Progetto 8: Controllo e Velocità del Motore
(1)Descrizione:
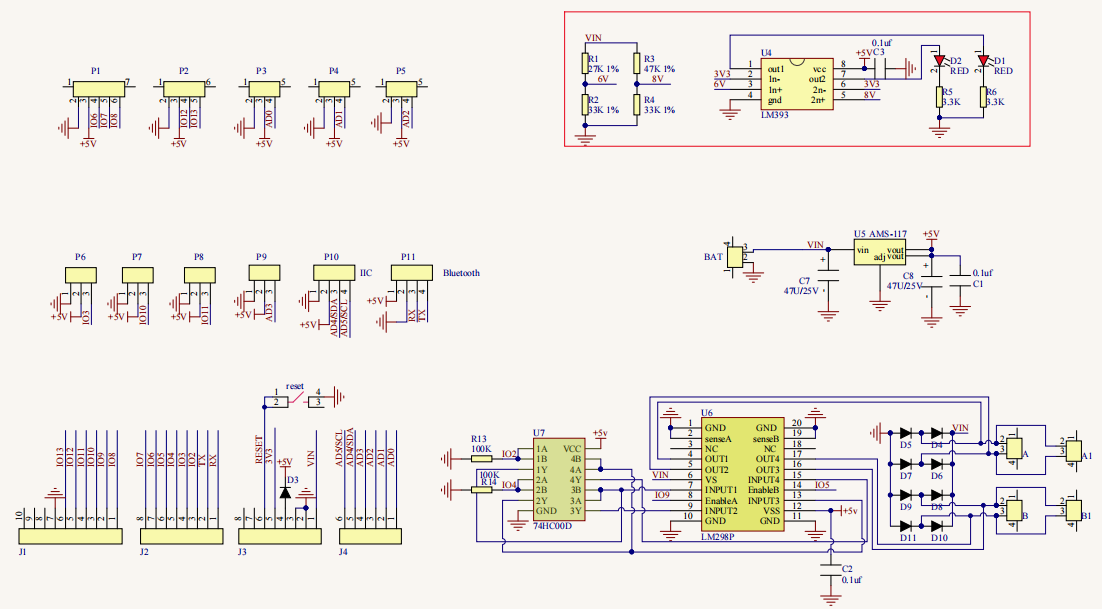
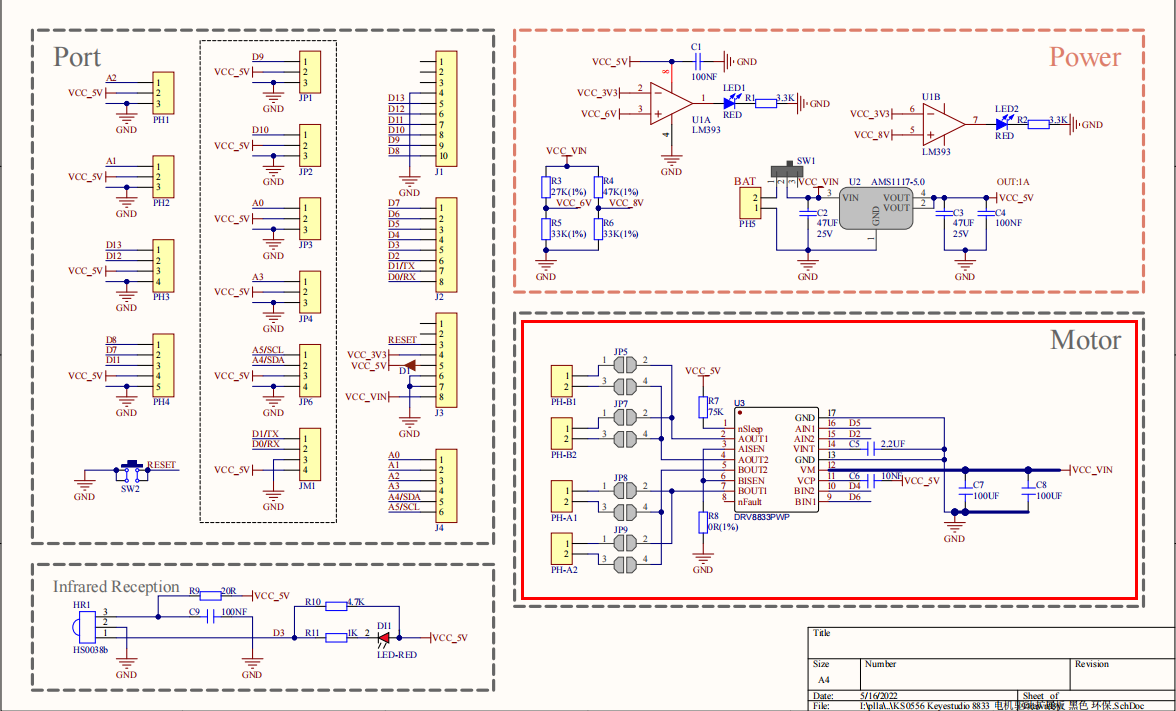
Esistono molti modi per pilotare i motori. La nostra auto intelligente utilizza la soluzione più comune chiamata L298P. L298P, prodotto da STMicroelectronics, è un eccellente chip di pilotaggio appositamente progettato per guidare motori ad alta potenza. Può pilotare direttamente motori DC, motori a due e quattro fasi con una corrente di pilotaggio fino a 2A. Il terminale di uscita del motore adotta 8 diodi Schottky ad alta velocità come protezione. Abbiamo progettato una scheda di espansione basata sul circuito L298P, il cui design a impilamento può essere collegato direttamente alla scheda UNO R3 riducendo le difficoltà tecniche per gli utenti nell’uso e nel pilotaggio del motore.
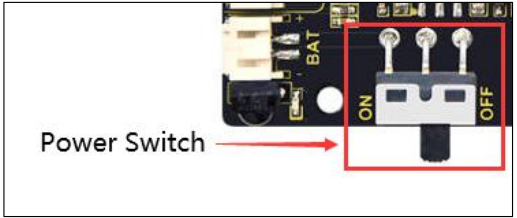
Impila la scheda di espansione sulla scheda, alimenta la BAT, porta il selettore DIP sull’estremità ON e alimenta contemporaneamente la scheda di espansione e la scheda UNO R3 tramite alimentazione esterna. Per facilitare il cablaggio, la scheda di espansione è dotata di un’interfaccia anti-inversione (PH2.0 -2P -3P -4P -5P) e quindi può essere collegata direttamente con motori, alimentatori e sensori/moduli. L’interfaccia Bluetooth della scheda di espansione del driver è completamente compatibile con il modulo Bluetooth Keyestudio HM-10. Pertanto, dobbiamo solo inserire il modulo Bluetooth HM-10 nell’interfaccia corrispondente durante la connessione. Allo stesso tempo, la scheda di espansione del driver utilizza anche header pin da 2,54 mm per estendere alcune porte digitali e analogiche disponibili, così da poter continuare ad aggiungere altri sensori ed effettuare esperimenti di espansione.
La scheda di espansione può essere collegata a 4 motori DC. Nella modalità di connessione con jumper cap predefinita, i motori delle interfacce A e A1, B e B1 sono collegati in parallelo e il loro schema di movimento è lo stesso. 8 jumper cap possono essere utilizzati per controllare il senso di rotazione delle 4 interfacce motore. Ad esempio, quando i due jumper cap davanti all’interfaccia del motore A vengono cambiati da una connessione orizzontale a una connessione verticale, il senso di rotazione del motore A diventa opposto a quello originale.
(2)Parametri:
Tensione di ingresso della parte logica: DC 5V
Tensione di ingresso della parte di pilotaggio: DC 7-12V
Corrente di funzionamento della parte logica: ≤36mA
Corrente di funzionamento della parte di pilotaggio: ≤ 2A
Potenza massima di dissipazione: 25W (T=75℃)
Livello del segnale di controllo in ingresso:
Livello alto: 2.3V ≤ Vin ≤ 5V
Livello basso: 0V ≤ Vin ≤ 1.5V
Temperatura di funzionamento: -25℃~+130℃
(3)Guida il robot a muoversi:
Il pin di direzione del motore A è D2, il pin di controllo della velocità è D5; il pin di direzione del motore B è D4 e il pin di controllo della velocità è D6.
In base alla tabella seguente, possiamo sapere come controllare il movimento del robot controllando la rotazione di due motori tramite le porte digitali e le porte PWM. Il valore PWM è compreso nell’intervallo 0-255. Maggiore è il valore, più velocemente ruota il motore.
Funzione |
D4 |
D6(PWM) |
Motore (sinistra) B |
D2 |
D5(PWM) |
Motore (destra) A |
|---|---|---|---|---|---|---|
Avanza |
HIGH |
0 |
Ruota a sinistra |
HIGH |
0 |
Ruota a sinistra |
Indietreggia |
LOW |
255 |
Ruota a destra |
LOW |
255 |
Ruota a destra |
Gira a sinistra |
LOW |
255 |
Ruota a destra |
HIGH |
100 |
Ruota a sinistra |
Gira a destra |
HIGH |
100 |
Ruota a sinistra |
LOW |
255 |
Ruota a destra |
Stop |
LOW |
0 |
Stop |
LOW |
0 |
Stop |
(4)Schema di collegamento:
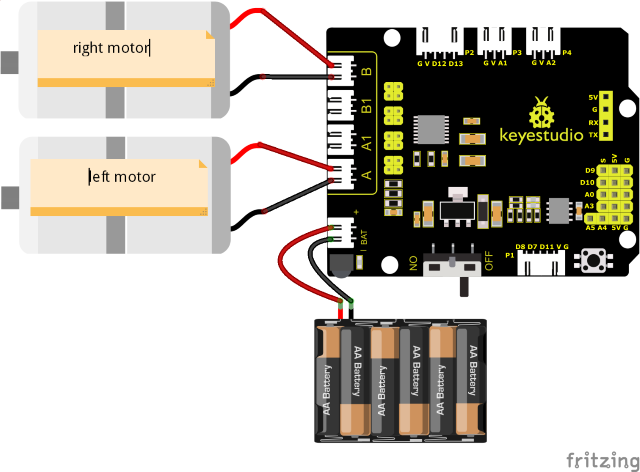
Nota:
Il connettore a 4 pin è contrassegnato con A, A1, B1 e B. Il motore posteriore destro è collegato a B della scheda 8833 e quello anteriore sinistro è collegato alla porta A.
(5)Codice di Test:
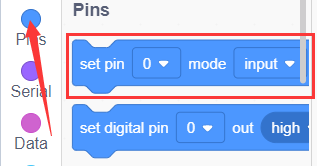
Puoi anche trascinare i blocchi per modificare il tuo codice, come mostrato di seguito.
(1)
(2)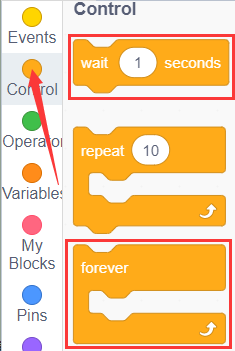
(3)
(4)
Codice di Test Completo
(Nota: Non collegare il modulo Bluetooth prima di caricare il codice, perché il caricamento del codice utilizza anche la comunicazione seriale, e potrebbero esserci conflitti con la comunicazione seriale Bluetooth, che possono causare il fallimento del caricamento.)

(6)Risultati del Test:
Dopo aver cablato secondo lo schema, caricato il codice di test e alimentato il tutto.
l’auto intelligente avanza per 2s, indietreggia per 2s, gira a sinistra per 2s, gira a destra per 2s e si ferma per 2s.