bitをコンピュータに接続する
Muのオフライン版を起動する
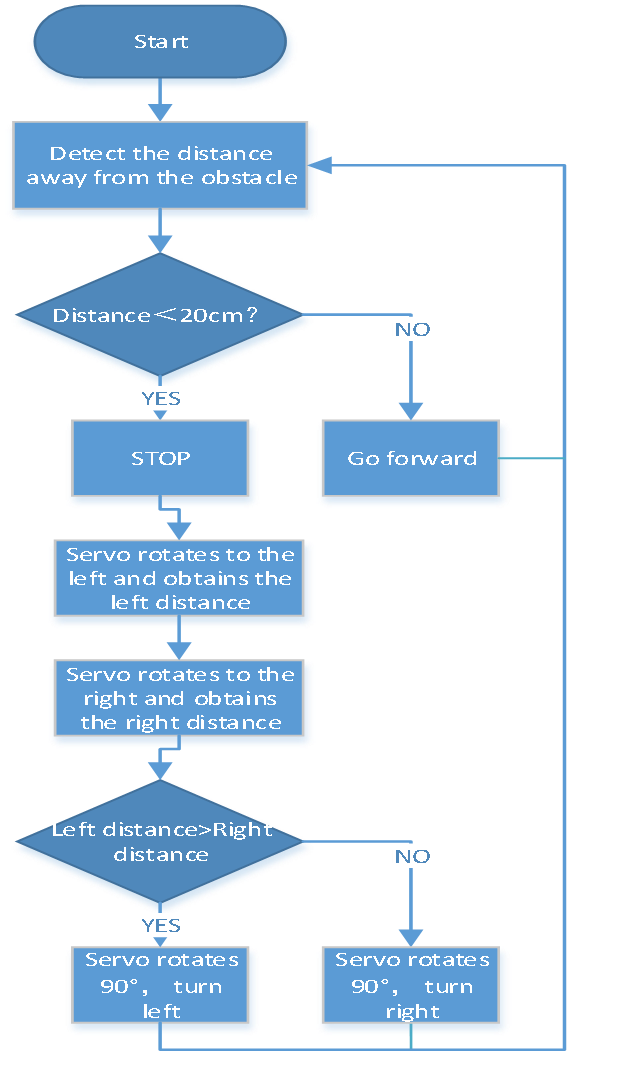
3. フローチャート
4. テストコード
Muソフトを開き、ファイル“Ultrasonic Avoid Smart Car.py”を開いてコードを読み込みます。編集ウィンドウに自分でコードを入力しても構いません。
(Note: All English words and symbols must be written in English.)
「Files」をクリックして“keyes_mecanum_Car_V2.py”ライブラリファイルをmicro:bitにインポートします。
「Check」をクリックしてコードのエラーを確認します。下線やカーソル表示がある場合はプログラムに誤りがあります。
コードが正しければ、micro:bitをコンピュータに接続した状態で「Flash」をクリックしてコードをmicro:bitボードに書き込みます。
from microbit import *
from keyes_mecanum_Car_V2 import *
mecanumCar = Mecanum_Car_Driver_V2()
distance_val = 0
distance_l = 0
distance_r = 0
class Servo:
def __init__(self, pin, freq=50, min_us=600, max_us=2400, angle=180):
self.min_us = min_us
self.max_us = max_us
self.us = 0
self.freq = freq
self.angle = angle
self.analog_period = 0
self.pin = pin
analog_period = round((1/self.freq) * 1000) # hertz to miliseconds
self.pin.set_analog_period(analog_period)
def write_us(self, us):
us = min(self.max_us, max(self.min_us, us))
duty = round(us * 1024 * self.freq // 1000000)
self.pin.write_analog(duty)
sleep(100)
self.pin.write_analog(0)
def write_angle(self, degrees=None):
if degrees is None:
degrees = math.degrees(radians)
degrees = degrees % 360
total_range = self.max_us - self.min_us
us = self.min_us + total_range * degrees // self.angle
self.write_us(us)
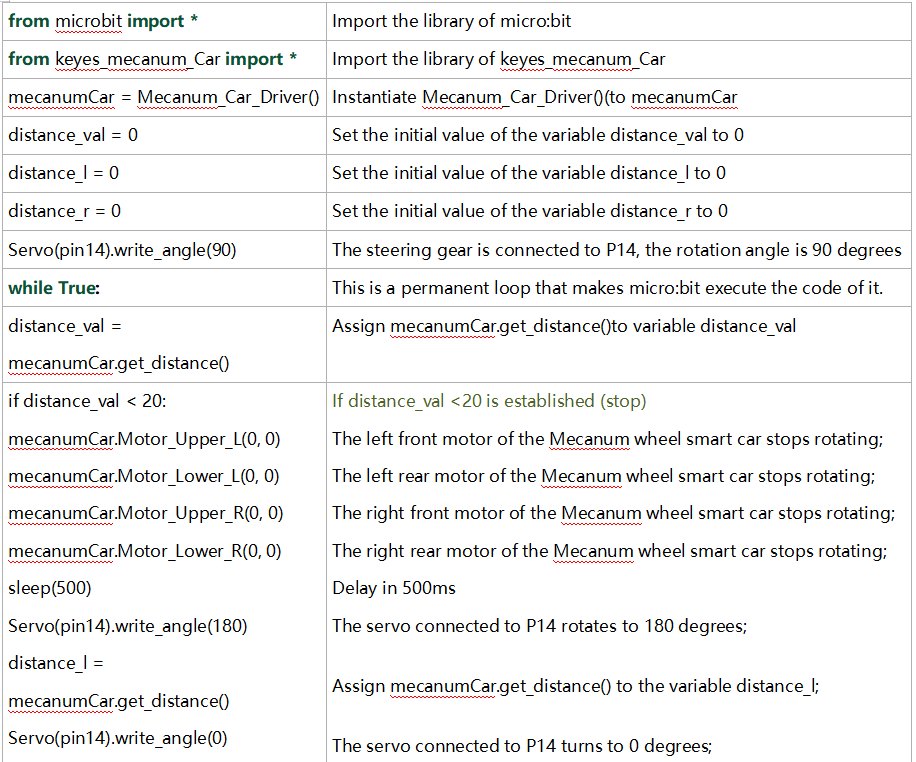
Servo(pin14).write_angle(90)
while True:
distance_val = mecanumCar.get_distance()
if distance_val < 20:
mecanumCar.Motor_Upper_L(0, 0)
mecanumCar.Motor_Lower_L(0, 0)
mecanumCar.Motor_Upper_R(0, 0)
mecanumCar.Motor_Lower_R(0, 0)
sleep(500)
Servo(pin14).write_angle(180)
sleep(500)
distance_l = mecanumCar.get_distance()
sleep(500)
Servo(pin14).write_angle(0)
sleep(500)
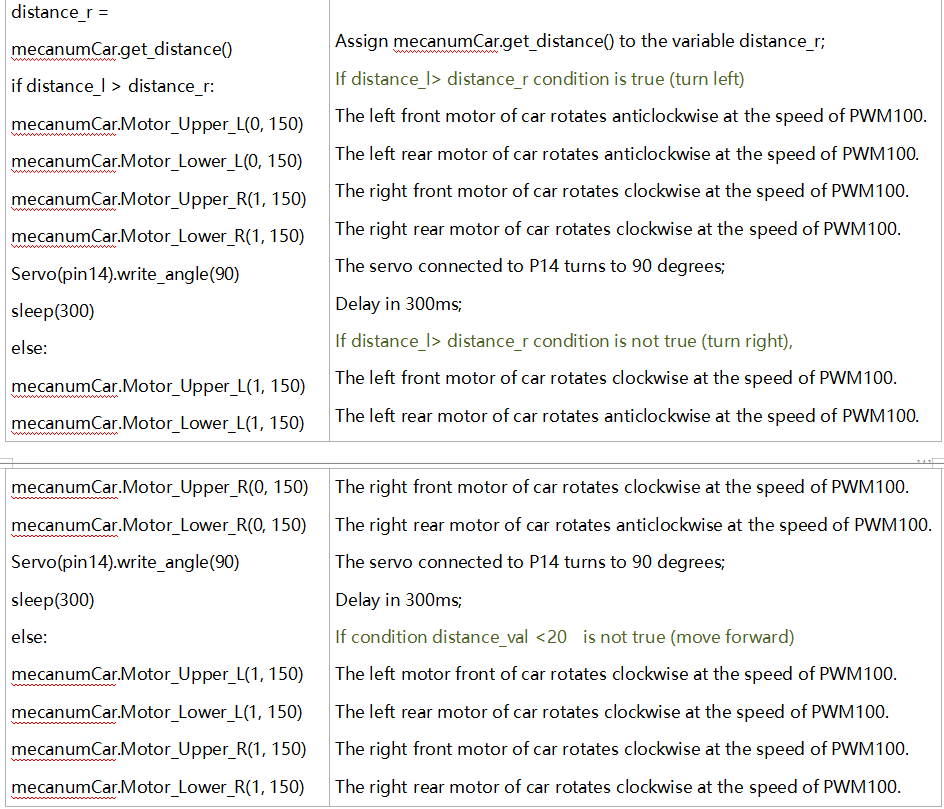
distance_r = mecanumCar.get_distance()
sleep(500)
if distance_l > distance_r:
mecanumCar.Motor_Upper_L(0, 100)
mecanumCar.Motor_Lower_L(0, 100)
mecanumCar.Motor_Upper_R(1, 100)
mecanumCar.Motor_Lower_R(1, 100)
Servo(pin14).write_angle(90)
sleep(300)
else:
mecanumCar.Motor_Upper_L(1, 100)
mecanumCar.Motor_Lower_L(1, 100)
mecanumCar.Motor_Upper_R(0, 100)
mecanumCar.Motor_Lower_R(0, 100)
Servo(pin14).write_angle(90)
sleep(300)
else:
mecanumCar.Motor_Upper_L(1, 100)
mecanumCar.Motor_Lower_L(1, 100)
mecanumCar.Motor_Upper_R(1, 100)
mecanumCar.Motor_Lower_R(1, 100)
5. テスト結果
コードをボードに正常にダウンロードしたら、外部電源を接続する(DIPスイッチをONにする)、その後micro:bitのリセットボタンを押します。
障害物までの距離が20cmより大きいときは車が前進します;反対に(20cm未満のとき)はスマートカーが左へ曲がります。
6. コード説明
プロジェクト 18.3:超音波追従
1. 説明
前のレッスンでライン追跡センサーの基本原理を学びました。次に、超音波センサーを車と組み合わせて超音波追従車を作成します。
超音波センサーが障害物との距離を検知し、その距離に応じて車の動作状態を制御します。
2. 準備
micro:bitボードをkeyestudio 4WD Mecanum Robot Car V2.0のスロットに差し込む
電池を電池ホルダーに入れる
電源スイッチをONにする
USBケーブルでmicro:bitをコンピュータに接続する
Muのオフライン版を起動する
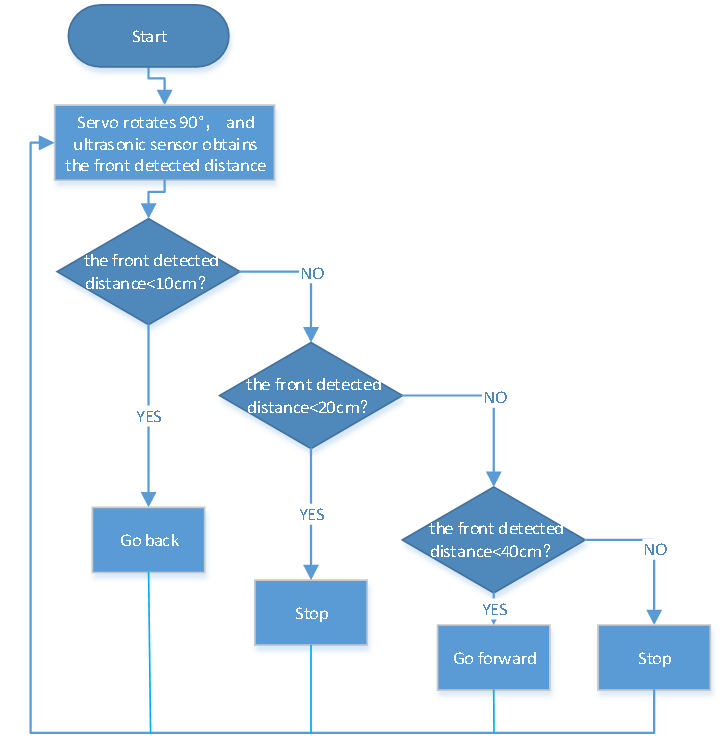
2. フローチャート
3. テストコード
Muソフトを開き、ファイル“Ultrasonic Follow Smart Car.py”を開いてコードを読み込みます。編集ウィンドウに自分でコードを入力しても構いません。
(Note: All English words and symbols must be written in English.)
「Files」をクリックして“keyes_mecanum_Car_V2.py”ライブラリファイルをmicro:bitにインポートします。
「Check」をクリックしてコードのエラーを確認します。下線やカーソル表示がある場合はプログラムに誤りがあります。
コードが正しければ、micro:bitをコンピュータに接続した状態で「Flash」をクリックしてコードをmicro:bitボードに書き込みます。

from microbit import *
from keyes_mecanum_Car_V2 import *
import neopixel
display.off()
mecanumCar = Mecanum_Car_Driver_V2()
np = neopixel.NeoPixel(pin7, 4)
class Servo:
def __init__(self, pin, freq=50, min_us=600, max_us=2400, angle=180):
self.min_us = min_us
self.max_us = max_us
self.us = 0
self.freq = freq
self.angle = angle
self.analog_period = 0
self.pin = pin
analog_period = round((1/self.freq) * 1000) # hertz to miliseconds
self.pin.set_analog_period(analog_period)
def write_us(self, us):
us = min(self.max_us, max(self.min_us, us))
duty = round(us * 1024 * self.freq // 1000000)
self.pin.write_analog(duty)
sleep(100)
self.pin.write_analog(0)
def write_angle(self, degrees=None):
if degrees is None:
degrees = math.degrees(radians)
degrees = degrees % 360
total_range = self.max_us - self.min_us
us = self.min_us + total_range * degrees // self.angle
self.write_us(us)
Servo(pin14).write_angle(90)
while True:
distance_val = 0
distance_val = mecanumCar.get_distance()
if distance_val >= 20 and distance_val <= 40:
mecanumCar.Motor_Upper_L(1, 80)
mecanumCar.Motor_Lower_L(1, 80)
mecanumCar.Motor_Upper_R(1, 80)
mecanumCar.Motor_Lower_R(1, 80)
for pixel_id1 in range(0, len(np)):
np[pixel_id1] = (255, 0, 0)
np.show()
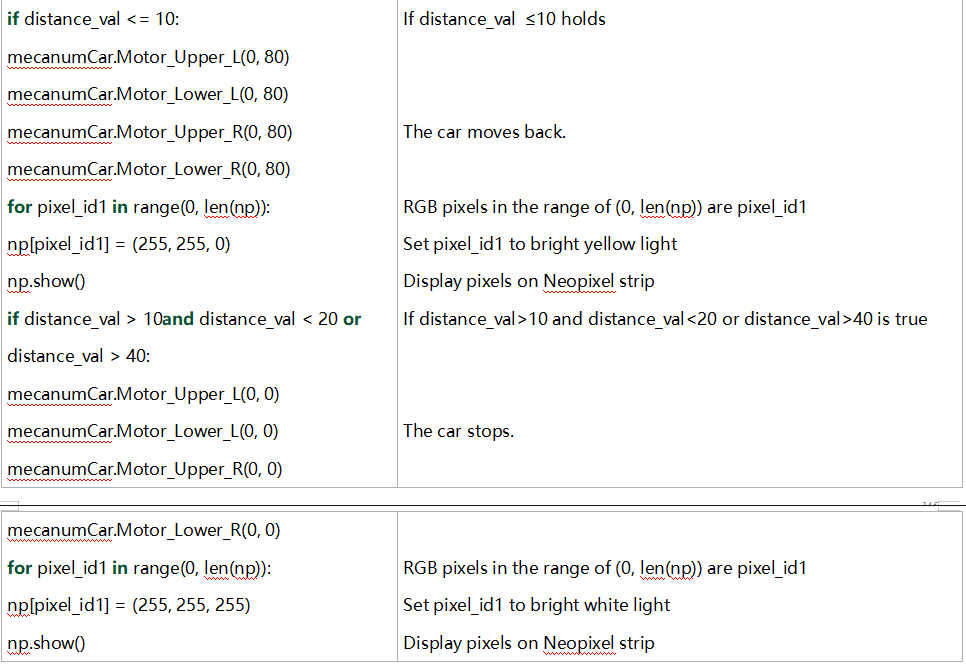
if distance_val <= 10:
mecanumCar.Motor_Upper_L(0, 80)
mecanumCar.Motor_Lower_L(0, 80)
mecanumCar.Motor_Upper_R(0, 80)
mecanumCar.Motor_Lower_R(0, 80)
for pixel_id1 in range(0, len(np)):
np[pixel_id1] = (255, 255, 0)
np.show()
if distance_val > 10 and distance_val < 20 or distance_val > 40:
mecanumCar.Motor_Upper_L(0, 0)
mecanumCar.Motor_Lower_L(0, 0)
mecanumCar.Motor_Upper_R(0, 0)
mecanumCar.Motor_Lower_R(0, 0)
for pixel_id1 in range(0, len(np)):
np[pixel_id1] = (255, 255, 255)
np.show()
4. テスト結果
コードをボードに正常にダウンロードしたら、外部電源を接続する(DIPスイッチをONにする)、その後micro:bitのリセットボタンを押します。
スマートカーは障害物に追従して移動し、4つのWS2812 RGBライトが異なる色を表示します。
注意: 障害物はスマートカーの前方でのみ移動させてください。
5. コード説明