Progetto 5: Controllo del Servomotore
(1)Descrizione:
Un servomotore è un attuatore rotante per il controllo della posizione. È composto principalmente da un alloggiamento, una scheda circuito, un motore senza nucleo, un ingranaggio e un sensore di posizione. Il suo principio di funzionamento è che il servo riceve il segnale inviato dal MCU o dal ricevitore e produce un segnale di riferimento con un periodo di 20ms e una larghezza di 1,5ms. Confronta quindi la tensione di polarizzazione CC acquisita con la tensione del potenziometro e ottiene l’uscita della differenza di tensione.
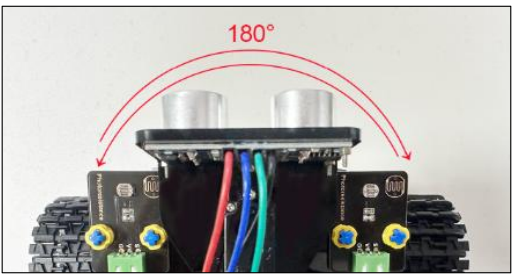
Quando la velocità del motore è costante, il potenziometro viene azionato a ruotare attraverso l’ingranaggio di riduzione a cascata, il che porta la differenza di tensione a 0 e il motore si ferma. In generale, l’angolo di rotazione del servo è compreso tra 0° e 180°.
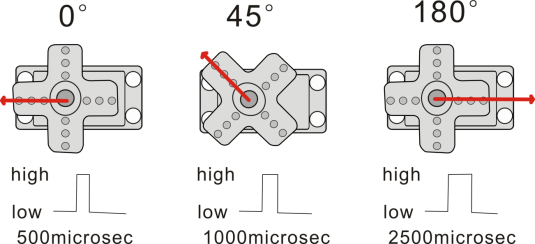
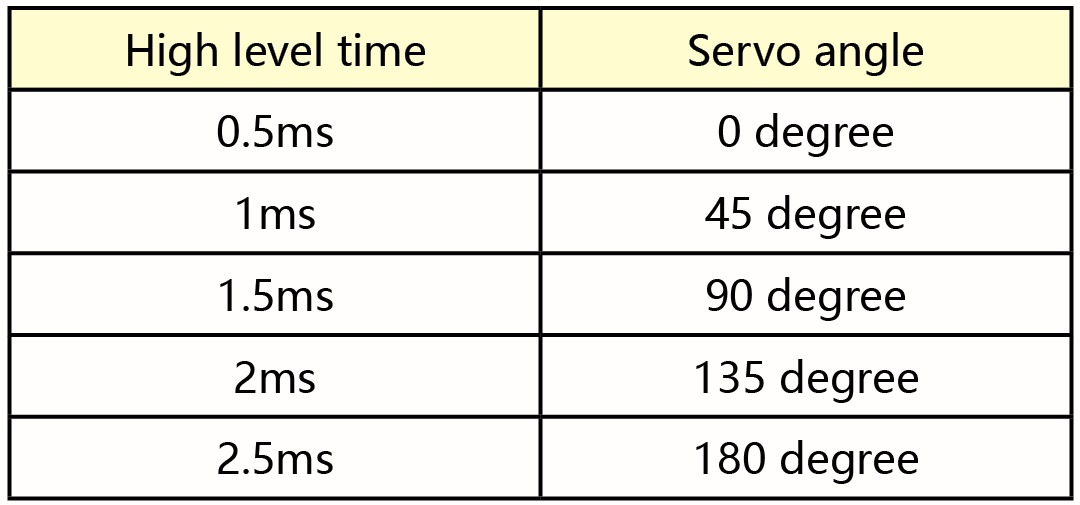
L’angolo di rotazione del servomotore è controllato regolando il ciclo di lavoro del segnale PWM (Pulse-Width Modulation). Il ciclo standard del segnale PWM è 20ms (50Hz). Teoricamente, la larghezza è distribuita tra 1ms-2ms, ma in realtà è tra 0,5ms-2,5ms. La larghezza corrisponde all’angolo di rotazione da 0° a 180°. Si noti che per motori di marchi diversi, lo stesso segnale può risultare in angoli di rotazione diversi.
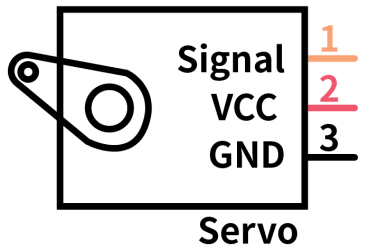
In generale, il servo ha tre fili: marrone, rosso e arancione. Il filo marrone è la massa, quello rosso è il polo positivo e quello arancione è il filo del segnale.
L’angolo del servo:
(2)Parametri:
Tensione di lavoro: DC 4,8V ~ 6V
Intervallo angolo operativo: circa 180° (a 500 → 2500 μsec)
Intervallo larghezza impulso: 500 → 2500 μsec
Velocità a vuoto: 0,12 ± 0,01 sec / 60 (DC 4,8V) 0,1 ± 0,01 sec / 60 (DC 6V)
Corrente a vuoto: 200 ± 20mA (DC 4,8V) 220 ± 20mA (DC 6V)
Coppia di stallo: 1,3 ± 0,01kg · cm (DC 4,8V) 1,5 ± 0,1kg · cm (DC 6V)
Corrente di stallo: ≦ 850mA (DC 4,8V) ≦ 1000mA (DC 6V)
Corrente in standby: 3 ± 1mA (DC 4,8V) 4 ± 1mA (DC 6V)
(3)Schema di Collegamento:
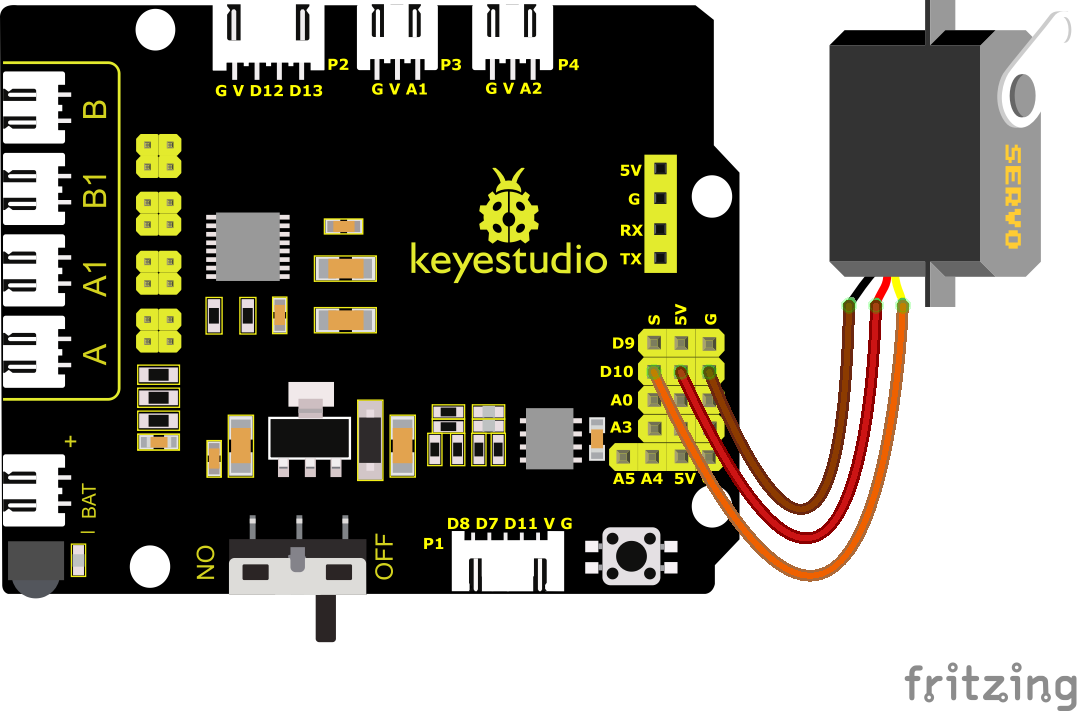
Nota: I fili marrone, rosso e arancione del servo sono collegati rispettivamente a Gnd(G), 5v(V) e D10 dello shield. Ricordare di collegare un’alimentazione esterna a causa dell’elevata corrente del servo. In caso contrario, la scheda di sviluppo potrebbe bruciarsi.
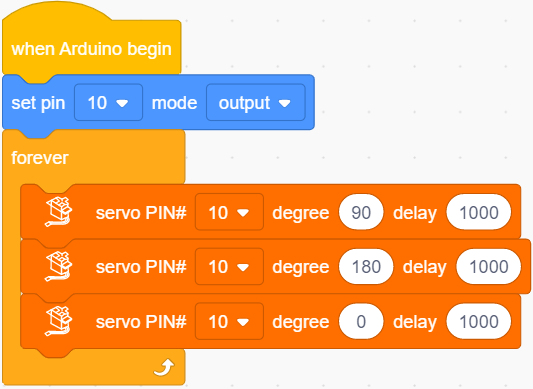
(4)Codice di Test:
È possibile anche trascinare i blocchi per modificare il codice, come mostrato di seguito


Codice di Test Completo
(Nota: Non collegare il modulo Bluetooth prima di caricare il codice, poiché il caricamento del codice utilizza anche la comunicazione seriale e potrebbero verificarsi conflitti con la comunicazione seriale Bluetooth, causando il fallimento del caricamento.)
(6)Risultati del Test:
Caricare il codice, collegare l’alimentazione e il servo si muove nell’intervallo tra 0° e 180°.